石豪:月球背面這波高難操作,中國航天人怎麼做到的?
【文/觀察者網專欄作者 石豪】
2018年12月8日2時23分34秒367毫秒,嫦娥四號月球探測器從我國西昌衞星發射中心成功發射,人類首次月球背面着陸巡視探測揚帆起航。月球背面探測的測控和通信,一直是世界性難題,本文是嫦娥四號任務系列文章的第二篇,筆者就與各位讀者一起聊聊中國航天人是如何解決這個問題的。
一. 軌道探索
由於月球的背面一直無法被人類直接觀測,當探測器飛到月球背面時,與地球無法通過無線電進行聯絡,探測器的實時狀態和科學數據傳不下來,地球的指令也送不上去。
因此,解決月球背面着陸巡視過程中的通信問題,就成為橫亙在嫦娥四號任務前的一道天塹。不能建造一座橫跨天塹的橋,整個任務的實施就無從談起。
那麼問題來了——在哪裏造橋呢?
人類對於地月系統中引力平衡點軌道的研究,最早甚至可以追溯到18世紀。
1765年,數學巨匠歐拉發現,在任意一個旋轉的二體系統中,都存在3個與二體共線的平動點。1772年,法國數學家拉格朗日進一步確定了另外兩個與二體成等邊三角形關係的平衡點。

萊昂哈德•歐拉 |約瑟夫•拉格朗日
後人將這五個平衡點統稱為“拉格朗日點”,所有拉格朗日點都在二體的旋轉平面內。

二體問題中的五個拉格朗日點位置| 圖片來源EnEdC@Wikipedia
在這五個拉格朗日點中,L4和L5點是穩定平衡點,就像放在碗中的小球,任何讓小球偏離原位的小擾動,都會以小球滾回原位穩定下來告終。
穩定平衡的小球
對L4和L5,自然界中最著名的例子當屬太陽-木星系統中的特洛伊小行星羣,數以千計的小行星被太陽和木星的引力俘獲,進入日木二體系統的L4和L5點附近,與木星一起穩定地繞太陽公轉。對L4點的小行星,科學家以特洛伊戰爭中希臘方的英雄命名,對L5點的小行星則以特洛伊城方的英雄命名。

特洛伊小行星羣 |圖片來源@NASA
而L1、L2和L3都是不穩定平衡點,就像放在倒扣的碗正上方的小球,稍有擾動就會離開原有位置。

不穩定平衡的小球
儘管L1、L2和L3都是不穩定平衡點,科學家們發現,只要用很小的速度增量,就能讓航天器在拉格朗日點附近的局域空間內運行。
如果航天器繞拉格朗日點的週期性運行只維持在二體系統的公轉平面內,就會形成二維平面上的閉合軌道,這種軌道被稱作李雅普諾夫軌道(Lyapunov Orbit)。
如果航天器有垂直於二體系統公轉平面的運動,且平面內運動的週期與垂直運動的週期一致,就會形成三維平面上的閉合軌道,這種軌道就是羅伯特•法夸爾命名的暈軌道(Halo Orbit)。從地球看去,這種軌道就像月暈那樣環繞着月亮。
當平面內運動的週期與垂直運動的週期不一致,軌道將在三維空間內產生進動,稱為李薩如軌道(Lissajous Orbit),玩過示波器的讀者朋友應該很熟悉李薩如圖形。
還有一類軌道,與暈軌道有偏差,但這種偏差保持在一定範圍內,被稱為擬暈軌道(Quasi-Halo Orbit)。
如果讀者朋友已經看暈了的話,下面一張圖能夠讓大家完美識別這四種軌道,其中左上角圖(a)為李雅普諾夫軌道,右上角圖(b)為暈軌道,左下角圖(c)為李薩如軌道,右下角圖(d)為擬暈軌道:
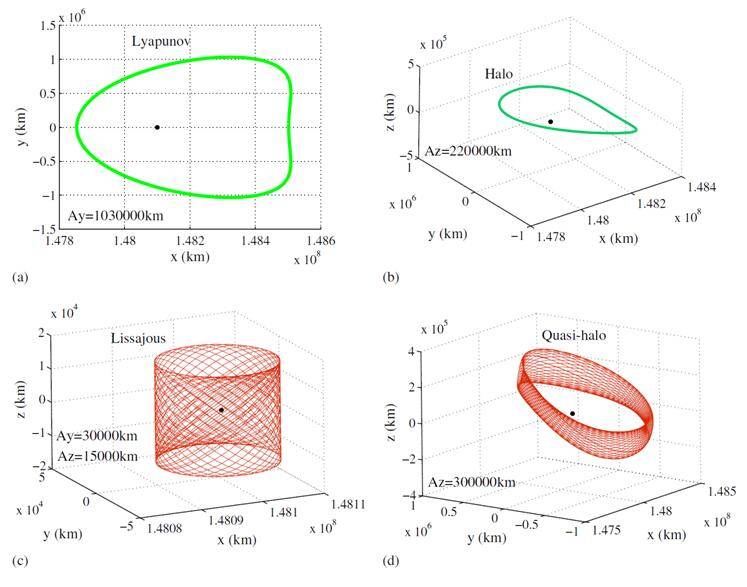
圖片來源Rui Qi and Shijie Xu @BIT
毫無疑問,對於月球背面探測任務,以地月L2點暈軌道為使命軌道穩定運行的中繼星,就是跨越月背天塹的橋。
所以,中國航天人建造了“鵲橋”——一顆小巧的中繼衞星。

鵲橋號衞星|圖片來源@中國空間技術研究院
二. 鵲橋選址
儘管確定了暈軌道作為鵲橋號衞星的軌道類型,但對於實際的軌道設計,我們的軌道專家則考慮得更多。
一方面,作為使命軌道的暈軌道不能太小。因為鵲橋號的初衷是為嫦娥四號的月背探測提供持續的數據中繼傳輸,過小的軌道會進入月球相對地球的陰影區,信號被月球遮擋——這被稱為月掩。這是我們不採用李薩如軌道的原因,複雜的進動軌道在漫長的任務週期中難免出現月掩,這對於任務設計而言不可接受。
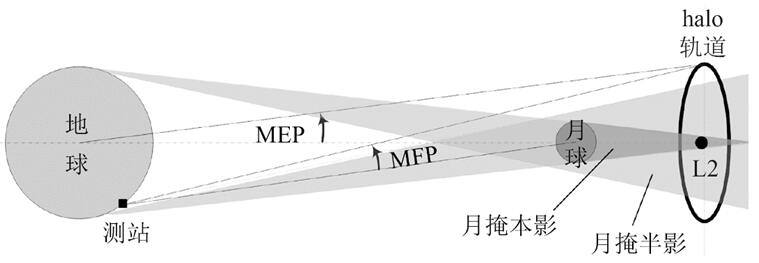
月掩示意圖 |圖片來源高珊,周文豔等 @中國空間技術研究院
另一方面,作為使命軌道的暈軌道又不能太大。我們把落月的嫦娥四號探測器和鵲橋號中繼星的連線,與嫦娥四號當地月球地平線的夾角稱為高度角。這個角度是嫦娥四號探測器“仰望”中繼星的角度,如果高度角太小,信號就相當於貼着月球表面發射,嚴重影響信號質量。

月球高度角示意圖
當使命軌道的振幅過大時,高度角自然會減小,而同高度角情況下月球表面能“看”到中繼星的區域也會變少。因此,鵲橋號衞星的使命軌道在地月公轉平面外的振幅,可以取1萬到1.5萬千米。這樣,在中繼星的3年任務週期內,可以100%不間斷地被嫦娥四號“仰望”,並且信號質量有保障。
嫦娥四號與鵲橋號中繼星進行低高度角通信 |圖片來源@中國空間技術研究院
到此為止了嗎?
當然沒有,科學家還要考慮軌道的光照條件。
地球和月球在被太陽光照射時,會在他們身後形成一道長長的陰影,依靠太陽帆板提供電力的鵲橋號,如果長期運行在地球或月球的陰影中,就會出現電力不足,無法正常工作的情況。

地影和月影 |圖片來源高珊,周文豔等 @中國空間技術研究院
在對比了南北兩個方向振幅的使命暈軌道後,科學家們發現,在任務週期內,南向振幅的暈軌道在地影和月影的發生次數、持續時長等方面都要好於北向的軌道。
因此,最終鵲橋號中繼星選擇了南向振幅13000km、軌道平均週期14天的暈軌道作為使命軌道。出於優化燃料使用的目的,鵲橋號的軌道控制採用擬暈軌道方式,實際軌道與使命軌道的偏差保持在較小的範圍內,每半圈(7天)進行一次軌道維持。

圖片來源 @中國空間技術研究總體部
三、飛向L2
鵲橋號衞星的軌道設計縝密而完善,但地月相距38萬千米,地月系統的L2點更是在地球的45萬千米之外,如何順利地將鵲橋號衞星送達預定軌道也是需要動一番腦筋的。
為此,我們的科學家設計了精巧的轉移軌道,可以使衞星以較少的燃料消耗安全抵達預定位置。

鵲橋號中繼星的飛行軌道 |圖片來源吳偉仁,王瓊等 @探月與航天工程中心
為了充分利用月球引力輔助減速,鵲橋號的近月點高度只有100千米,這對衞星的中途修正點火精度有着很高的要求,稍有偏差,鵲橋號就會步美國徘徊者4號的後塵,直接撞擊月面。
在鵲橋號到達L2點後,還要進行下圖中的三次變軌,真正進入繞L2飛行的暈軌道。
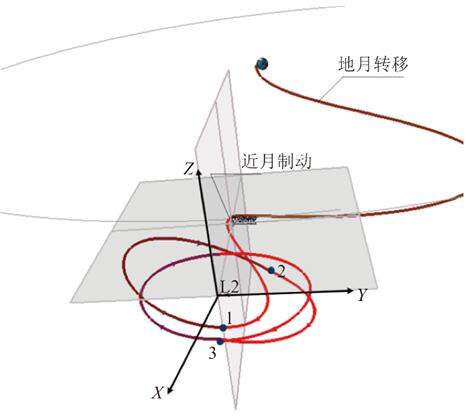
鵲橋號中繼星的轉移軌道 |圖片來源高珊,周文豔等 @中國空間技術研究院
2018年5月21日5時28分,鵲橋號中繼星搭載長征四號丙運載火箭,由西昌衞星發射中心發射升空,這也是長征四號系列火箭的第一次高軌道發射。

圖片來源 @新華社
上世紀80年代,我國為發射地球同步軌道衞星研製三級運載火箭,出於技術穩妥性考慮,採用常規燃料第三級的長征四號一度是第一方案。關鍵時刻,以任新民為代表的老一輩航天人,敏鋭地意識到液氫/液氧發動機在高軌道發射方面有着更廣闊的前景,果斷向黨中央建議支持採用氫氧機的長征三號火箭執行同步軌道發射。而長征四號系列則轉為發射太陽同步軌道和低地球軌道衞星。
鵲橋號中繼星的發射,也讓長征四號終於圓了設計之初的夢想。

航天巨擘任新民院士|圖片來源 @中國運載火箭技術研究院
5月25日21時32分,鵲橋號實施近月制動,這次制動精度很高,原計劃後續的第四次軌道修正取消。
6月14日11時,鵲橋號成功進入Halo使命軌道。
目前,鵲橋號整星工作正常,設備温度正常,各次軌控正常,平台各分系統功能正常,正在月球的另一邊,靜待嫦娥四號探測器的到來。
待到嫦娥歸來時,天塹變通途。
本文系觀察者網獨家稿件,未經授權,不得轉載。