百度閉門不造車:增強現實自動駕駛仿真系統走出實驗室_風聞
谭婧在充电-谭婧在充电官方账号-偏爱人工智能(数据、算法、算力、场景)。-2019-06-14 00:09

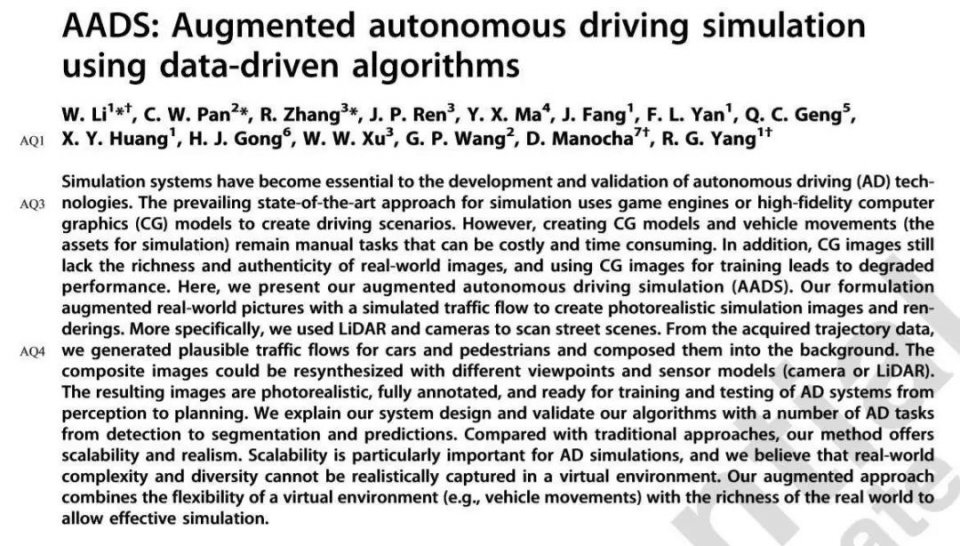
來自中國人工智能學者的論文《基於數據驅動算法的,增強現實的自動駕駛仿真系統》(AADS: Augmented autonomous driving simulation using data-driven algorithms)發表在《科學》雜誌子刊《科學·機器人學》上。《科學》雜誌是全球最權威的學術期刊之一,代表了人類自然科學研究的最高水平,《科學·機器人學》雜誌是其五個子刊之一,平均每期刊出不多於4篇的研究類文章,刊載難度很大。這篇論文的學者團隊包括南京航空航天大學、北京大學、浙江大學、香港大學等高校的在讀博士生。

仿真系統目前最先進的模擬方法是使用遊戲引擎保真計算機圖形(CG)模型來創建駕駛場景。李偉也在之前的採訪中打過一個有趣的比方:
“如果説一些廠商做的仿真系統看上去像動畫,那麼增強現實的自動駕駛仿真系統(AADS)就是真人COSPLAY。”

但是,現在的仿真系統存在幾個缺點:
第一、創建保真計算機圖形和車輛運動仍然是手工的任務,可能既昂貴,又費時。
第二、高保真計算機圖形仍然缺乏真實世界圖像的豐富性和真實性,使用高保真計算機圖形生成的數據訓練自動駕駛系統會導致其性能下降。
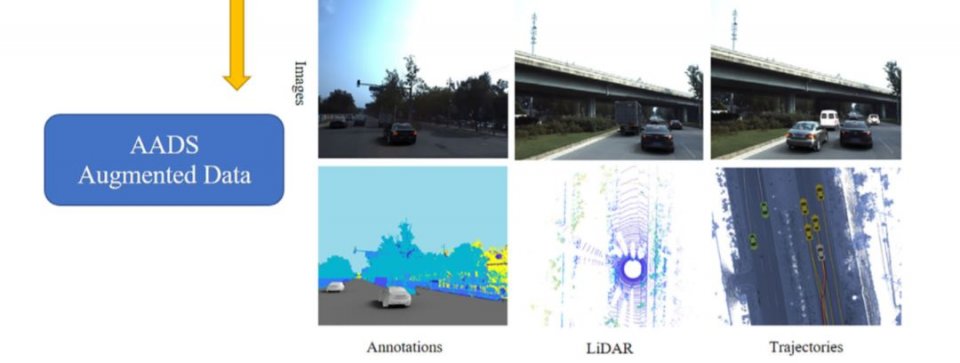
所以,一句話概括,“增強現實的自動駕駛仿真系統”,可自動創建逼真的道路場景,為自動駕駛車輛提供更為可靠且低成本的實驗室模擬方法。論文《基於數據驅動算法的,增強現實的自動駕駛仿真系統》研究的是一種突破性的仿真技術,發表在《科學》雜誌子刊《科學·機器人學》上也代表着該研究獲得學術界的認可。
關於論文的一些細節,《親愛的數據》出品人譚婧與論文的第一作者李偉展開了對話。
答:自動駕駛系統對安全性的要求極為苛刻。其中一個重要方面體現在,自動駕駛系統能在邊角案例(corner case)或者説極端場景依舊保持可靠,保證乘坐者和行人的安全。因此,可擴展性,即可以將現有的自動駕駛仿真系統擴展至多樣的、特定的、甚至極端的場景,並用於訓練、測試自動駕駛系統,是一個重要的、不可或缺的功能。
問題二:真實性(Realism)對自動駕駛任務為什麼重要?
答:現有的自動駕駛仿真系統都使用人工構建虛擬的場景,虛擬的交通用於訓練、測試自動駕駛算法。即便是花費大量的成本和時間,虛擬的場景據真實場景依舊存在不小的差距。差距越大,訓練和測試的自動駕駛算法在真實道路上存在的問題便越多越大。
問題三:仿真和現實的差距,技術能夠解決到什麼程度?
答:仿真和現實之間,從底層的傳感器仿真(CCD傳感器、LiDAR傳感器等)到上層的交通流仿真(行人和車輛等)都存在不同程度的差距。而這些差距,都可以通過不同的技術儘可能地縮小。對我們的系統而言,在大部分使用場景下,仿真和現實的差距已經被縮小到自動駕駛感知算法可接受的範圍。
答:我們系統仿真數據的特定在於真實,其核心在於實際採集的自動駕駛數據集ApolloScape。我們的自動駕駛數據集在數量、精度等方面在全世界範圍內也是領先的。仿真系統本身是比較龐大的,包括圖像仿真、激光雷達仿真以及車流移動仿真等,還需要一些更深的技術將整個系統加以完善。
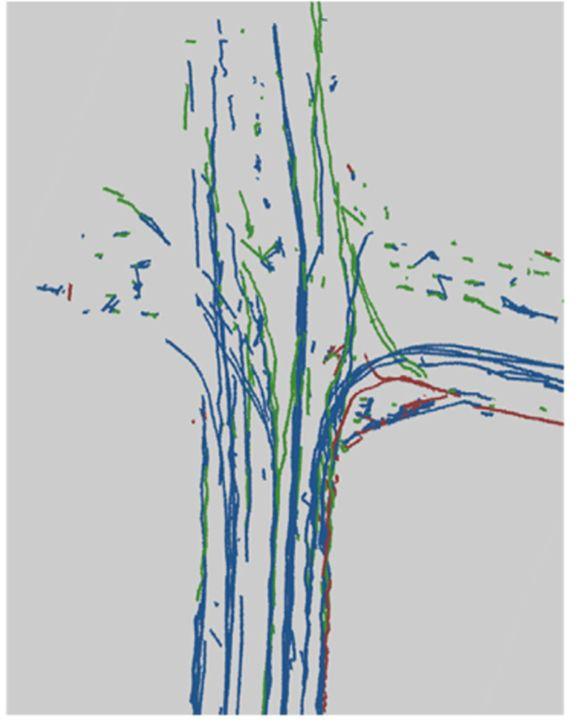
針對不同的仿真數據,我們有不同的仿真技術。在我們的系統中,針對圖像傳感器,使用了一種基於圖像渲染的技術,可認為針對圖像的一種特殊數據驅動方式;針對LiDAR傳感器,使用了基於模型和數據驅動的技術;針對交通流,使用了多代理的數據驅動技術。
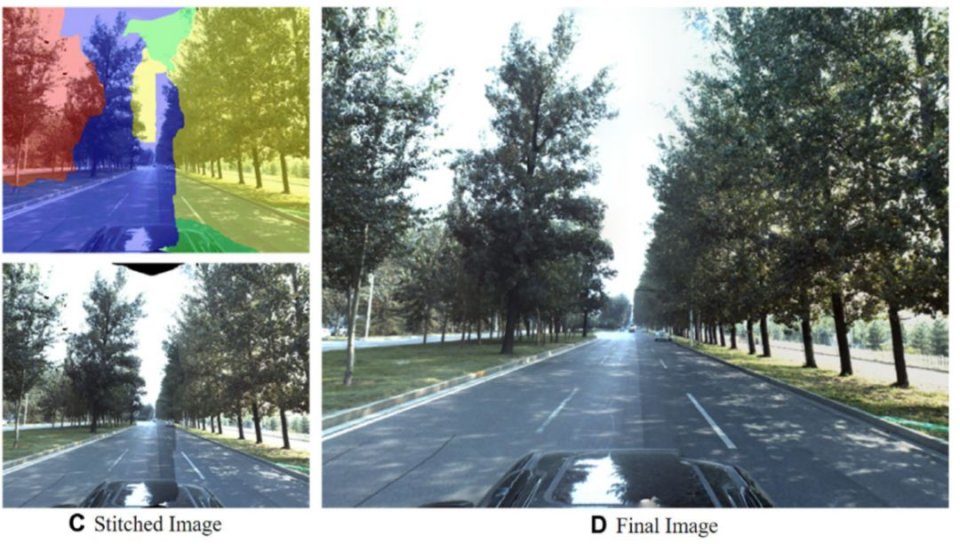
答:論文的突破點在於自動生成真實感的數據和構建可擴展的系統。基於已採集的數據,該系統可自動的生成逼真的道路場景和場景中複雜的駕駛員(車輛)與行人的相互影響與運動。簡而言之,即有效的還原了駕駛場景,併合成、組合形成了更多的駕駛場景。
問題六:為什麼少量圖像能實現?
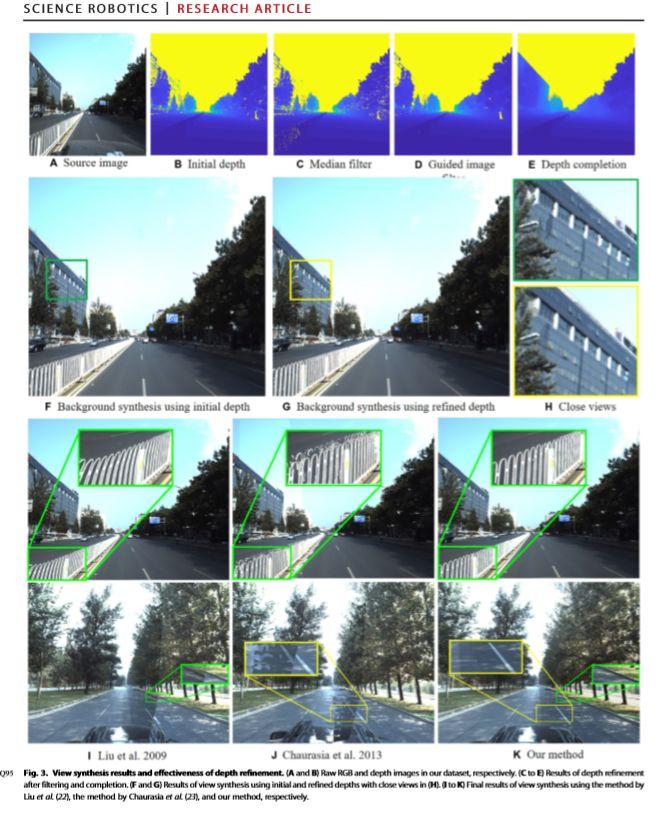
答:得益於全新開發的基於圖像渲染技術,包括該技術中的深度數據處理與優化技術、大基線視角外插技術等。我們的系統可在僅使用少量圖像便合成大量視角。
自動駕駛技術的前沿學術發展早已不是“閉門造車”時代,學術研究與自動駕駛的應用史無前例的“近”。楊睿剛博士同時也是百度機器人與自動駕駛實驗室的負責人。他認為,自動駕駛本身就是應用場景,該領域需要應用驅動型論文,也就是説,自動駕駛領域的論文應該超越純粹科研和學術。該研究已經部分應用在自動駕駛系統的仿真、驗證環節。