蘋果新推的dTOF究竟是什麼?_風聞
半导体行业观察-半导体行业观察官方账号-专注观察全球半导体最新资讯、技术前沿、发展趋势。2020-03-23 16:02
來源:內容由公眾號半導體行業觀察(ID:icbank)原創,作者:李飛,謝謝!
在最近發佈的iPad中,蘋果宣佈使用了dToF LiDAR技術,這一發佈讓dToF又成為了整個行業關注的熱點。本文將為讀者仔細分析dToF傳感器的技術和應用趨勢。
在分析dToF的技術和應用之前,我們首先需要釐清ToF的概念。
傳統來説,ToF(time-of-flight,飛行時間)的概念是紮根於深度傳感器的。這裏的深度傳感器是指採用像素陣列來獲取整個場景的高分辨率深度分佈。對於深度傳感器來説,一般用於測量深度的機制分別有結構光、雙目和ToF三種,其中結構光(iPhone目前的FaceID就是使用了基於結構光的深度傳感器)和雙目技術都是基於幾何原理做間接深度估計,而ToF則是測量發射光和反射光之間的飛行時間並根據光速來直接估計深度。
那麼在自動駕駛領域的關鍵技術LiDAR和ToF又有什麼關係呢?眾所周知,幾乎所有的LiDAR都是根據發射光和反射光之間的飛行時間來直接估計目標距離(因為雙目和結構光無論是距離還是精度和可靠性都無法應用在自動駕駛中),換句話説如果從測量原理來看所有的LiDAR都是ToF。那麼,ToF LiDAR這種説法是不是重複概念呢?事實上,在LiDAR語境裏的ToF傳感器主要強調的是可以通過高密度ToF傳感像素陣列來得到測量場景的高分辨率距離/深度分佈,主要是與傳統上只能獲得低密度點雲的線掃描式LiDAR作區分。
綜上,當我們在説ToF LiDAR的時候,事實上我們指的是那些基於測量發射和反射光之間的飛行時間來獲得高分辨率場景深度/目標距離分佈的傳感器。
dToF和iToF比較和半導體工藝
在釐清了ToF的概念之後,我們看到ToF又可以分為iToF(間接飛行時間)和dToF(直接飛行時間)兩類。這兩類ToF又有什麼區別呢?
dToF和iToF的原理區別主要在於發射和反射光的區別。dToF的原理比較直接,即直接發射一個光脈衝,之後測量反射光脈衝和發射光脈衝之間的時間間隔,就可以得到光的飛行時間。而iToF的原理則要複雜一些。在iToF中,發射的並非一個光脈衝,而是調製過的光。接收到的反射調製光和發射的調製光之間存在一個相位差,通過檢測該相位差就能測量出飛行時間,從而估計出距離。
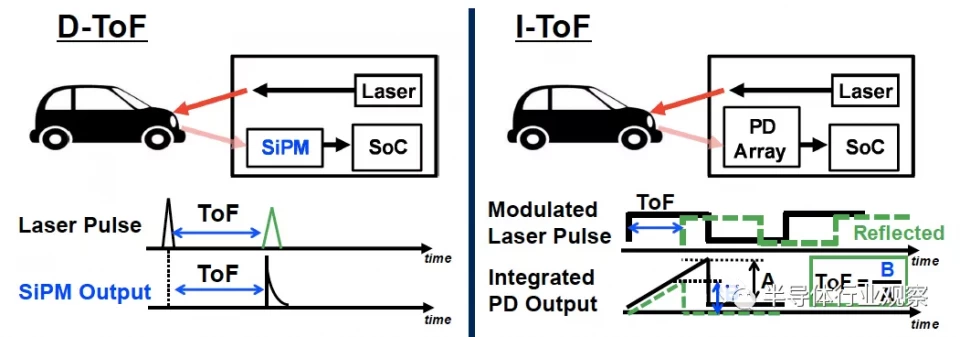
在具體的實現上,dToF相較於iToF來説難度要大許多。dToF的難點在於要檢測的光信號是一個脈衝信號,因此檢測器對於光的敏感度比需要非常高。常見的dToF傳感器實現是使用SPAD(single-photon avalanche diode,單光子雪崩二極管)。SPAD的工作區域位於二極管的擊穿區附近,當單個光子進入SPAD後就會產生大量的電子-空穴對,從而SPAD能檢測到非常微弱的光脈衝。從器件角度來看,SPAD的集成度要低於普通的CMOS光傳感器,因此dToF傳感器的2D分辨率傳統上較差。此外,從讀出電路來看,dToF需要能分辨出非常精細的時間差(通常使用time-to-digital converter,TDC來實現)。例如如果需要實現1.5cm的測距精度,則TDC的分辨率需要達到10ps,這一點並不容易。與之相對的是,iToF檢測的是調製光而非一個脈衝,在具體電路實現上通常會使用積分電路,因此可以使用工作在接近線性區域的普通CMOS光傳感器像素。由於CMOS傳感器像素的集成度很高,因此基於iToF的深度傳感器2D分辨率可以遠高於dToF,同時成本也可以較低。另一方面,iToF由於在檢測相位差的時候使用了積分,所以環境光也會在積分過程中對於iToF電路造成干擾,因此iToF在明亮環境下的性能會受到影響。
以上關於dToF和iToF的對比是針對傳統的技術而言。隨着近幾年深度傳感器和LiDAR的發展,dToF也得到了長足的發展。從光傳感器像素來看,dToF目前也可以使用CMOS工藝實現,並且已經可以實現不錯的2D分辨率。例如,在今年的ISSCC上,松下發表了一款使用65nm CMOS工藝實現的1200x900 SPAD dToF傳感器,其SPAD的像素集成度和傳統iToF的像素集成度已經在同一個數量級。此外,在TDC電路設計方面,隨着電路設計的進步,目前在CMOS電路中的TDC的時間分辨率精度也在逐步提升,這也為dToF的普及鋪平了道路。
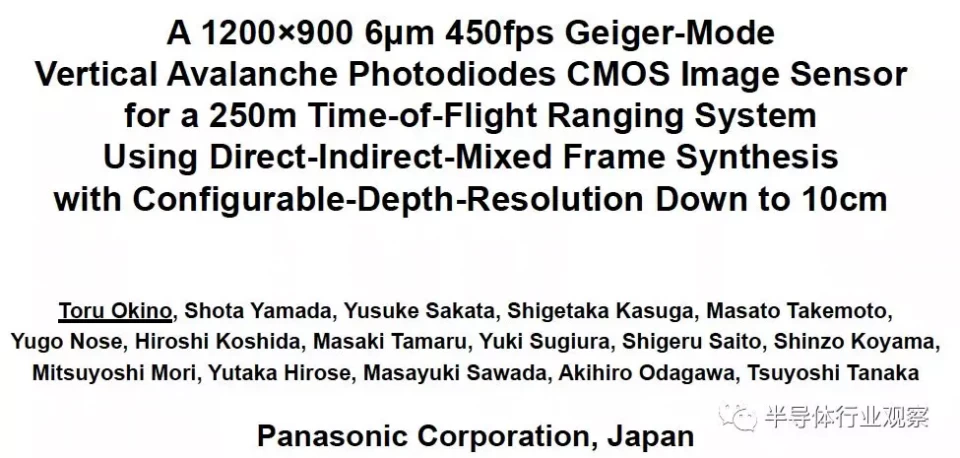
dToF的傳統熱門應用是車載LiDAR。如前所述,dToF在車載的LiDAR中主要實現的是高2D分辨率的測距。在車載應用中,dToF的關鍵指標包括測距距離、距離分辨率、2D分辨率以及抗干擾性。由於車載LiDAR對於測距距離(100m以上)和抗干擾性的要求,相關的ToF傳感器基本是dToF佔主導。目前,車載LiDAR dToF已經可以實現200m以上的測距距離,而在2D分辨率上已經可以實現1M以上的像素數。以上兩個指標的提升主要取決於器件工藝和激光光源,我們預計2D分辨率會在未來幾年內快速提升。除此之外,距離分辨率和抗干擾能力的提升則主要來自於電路系統和後端算法等的提升,該領域也是工業界和學術界的熱門研究領域,我們預期在未來幾年內會看到一些非常有趣的技術來提升這些指標。例如,今年松下發表的dToF LiDAR中,就使用了混合測距方法,即在遠距離使用dToF,而在近距離則使用iToF,從而保證在遠距離和近距離都有較好的測距分辨率。
除了汽車電子之外,對於dToF和SPAD來説一個新興的領域是消費電子。隨着ARVR等新應用的興起,消費電子領域對於深度傳感器的需求也在快速上升。消費電子領域傳統上是iToF的天下,因為傳統上在消費電子領域的應用中對於ToF傳感器的最大測距距離需求較低(數米之內),而對於2D分辨率和成本的需求則較高。然而,隨着dToF技術,尤其是高集成度CMOS SPAD的發展,我們看到dToF正在從高端進入消費電子市場。如前面的技術分析,對於消費電子應用來説,使用dToF的主要優勢是可以同時實現較遠的測距距離和較高的測距精度,因此當需要把測距距離擴展到10米以上時,dToF有可能會成為更好的選擇。此外由於dToF對於環境光干擾較不敏感,所以使用dToF可以讓智能設備的深度傳感工作在不同光照強度的場景下。此番蘋果的下一代iPad選擇使用dToF,除了在測距精度和抗干擾的考量之外,估計也是因為希望能繼續擴大測距範圍,從而為下一代ARVR應用鋪平道路。另一方面,我們也看到iToF技術一直在進步,希望通過算法和電路設計來提升iToF系統的測距精度/測距距離/抗干擾能力,因此如果消費電子的測距範圍能控制在10m左右的範圍內,iToF也未必會輸給dToF。未來消費電子領域究竟是dToF還是iToF佔主導,目前還難下定論。
對未來半導體行業的影響
隨着dToF在汽車電子和消費電子領域的普及,我們認為SPAD和相關的半導體技術會得到更多重視。首先就是SPAD像素和相關的工藝設計。目前,SPAD已經可以在CMOS實現,但是其集成度(即pixel pitch)仍然有提升空間。在這一點上,我們看到日本的相關半導體公司(如松下等)擁有較領先的技術,並且由於這些半導體公司長期以來在CMOS圖像傳感器領域的積累,我們認為在接下來的幾年內他們很有可能繼續領跑這個領域。
除了傳感像素之外,另一個相關的領域是3DIC。CMOS圖像傳感器是3DIC最早得到大規模應用的領域之一,因為在這個領域中CMOS像素的輸出需要大量的後續信號處理,而實現CMOS像素的半導體工藝往往和實現後續信號處理電路的半導體工藝並不相同,而且兩者之間還需要大量的IO接口帶寬,因此使用3DIC技術將CMOS像素晶片和信號處理晶片集成到一起是一個非常合理的選擇。隨着SPAD像素的集成度上升,我們認為也會有為SPAD集成度/性能/成本專門優化的工藝出現,在這樣的情況下使用3DIC技術集成SPAD晶片和信號處理芯片將會逐漸成為主流。