iphone12的激光雷達,“就連NASA也會在下次火星登陸中用到它”?_風聞
行星事务所-行星事务所官方账号-2020-10-16 15:33
昨天凌晨的蘋果發佈會上,蘋果宣佈給iPhone 12 Pro加上了LiDAR(常常被翻譯為**“激光雷達”**),可以與相機鏡頭相結合,讓iphone能夠更好地獲取拍攝圖幅中的遠近信息。事實上,更早之前的iPad Pro也已經用上了LiDAR。

iphone 12 pro的LiDAR掃描儀 | 蘋果官網
更會玩的是,蘋果這回還蹭了一把火星車的熱度,表示這是“下一次火星着陸任務中將會用到的技術”“上得火星,入得客廳”。格調直接拉滿了。

iPhone 12 Pro的LiDAR介紹 | 蘋果官網
“就連NASA也會在下次火星登陸中用到它”▼

iPad Pro的LiDAR介紹 | 蘋果官網
聽起來好像直逼航天科技前沿了呀…其實…嗨…且不説LiDAR技術用於航天探測已經不知道多少年了,下一次火星任務真的用了這個技術麼?
激光雷達?激光還是雷達?
LiDAR這個詞其實在深空航天和地球遙感等領域都廣泛使用,這帶來了一些尷尬——有時候大家看到一樣的詞,理解到的意思卻完全不一樣。
這是有歷史原因的。
大家可能知道,雷達(RADAR)這個詞誕生於1940年左右,原本是個英文詞組的縮寫:r****adio detection and ranging,意為“無線電探測和測距”。最開始主要用於軍事,後來慢慢普及,變成了一個普通單詞radar,不再用大寫標註。中文的“雷達”是直接的音譯,沒有體現出這個複雜的意思。

“雷達”一詞的起源 | Owen Bishop, in Understand Electronics (Second Edition), 2001
雷達測距的原理很簡單,通過主動發射和接收某些頻段電磁波,測量信號往返時間,來反算目標的位置、速度、大小等信息。這個電磁波,主要指無線電(radio)和微波(microwave)波段,別忘了雷達的r就是radio的意思。

電磁波各波段。雷達以無線電和微波波段為主,LiDAR以近紅外、可見光和紫外波段為主 | 維基
而LiDAR這個詞則誕生於激光器的發明之後,最開始是光(light)和雷達(radar)兩個詞的合成詞,是全稱COherent Light Detecting And Ranging(相干光探測與測距,CILiDAR)的縮寫,完全用了雷達(RADAR)的構詞模式,因此也被翻譯為“激光雷達”或者“光學雷達”。直接意思可以理解為**“用雷達那樣的方式探測,只是把雷達波段的電磁波換成了波長更短的激光波段的電磁波”**,但實際上這裏的“雷達”已經悄然從“探測波段+探測手段”變成了“探測手段”,意思上直接給瘦了個身。

飛行時間法(TOF)激光測距基本原理,利用發射&接收激光束的往返時間來推算目標物的距離、位置、大小等參數。發射/接收裝置的距離很短或者不動的話,可以認為光是以幾乎相同的角度發射和接收的 | 維基
總結來説:激光雷達(激光探測和測距)和雷達(無線電探測和測距)探測原理相似,但使用的波段不同,發射接收裝置不同,使用場合也不同。
如今的LiDAR作為Light Detecting And Ranging(光探測與測距)的縮寫,其實直譯來説完全沒必要出現“雷達”這樣的字眼,反倒是有些地方縮略翻譯成“光達”倒是頗得“雷達”這個譯法的精神。只能説“激光雷達”這個譯法有歷史原因,倒也可以理解。只是隨着激光和雷達的使用場合越來越豐富,時不時還是會帶來一些誤解。
地形探測好幫手LiDAR
激光和雷達都能測距和測高,而且在深空探測中各有不同的使用場合,所以在深空探測領域常常會把激光測距和雷達測距完全區分開使用。
金星和土衞六這樣被厚厚大氣層覆蓋的天體,波長較短的“光”幾乎透不進去,所以這樣的天體獲取表面地形數據只能用雷達測高。
麥哲倫雷達測高計獲取的金星(近)全球地形數據▼

高程為距質心距離 | NASA/JPL/USGS
卡西尼號雷達探測獲取的土衞六(部分)全球地形數據▼

土衞六全球地形圖,參考面為土衞六海水面所在的大地水準面,全球分辨率1°×1° | 來源:[1]
而對於月球、火星、水星這樣幾乎沒有大氣層的天體,激光測距的定向性更好、分辨率更高,總之更好使。實際使用激光測距技術時時也不會用“激光雷達”這樣的表達,而是直接把LiDAR翻譯為“激光測高計”或者乾脆英文都直接使用“激光測高計”(Laser Altimeter)這樣的描述。

行星探測領域:LiDAR = 激光測高計
1994年的克萊門汀探測器激光測高獲取的月球全球地形圖▼
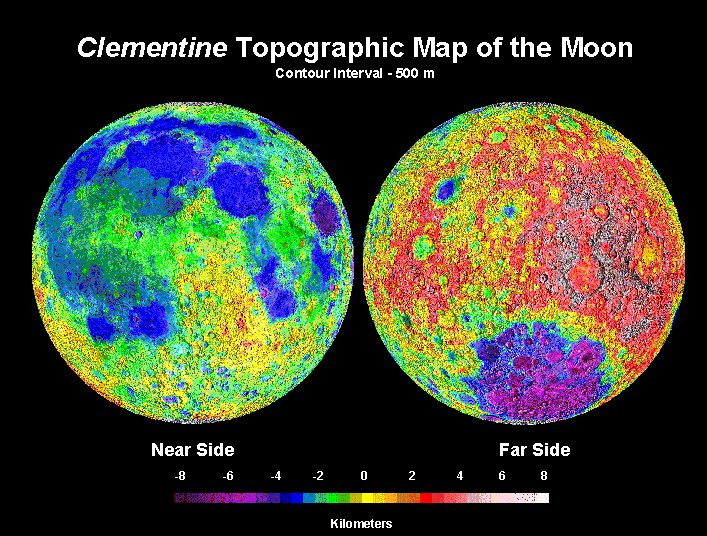
來源:Brian Fessler and Paul Spudis, LPI
2007年的嫦娥一號探測器的激光高度計和激光測高獲取的月球全球地形圖▼


來源:新華社 & 中國科學院國家天文台/探月工程地面應用系統
1997年的火星全球探勘者號(MGS)和2009年的月球勘測軌道飛行器(LRO)則用各自攜帶的MOLA測高計和LOLA測高計,為火星和月球貢獻了迄今為止最高分辨率的全球高程地圖。


MGS和LRO探測器激光測高獲得的火星(上)和月球(下)全球地形圖 | NASA
地球更是有專注於測高的人造衞星,我們常常稱之為測高衞星。典型的激光型測高衞星例如NASA的ICESat和ICESat-2,各自攜帶的唯一儀器就是機載LiDAR——分別叫地球科學激光測高計系統(GLAS)和高階地形激光測高計系統(ATLAS),主要目標是測量冰蓋高度和海冰厚度。


(上)ICESat的GLAS測高系統工作原理示意圖 | NASA/Deborah McLean (下)ICESat-2的ATLAS測高系統獲取的2003-2019年南極冰蓋厚度的增減。中心的空白是極軌衞星的軌道星下點空白 | Smith et al./Science
着陸過程中的強輔助LiDAR
對於着陸型探測任務,激光測距儀更是常見配置。JAXA的小行星“龍宮”採樣返回任務隼鳥2號攜帶的四大科學儀器之一就是LiDAR。(詳見:JAXA隼鳥2號科學儀器全解讀)
隼鳥2號的LiDAR。激光光束經擴束器放大後發出,再衝小行星表面反射回來。通過測量往返時間來計算探測器到龍宮表面的距離 | JAXA
LiDAR連續掃描小行星,記錄下探測器到每個掃描點的距離,這些測距信息結合光學ONC相機拍攝的龍宮表面照片,就可以幫助隼鳥2號建立更高質量的全球三維地形模型。
隼鳥2號LiDAR結合光學相機影像獲取龍宮全球三維地形信息 | JAXA
是不是跟蘋果的LiDAR掃描挺像的?

(上)隼鳥2號的LiDAR和小行星“龍宮”掃描點雲 | JAXA (下)iPad Pro探測點雲示意圖 | 蘋果宣傳片
除了用來獲取全球地形數據之外,測距還會用於探測器着陸過程的導航定位,幫助探測器在降落過程中實時掌握與地表的距離,這對探測器的安全着陸至關重要。隼鳥2號在着陸採樣過程中就是以激光測距作為主導航定位手段的。
實際操作中,隨着距離小行星表面越來越近,LiDAR接收激光的敏感度也會隨着距離變化。隼鳥2號針對不同高度採用了兩種激光測距手段:50米高度以上使用常規的LiDAR激光測距,50米高度以下,系統會根據接收激光的敏感度有一次自主調節,從常規LiDAR切換到近距離激光測距LRF。

2019年5月30日,隼鳥2號為第二次着陸採樣的演習PPTD-1A中丟下標記球的過程,圖中時間是日本時間 | JAXA [2]
激光測距在隼鳥2號的兩次着陸採樣和多次下降觀測中立下了汗馬功勞,隼鳥2號的第二次着陸採樣點甚至只偏離了預定着陸點區中心60釐米!(第一次是差了1米)

(左)JAXA隼鳥2號第二次着陸點(藍點)和計劃着陸區C01-Cb的中心(綠點)的位置;(右)隼鳥2號採樣杆接觸點的位置(黃圈)| JAXA [3]
激光測距也在我國嫦娥三號、四號的落月過程中起了重要作用。兩個着陸器都攜帶了由上海技物所研製的激光測距敏感器和激光三維成像敏感器,前者用於降落期間的測距,從距月面約15公里處開始工作,後者與激光測距儀協同工作,用於懸停避障階段的月面特徵識別和避障,在距月面約100米處的懸停操作階段工作。

嫦娥三號、四號激光測距工作示意圖 | 中科院 [4]
和隼鳥2號的LiDAR類似,NASA的小行星“貝努”採樣返回任務OSIRIS-REx(冥王號)攜帶的激光測高計(OLA)也是LiDAR掃描儀,它幫助冥王號在環繞小行星貝努的一年多時間裏,建立了貝努全球的高清三維地形模型。

(左)冥王號的激光測高計(OLA)| 加拿大宇航局 (右)OLA獲取的小行星貝努3D地形模型,越紅越高,越藍越低 | NASA/University of Arizona/CSA/York/MDA
冥王號起初也是打算使用LiDAR作為着陸採樣階段的主導航定位技術來着:除了掃描式LiDAR——激光測高計(OLA),冥王號還配備了一台3D快閃LiDAR用於降落過程中的測距和定位。

掃描式LiDAR vs 快閃式LiDAR | 參考文獻 [5]
冥王號用於輔助降落的快閃LiDAR長這樣▼

冥王號的ASC LiDAR | 參考文獻 [6]
然而到地兒一看才發現,貝努表面超出預料地崎嶇多石,探測器根本沒地兒下腳採樣杆,冥王號團隊不得不把安全着陸區範圍從原計劃的50米直徑縮小到了16米直徑。為了落得更準,NASA最終放棄了LiDAR,改用了另一套基於光學影像的備用導航定位方案——自然特徵跟蹤(Natural Feature Tracking,NFT)技術。冥王號在降落過程中不斷實時拍攝着陸區附近的照片,用這些照片和已有的三維地形和影像數據庫比對,匹配着陸區一帶的特徵石塊作為地標,就可以更新自己的實時位置和計劃採樣位置,如果檢測到拍攝的影像裏有危險障礙物還可以自主撤離 [7]。

冥王號的自然特徵跟蹤(NFT)技術 | © NASA/Goddard/University of Arizona [7] 漢化:@haibaraemily
冥王號探測器已經在兩次着陸採樣演習中驗證了NFT技術的可靠性,也將在10月20日的實際着陸採樣過程中使用這種技術輔助精確着陸。

使用自然特徵跟蹤(NFT)技術下降中的冥王號探測器示意圖 | © NASA/Goddard/University of Arizona [7]
毅力****號降落過程真的會用LiDAR嗎?
那蘋果所説的NASA下一個火星任務,正在路上的毅力號火星車呢?無獨有偶,為了落得更準更安全,NASA其實也早已決定在毅力號險象環生的“恐怖七分鐘”着陸過程裏啓用基於光學影像的新技術了。
毅力號火星車這次啓用的降落導航新技術叫相對地形導航(Terrain Relative Navigation,TRN),本質上和冥王號的自然特徵跟蹤(Natural Feature Tracking,NFT)技術類似,都是基於探測器降落時實時拍攝的着陸區光學影像匹配數據庫,不斷更新自己的位置(定位精度優於40米)。這種方法可以幫助探測器避開着陸橢圓內的小尺度障礙,更靈活地選擇着陸點。
毅力號基於TRN技術的降落避障過程示意圖 | NASA/JPL-Caltech [8]
那毅力號火星車接下來的着陸過程中會不會用到LiDAR呢?我認真查了一下,發現還真説不準…
相對地形導航(TRN)技術的實現,靠的是高精度的地圖數據庫系統。在毅力號出發之前,NASA就將着陸區一帶迄今為止最高清的地形和影像地圖輸入了毅力號的着陸器視覺系統(Lander Visions System,LVS )中。這套系統將作為毅力號着陸時“腦子”裏的火星真實地形地貌參考。

毅力號LVS系統搭載的着陸區一帶HiRISE可見光影像(25釐米/像素)和地形(1 米/像素)數據 | NASA
根據目前NASA公開的資料來看,2012年LVS系統概念最初包含三個主要部分:用於識別特徵地標的相機、用於近表面障礙識別和整個下降過程中測距的快閃LiDAR,和慣性測量裝置(IMU)[9]。

NASA在2012年提出的LVS系統概念 | 參考文獻 [9]
按當時的設計,慣導(IMU)、相機(camera)和LiDAR共同作為毅力號的着陸器視覺系統(LVS )的一部分,為相對地形導航(TRN)服務。

NASA在2012年提出的LVS系統概念 | 參考文獻 [9]
然而,到2017年NASA JPL公佈的LVS系統設計裏,只剩下慣導和相機了,LiDAR似乎沒有了 ,至少沒有體現[10]。



NASA JPL在2017年公佈的LVS系統設計 | 參考文獻 [10]
NASA JPL在2018年國際行星探測研討會(IPPW)上明確表示下降過程中的測距部分由好奇號降落時使用的基於雷達測距的終端降落傳感器(TDS)系統來完成 [11]。


NASA JPL在2018年國際行星探測研討會(IPPW)上公佈的毅力號計劃EDL降落方案 | 參考文獻 [11]
這也和NASA官網最終公佈的毅力號降落過程介紹一致:基於雷達測距的TDS系統結合基於光學影像為主的LVS系統共同為基於相對地形的TRN導航系統提供數據支持 [12]。
也就是説,至少基於目前公佈的資料來看,即使毅力號最終確實採用了LiDAR測距系統,也只是作為LVS系統中的一個輔助測距系統,而且似乎也不一定有。
唉,這樣算來,其實好像只有隼鳥2號是真正在着陸採樣過程中使用了LiDAR為主導航技術呢。
不過,NASA確實正在研發一項基於多普勒LiDAR的高精度集成輔助降落技術(其中也包括TRN),將來或許真的能廣泛使用於月球和火星的着陸任務。這個技術有個很長很迷的名字——“安全和精確着陸-綜合能力演化”項目 ,簡稱SPLICE。接下來的藍色起源任務以及阿爾忒彌斯任務的一部分商業着陸任務將擔當測試SPLICE項目的小白鼠 [13]。
,簡稱SPLICE。接下來的藍色起源任務以及阿爾忒彌斯任務的一部分商業着陸任務將擔當測試SPLICE項目的小白鼠 [13]。

多普勒LiDAR發射激光束示意圖 | NASA
但可能蘋果還是覺得火星的技術更加高大上吧…(攤手)
致謝
本文感謝Dr. Yuzhen Cai的審稿~
參考文獻
[1] Corlies, P., Hayes, A. G., Birch, S. P. D., Lorenz, R., Stiles, B. W., Kirk, R., … & Iess, L. (2017). Titan’s Topography and Shape at the End of the Cassini Mission. Geophysical Research Letters, 44 (23).
[2] http://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190611_ver6a.pdf
[3] http://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190725_ver9.pdf
[4] 嫦娥三號“收官”:中科院任務執行完美http://www.cas.cn/zt/kjzt/ce3/jzjd/201312/t20131218_4000933.shtml
[5] Dissly, R., Weimer, C., Masciarelli, J., Weinberg, J., Miller, K., & Rohrschneider, R. (2012, October). Flash lidars for planetary missions. In Workshop on Instrumentation for Planetary Missions.
[6] Bierhaus, E. B., Clark, B. C., Harris, J. W., Payne, K. S., Dubisher, R. D., Wurts, D. W., … & May, A. J. (2018). The OSIRIS-REx spacecraft and the touch-and-go sample acquisition mechanism (TAGSAM). Space Science Reviews, 214(7), 107.
[7] Bennu’s Boulders Shine as Beacons for NASA’s OSIRIS-REx
https://www.asteroidmission.org/?latest-news=bennus-boulders-shine-as-beacons-for-nasas-osiris-rex
[8] New Technologies for Mars Exploration
https://mars.nasa.gov/mars2020/mission/technology/
[9] Johnson, A. E., & Golombek, M. P. (2012). Lander vision system for safe and precise entry descent and landing. LPICo, 1679, 4341.
[10] The Mars 2020 Lander vision system: architecture and I&T results
https://trs.jpl.nasa.gov/handle/2014/48016
[11] DSENDS Simulation of Mars 2020 Entry, Descent, and Landing
https://www.colorado.edu/event/ippw2018/sites/default/files/attached-files/modsimvalid_3_burkhart_presid558_presslides_docid1000.pdf
[12] Mars 2020 | Entry, Descent, and Landing
https://mars.nasa.gov/mars2020/timeline/landing/entry-descent-landing/
[13] Technology Developed for Lunar Landings Makes Self-Driving Cars Safer on Earth
https://www.nasa.gov/feature/technology-developed-for-lunar-landings-makes-self-driving-cars-safer-on-earth
