交大團隊研製深海重載作業採礦車圓滿完成海底智能行進與路徑跟蹤試驗_風聞
若爱z愿化雪-2021-05-23 16:52
2021年4月,上海交通大學海洋工程團隊研製的深海重載作業採礦車樣機,搭載於“張謇”號科考船,在我國南海圓滿完成了海底智能行進與路徑跟蹤試驗,通過海上布放回收、水下精準定位、海底作業路徑規劃、智能行進控制等一系列試驗,驗證了海上布放回收姿態自動控制、海底智能自主行進控制等創新技術,達到了預期研究目標。
該深海採礦車以深海多金屬結核為開發作業對象,長5.6米,寬2.5米,高2.0米,空氣中重量8.0噸,設計作業水深3000米,具有海底作業環境感知、智能自主控制、高效水力集礦等作業能力。
採礦車布放入水
採礦車布放入水
為滿足未來海底礦產資源工程開發的需要,項目組前瞻性研發採礦車智能自主行進技術,實現採礦車海底行進過程中的閉環反饋控制,基於規劃的作業路徑和水下精確定位信息,實時、智能控制採礦車行進方向、位移和速度等運動姿態,首次實現採礦車海底大麴率曲線路徑高精度跟蹤。圖2為採礦車實時行進軌跡與S形規劃目標路徑對比,兩者高度吻合,最大跟蹤誤差僅0.40m。圖3為ROV聲吶測得的海底試驗現場,採礦車S形軌跡清晰可見。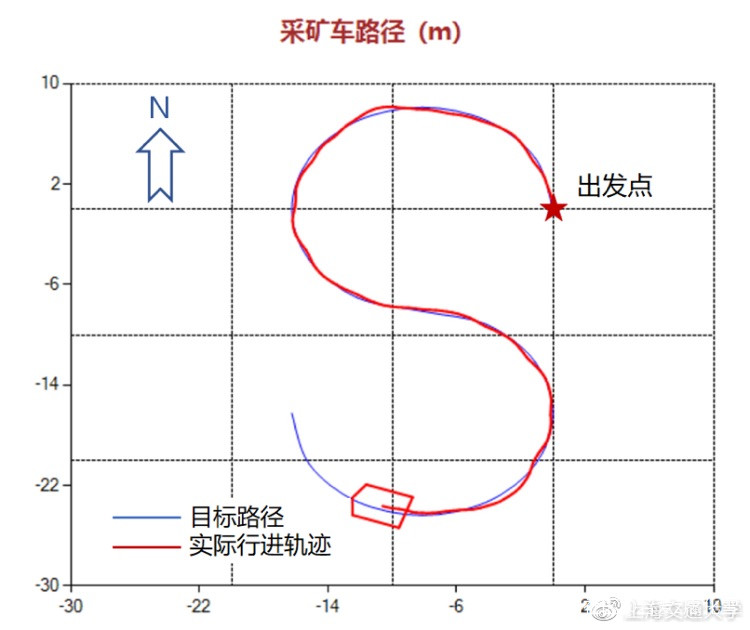
採礦車實時行進軌跡
採礦車實時行進軌跡
ROV聲吶測量採礦車軌跡
ROV聲吶測量採礦車軌跡
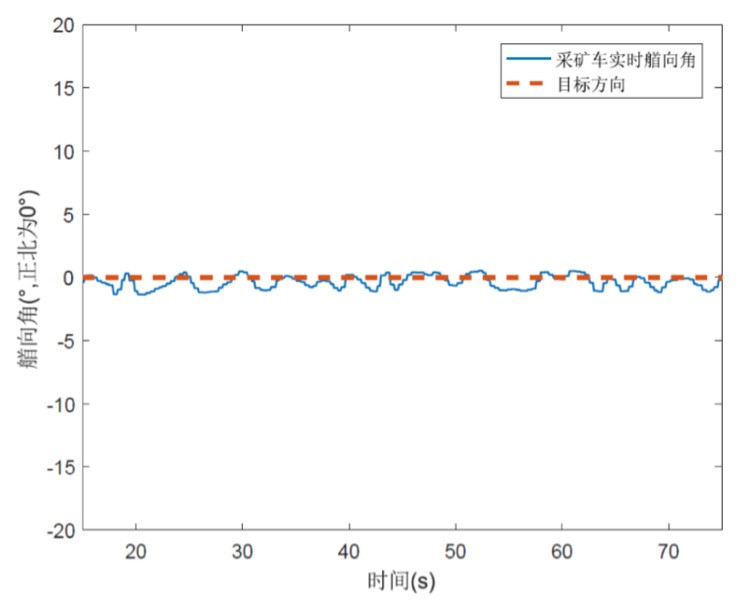
針對重載作業採礦車海上安全布放和回收難題,項目組創新提出了採礦車水中運動姿態自動控制方法,實時控制推進器推力分配,在海上布放和回收過程中,自主、穩定保持艏向角方向。在此次海試的多次布放和回收過程中,採礦車在高速海流作用下,艏向角控制最大偏差小於1.4度,實現了採礦車在水中運動姿態的精準控制,保障採礦車可控、穩定地布放與回收。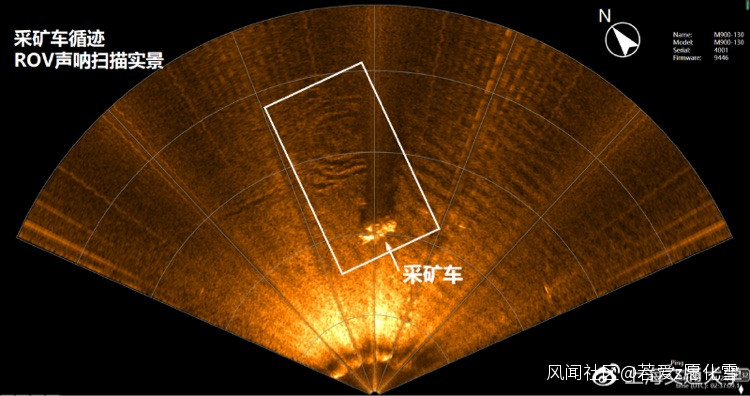
 採礦車布放姿態控制
採礦車布放姿態控制
採礦車布放姿態控制
採礦車首向角控制時間歷程
採礦車首向角控制時間歷程
在此次海試過程中,受今年第二號超強颱風“舒力基”影響,試驗海域達四級海況,出現嚴重低頻湧浪,給採礦車布放回收、船舶定位、人員操作、採礦車作業等帶來很大挑戰。項目組克服重重困難,團結奮戰,圓滿完成了全部試驗任務。
項目組團隊自三亞崖州灣啓航執行海試任務