歡迎來到機器人動物園!_風聞
新发现杂志-《新发现》杂志官方账号-2021-05-27 18:09
這些美麗的發明,是工程師為製造性能更優越、能耗更低的工業設備而進行的探索。請跟隨我們的腳步,走進機器人動物園。
我呆呆地站在地上,目瞪口呆地望着從頭頂飄過的龐然大物。
那是一隻身體裏充滿氦氣,長約3米的蝠鱝,它的銀色雙翼輕輕拍打着周圍的空氣,極其優雅地在空中游動,唯有其蒙皮發出的沙沙聲和電動肌肉發出的噝噝聲才透露了它機器人的真實身份。
這款仿生機器人是德國費斯托公司(Festo)的完美力作。
然而,費斯托公司既不是玩具製造商,也不是人工智能專家,主營業務是製造那些用於在生產線上高速焊接、固定、切割、打洞的工業機械,它們和機器魚又有什麼關係呢?


公司公關部負責人帕米拉·貝爾納(Pamela Berner)解釋説:“我們一直致力開發性能優越且耗能較少的機器。為此,我們從動物運動中尋求啓迪。事實上,在長久的進化過程中,大自然有足夠的時間將動物們的運動機能調整到最優狀態。”
模仿動物,明智之舉
十幾年來,該公司的工程師們便忙於製造各種機器動物模型:企鵝、水母、鳥、魚,以及象鼻等。


規則是,每件模型必須帶來一項或多項工業應用。就拿眼前這條蝠鱝來説,它那舞動的雙翼催生了一種高效的機械鑷子,能分毫不差地抓取微小的物品!
同樣在這個模型的基礎上,費斯托的工程師們完成了他們的頂級作品——飛鳥機器人!

遺憾的是,公司將這些作品視若珍寶,不肯輕易展示,只有在專業沙龍或展會上,你才能不時地瞥見一件兩件。

與此相比,我們接下來為你呈現的,將是一個彙集該公司多項創造的機器人動物園!
象鼻

人類和機器的歷史性握手。
工程師受大象鼻子啓發創造出的“象鼻機械手”能夠惟妙惟肖地模仿其原型流暢輕柔的招牌動作。
即使這個機器象鼻不小心撞到了你,也不會對你造成任何傷害。

費斯托公司認為,這項發明未來不僅可以用在工業領域,而且改進後,還可用在很多機器與人類有直接接觸的地方,如醫院、實驗室等。

機器象鼻的頂端安裝了一個固定在活動軸上的三指機械手。在抓握微小物體時,質地柔軟的“手指”能隨物體輪廓改變形狀,使操作變得更妥帖。

目前已有兩家企業配備了這款“象鼻機械手”,費斯托公司不願透露企業的名字,但經我們調查得知,其中一家在荷蘭,使用“象鼻機械手”挑選鬱金香球莖;另一家為德國某巧克力公司,“象鼻機械手”被用於蛋形巧克力裝盒。
工作原理:
“象鼻”由3根並排的空心圓管組成,它們就相當於肌肉。向其中一根圓管充氣,由聚酰胺(通稱“尼龍”)材料做成的氣囊就會膨脹,於是圓管隨之伸長。
充氣圓管伸;長空心圓管
但由於它同時還受另2根並未充氣的圓管的牽制,因此便會彎曲。此時只要在另一根圓管內也注入空氣,就能方便地控制“象鼻”朝上下左右各個方向轉動。
更妙的是,“象鼻”可以隨意彎曲扭轉,因為它是由3組這樣的構件頭尾相接而成的,這9塊“肌肉”每3塊一組地發生作用。機械壓力傳感器測量每個銜接處的拉力,並將數據傳至電腦,由電腦控制向各條圓管柱充氣或放氣。
海鷗

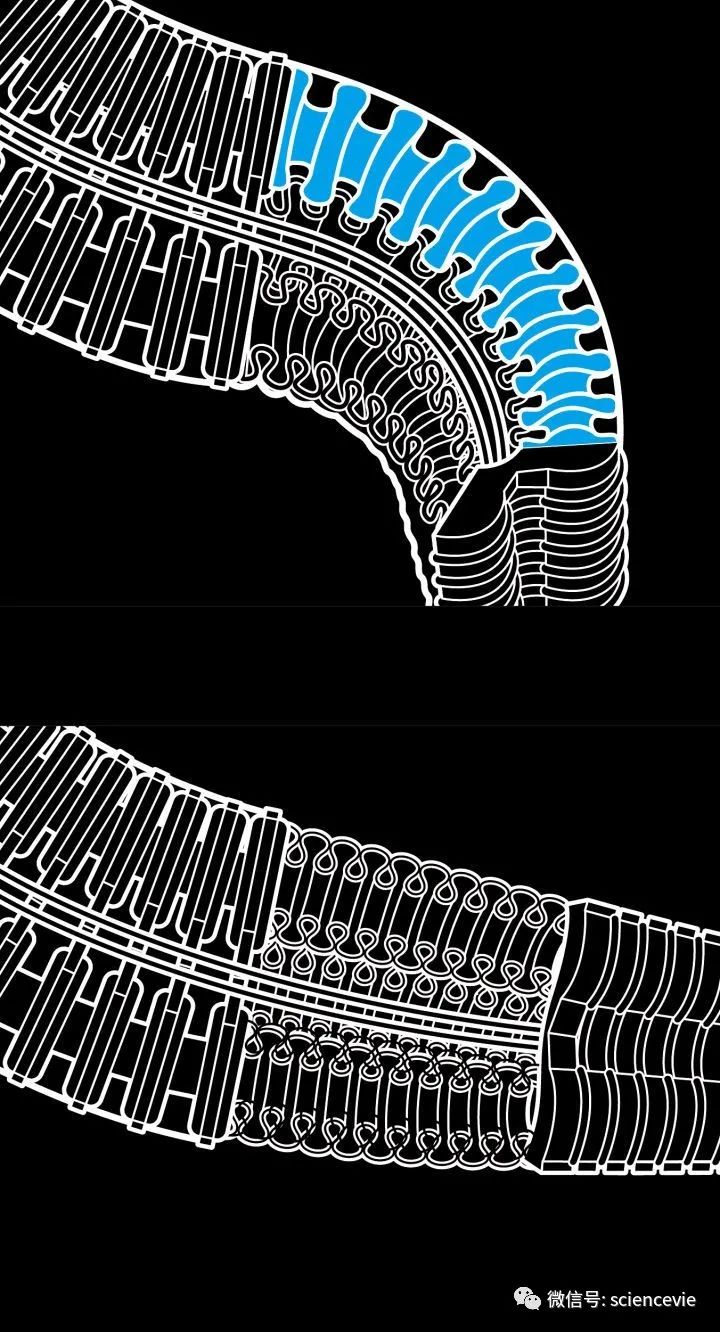
“智能鳥”(SmartBird)是費斯托公司機器動物陣營中最先進的一款。它不用氦氣,而是像真正的鳥類那樣揮動翅膀,足以以假亂真。這款神奇的機器鳥不但可以飛行、滑翔,還可以獨立完成起飛和降落的動作。
不僅如此,它還會根據風向情況和氣壓變動進行實時自我調整。遙控器僅對大方向進行控制。對於費斯托公司的節能目標來説“智能鳥”使這個願望得到了完美的實現。

想維持它的飛行狀態,只需23瓦電力,功耗僅相當於一隻節能燈泡。
工作原理:
“智能鳥”主要由塑料和碳纖維構成,形似海鷗的外殼僅重26克!

內置齒輪控制翅膀的揮動
為儘量減輕鳥身的重量,其內部構造非常簡單,僅有一個內置的齒輪系統用於控制翅膀的揮動。位於翅膀尖端的迷你馬達則用於控制雙翼向前或向後輕微旋轉,以推動“智能鳥”前進。內置電腦可精確地實時協調翅膀的運動,確保其飛行動作流暢。
梭魚


梭魚是費斯托公司最初作品之一,與其他機器動物相比較為原始。其主體是一個巨大的空腔,可通過往裏注水或充氣來控制魚身的沉浮。多餘的空氣可通過與口部齊平的小孔排出。
工作原理:
兩塊巨型充氣“肌肉”實現擺尾動作,魚兒因而能不斷前行。魚尾就像船舵,控制着魚兒的前進方向,兩塊藏於體側的“肌肉”能夠控制其角度,實現華麗轉身。
企鵝

在費斯托公司的眾多機器動物中,企鵝是蝠鱝的直系後代。像蝠鱝一樣,企鵝紡錘形的身體中充滿了氦氣,以保證其在空中的浮力,而揮動的雙翅則負責前進的動力。

兩者的明顯區別是企鵝可以後退,而且無需操作員!在地基電腦系統的監控下,企鵝可以與其他同型機器人一起自在遨遊,且不會相互碰撞。

這是因為工程師在企鵝身上安裝了超聲波發射與接收裝置,使它們得以互相定位。
另一些地基超聲波發射器則能根據電腦指令構建起一道禁止企鵝跨越的虛擬屏障,從而把它們關進一個隱形空中水族館。
工作原理:
企鵝翅膀內,有一根在引擎作用力下上下襬動的硬質拉桿。由於這根拉桿並非位於翅膀中間,而是翅膀前端,因此當拉桿從下往上抬升的時候,翅膀前緣會先於後緣抬起;同樣,當拉桿從上往下降的時候,翅膀前緣會首先下降。
伺服電動機可以把拉桿末端推向翅膀的前緣或後緣
如此催動雙翅,企鵝便能不斷前進。那麼又如何使之倒退呢?這就再簡單不過了,只要再裝一個引擎,把拉桿末端扯向翅膀後緣即可。這樣,當企鵝拍動翅膀的時候,就能倒退了。
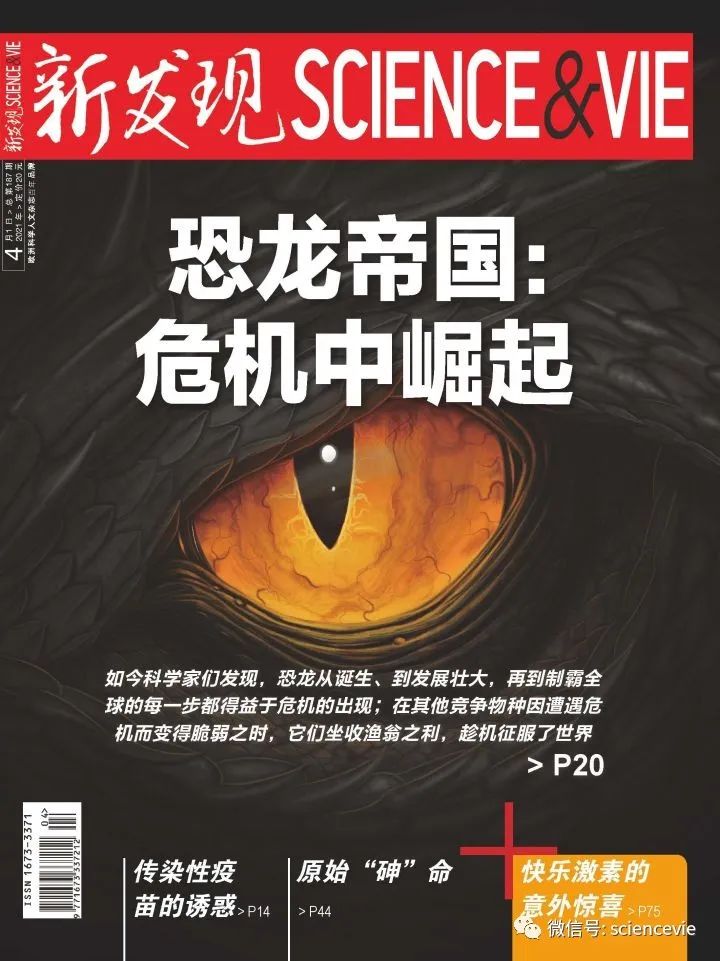
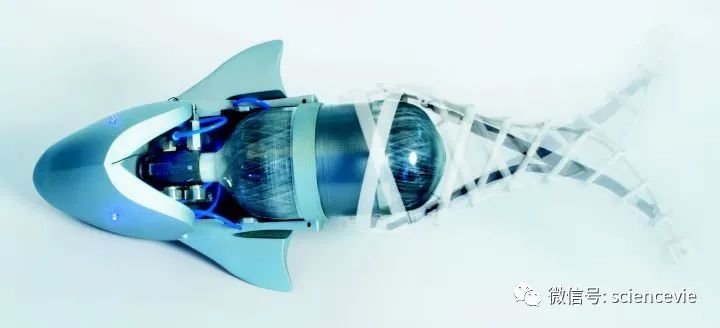
蝠鱝

這款名為Air-Ray的機器人是費斯托公司研發的第一批原型機之一。蝠鱝的身體中充滿了氦氣,以便能在空中飛行。此款機器人的設計宗旨是為了展現鰭條效應(Fin Ray effect)的高效推動力。

藉助其內部異常簡單的機械構件,該機器人能夠模仿蝠鱝魚鰭的運動,從而在各種流體環境中“如魚得水”。尾鰭上的配重只在機器人升降時起作用。機器蝠鱝可以遠程遙控,但遙控者必須分別操控每個引擎,因此操作起來很是複雜。

該裝置的高效性得到驗證後,費斯托公司把“魚鰭”配在漏斗末端,作為一個活動部件。當小球(或其他我們想篩選的小物件)進入漏斗,攝像頭就會對物體進行識別,決定究竟該投放在哪個貨籃裏。
在引擎的作用下,“魚鰭”快速左右扭動,把出口對準相應貨籃,這樣小球就會自動滑落至正確的地方。這款仍處於原型機階段的機器未來可在任何需要篩選的裝配線上發揮巨大作用。
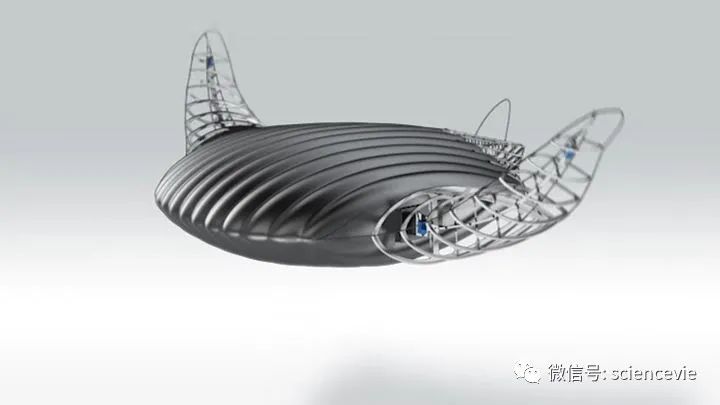
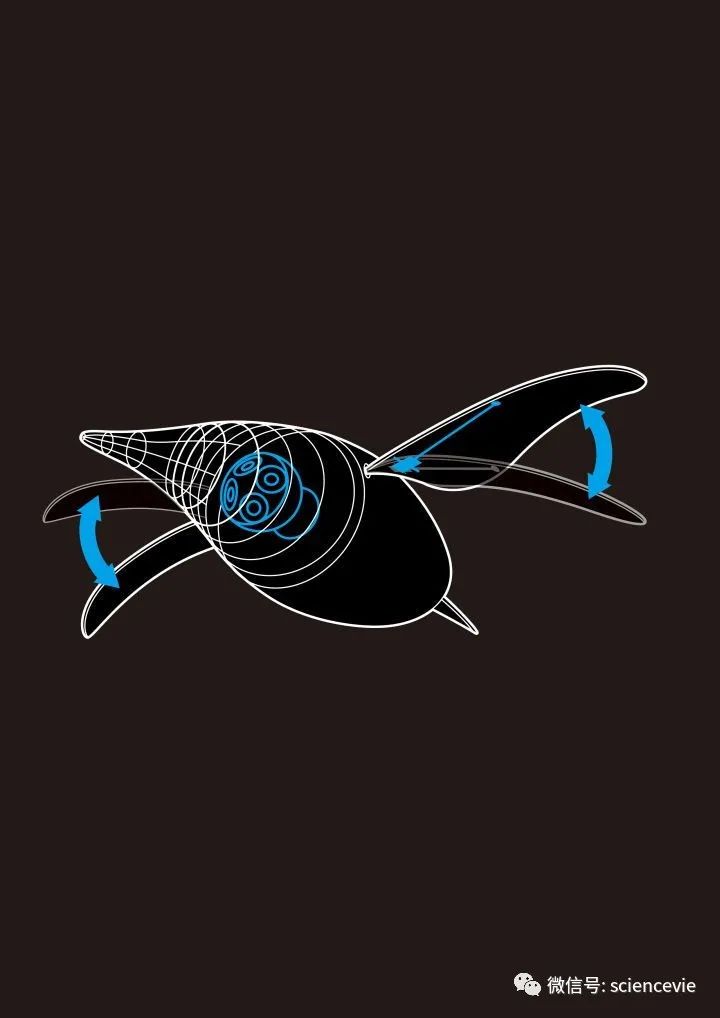
工作原理:
想象一張一折為二的紙。當你將對摺後的紙面互相搓動時,摺痕就會相應地上升或下降。
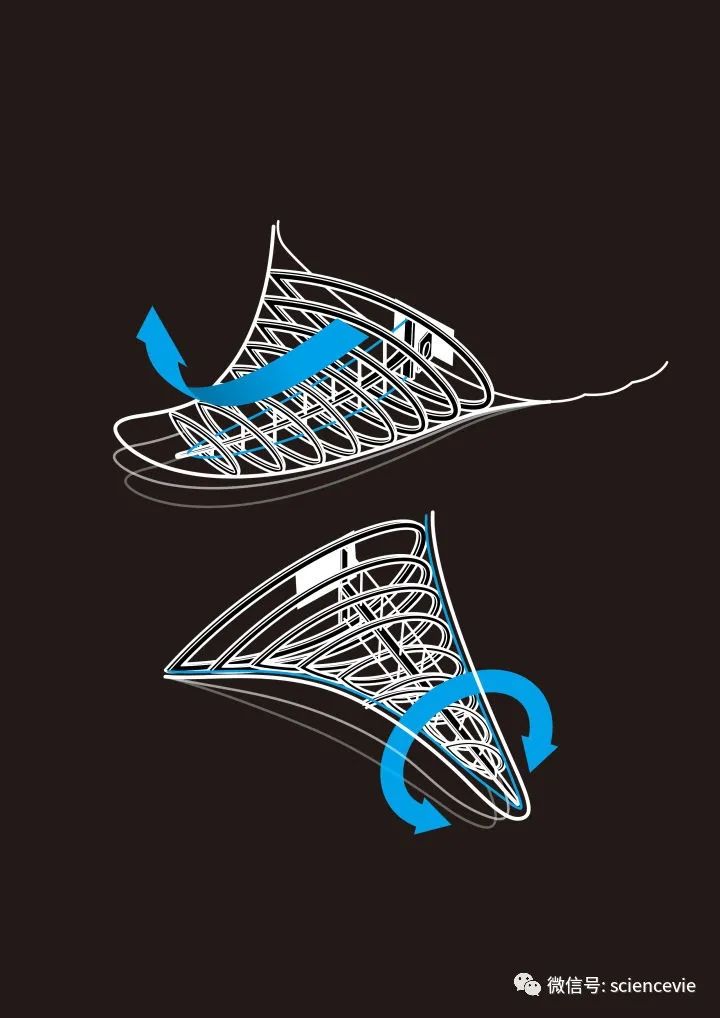
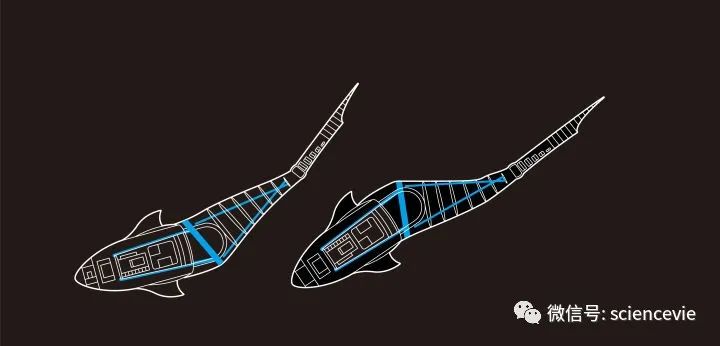
控制縱向擺動的纜線(藍色所示)
機器蝠鱝的雙鰭運動並不比這更復雜:魚鰭邊緣佈滿了由小型電動機輪流牽引的纜線,一部分從上到下控制魚鰭縱向的運動;一部分則從前到後繃在魚鰭上,使魚鰭可以前後扭轉。在它們的共同作用下,機器蝠鱝翩翩前進。
人形機器人

不要被這個“終結者”似的上半身所迷惑,這只是一個櫥窗,真正要注意的是那些氣動肌肉。

它們不僅威力強大,而且經久耐用,因此適用於各類工業機械。

至於那個人形手臂,儘管它其實不在費斯托公司設想的應用範圍之內,但也許能夠成為邁向高負荷外骨骼的第一步。
工作原理:
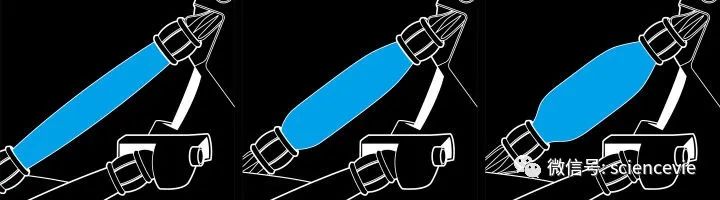
機器人手臂上的每塊“肌肉”其實就是一根覆有芳綸(一種超高強度材料,用於製造防彈背心和軍事頭盔)的橡膠管。以特殊方式纏繞的芳綸纖維,使得充入高壓空氣的“肌肉”只能徑向膨脹,因此當橡膠管鼓起來的時候,它的長度就會相應縮短,從而產生強大的牽引力。
費斯托公司稱,這種橡膠肌肉,其力量可達相同管徑氣動活塞的10倍!最纖細的“肌肉”(直徑1釐米)可舉起約70千克的物體,而最粗的“肌肉”(直徑4釐米)可舉起超過500千克的物體!真是個大力士!
撰文 Erwan Lecomte
編譯 王佳蕾