不只是安全絲:跳蛛空中平衡的生物力學 | 關貫之_風聞
风云之声-风云之声官方账号-2021-07-10 08:42
導讀
有拉絲的跳蛛,它們可以在空中保持一定的姿勢,在落地前穩住身體,平穩落地。
文/關貫之
漫畫/鄂禹臻
我的研究領域叫做比較生物力學,是專門研究非人類的生物運動背後的物理原理,時常要跟不同領域的專家一起合作。由於專業背景的差異,溝通過程會產生許多分歧,其中一部分是來自對嚴謹的定義。
有一個故事是這樣的:在一列英國的火車上,有三個科學家坐在一起,分別是生物學家、物理學家與數學家,他們正要參加一個科學聚會。此時火車經過一片草原,窗外有一隻黑色的羊正在吃草。生物學家首先開口,他興奮的説:「原來英國的羊是黑色的!」物理學家皺了皺眉頭説:「你們生物學家真是不嚴謹,你只可以説英國的羊,這一隻是黑色的。」然後數學家也皺了皺眉頭説:「你們物理學家真是不嚴謹,你只可以説英國的羊,這一隻,這一面是黑色的。」
這個笑話很生動的呈現了我研究過程中會遇到的場景,由於我自己是生物學背景,所以我通常就是鬧笑話的那一個。生物學在動物行為這一方面,有很大一部分的研究基於觀察。在描述行為的過程中,生物學家時常會加入主觀的臆測,有時候並不完全正確。一個有趣的例子,就是跳蛛在跳躍的時候,為什麼要在跳躍起點拉一條絲線?
跳蛛科是蜘蛛的一個科,這個分類羣裏的物種大多數不會結網,而是依靠跳躍捕捉獵物。可能是因為它們跳向蒼蠅的動作大有猛虎撲兔之勢,因此它們也被稱作蠅虎。生物學家發現,雖然跳蛛不太會結網,但是他它腹部仍然會產生蜘蛛絲。跳蛛會在起跳前用腹部末端點一下地面,附着一條絲,等它跳起之後,腹部會一直拉着這條絲,就跟電影中的蜘蛛俠在紐約大樓晃盪一樣。如果跳蛛沒有跳達預定目標,從空中掉下去,這條絲可讓它懸掛在空中,蜘蛛可以拉着絲回到原來位置,或是垂降到地面。因此,生物學家把這條絲稱作安全絲,就像是攀巖時用的安全繩。
Marvel蜘蛛人(驚奇蜘蛛人vol.4 #1封面)
然而具有較強物理背景的生物力學家,對這個説法產生了質疑。從人類的角度來説,從比自己身體高數十倍的位置摔落,當然是一件恐怖的事。但是跳蛛的身體又小又輕,空氣阻力對其影響甚大,下落的終端速度應該不快,即使從高空落下,也不見得會受傷。有沒有可能這條絲其實有別的功能呢?
首先針對這個問題進行研究的是一位高中生,陳永康。他就讀台中一中時便對跳蛛拉絲的行為很感興趣,因此他請了在中興大學物理系任教的紀凱容博士指導研究。紀凱容博士是我大學專題的指導教授,我們曾經一起合作發現目前已知最快的生物運動速度。可惜陳永康進實驗室的時候我還在唸初中,沒有機會認識。許多跳蛛研究的事情是後來聽紀老師説的。陳永康和紀凱容等人以一種校園內常見的跳蛛,安德遜蠅虎(Hasarius adansoni)作為實驗對象,在實驗室中飼養27只跳蛛。接着,他給跳蛛設計了一個室內跳台,並且用高速攝影機記錄安德遜蠅虎跳躍的過程。有趣的是,他發現其中5只跳蛛在跳躍的時候竟然不會從起跳點拉絲。這樣一來,剛好有了對照組,可以比較拉絲與否對於跳蛛跳躍運動的影響。經過比較兩者跳躍的影片,研究團隊發現了這條絲線一個重要的功能:平衡。
平衡!這可是生物力學領域的熱門項目。別看我們人類可以輕易地在走路、跑步或跳躍時保持平衡,對於機器人來説,平衡是非常難的,尤其是跳躍。一旦起跳時施力的反方向沒有通過質心,身體便會在空中旋轉,很難平穩落地。而陳永康等人在實驗室觀察到的跳蛛也發生類似的事情,沒有拉絲的蜘蛛會在空中失去平衡,最後摔落在目標物上。反觀有拉絲的跳蛛,它們可以在空中保持一定的姿勢,在落地前穩住身體,平穩落地。

圖/跳蛛跳躍時平衡絲的重要性(漫畫/鄂禹臻)
實驗結果顯示,無論跳蛛是否拉絲,都能跳出相似的高度跟距離,但是有拉絲的個體展現出較高的滯空時間、水平減速以及平衡性。兩者落地的情況差異最為明顯,有拉絲的個體是頭前腳後的水平姿勢落地,平均只要0.01 秒就可以站穩身體,而沒有拉絲的個體則是以頭上腳下的垂直姿勢摔落地面,平均需要花費0.05 秒的時間才能站穩身體。拉絲穩定身體的代價,便是消耗較多的機械能。沒有拉絲的跳蛛在空中主要受到空氣阻力的影響,落地前會損失33%的機械能。而拉絲的跳蛛因為透過對絲線的施力改變仰角,連同空氣阻力的效應,跳躍過程會損失76%的機械能。從生物學的角度來理解這個結果,會發現跳蛛能否平穩降落,很大程度的影響捕食能力,頭上腳下的摔落顯然難以抓捕獵物。而如果跳蛛正在躲避天敵,要以5倍的時間才能站穩,也可能就此被天敵抓獲。
這個發現為動物跳躍的平衡方式提出第三種機制。過去生物力學家把跳躍平衡歸類為兩種,分別是四肢的擺動與尾巴的擺動,這兩種方式都是靠角動量守恆原理,透過肢體運動在空中產生角動量,進而使得體軸產生相反的角動量以保持平衡。而跳蛛所使用的平衡則不屬於這兩種,而是透過蜘蛛絲拉扯地面,產生額外的旋轉,如此一來,蜘蛛不需要大幅擺動肢體,也不用演化出厚重的尾巴。
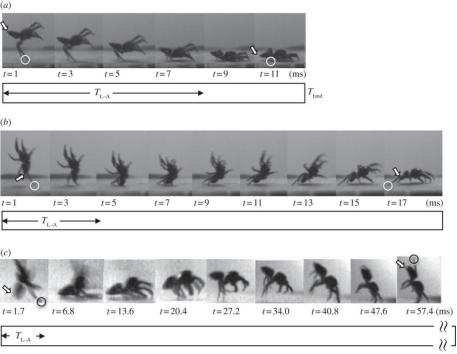
圖/安德遜蠅虎的落地過程(a)有拉平衡絲的個體 (b,c) 沒有拉平衡絲的個體 (Chen et al. 2013)
這個研究結果於2013年發表在《英國皇家學會學報·界面》(Journal of the Royal Society Interface),題目為《不只是安全絲:跳蛛科的跳躍平衡絲》(More than a safety line: jump-stabilizing silk of salticids), 論文鏈接: https://doi.org/10.1098 /rsif.2013.0572。
這個研究同時受到蜘蛛學家與仿生學家的關注,目前被引用了19次(Google 學術的統計)。這個結果打破了生物學家既有的認知,表明跳蛛起跳前所拉的絲線不僅僅是為了安全,更重要的功能是幫助跳蛛在空中平衡身體,並且很大程度的影響其捕食率以及逃跑的機會。而從引用此研究的論文名單中可以發現,這個生物力學研究至少啓發了兩個研究團隊的跳躍機器人設計。以下為其中一個團隊公佈的影片,它們的跳躍機器人遇到了空中無法平衡的問題。在給機器人做了一條平衡絲之後,就能安穩的落地。
影片:受跳蛛平衡絲啓發的跳躍機器人(Shield et al. 2015)
這段影片最後一段,是拉了平衡絲的跳躍機器人,畫面在平穩落地的瞬間戛然而止。我想有可能是接下來機器人發生彈動並翻覆,所以停在這裏,很可能還需要有落地時的緩衝機制,不過至少已經能解決空中翻轉的問題。
讓我驚訝的是,另外一個引用這篇論文的研究竟然是在國際太空站進行的。這個研究起源於太空站實驗計劃徵選,有人提出要測試跳蛛是否能在微重力的情況下捕食,並且被主辦方採納。因此兩隻跳蛛被帶到了國際空間站,其中一個個體成功跳起並抓獲了漂浮在空中的果蠅。有趣的是,它起跳前也有拉絲,並在捕獲果蠅後利用這條絲回到了容器表面。雖然這個行為沒辦法看出絲線是否仍然扮演了平衡的角色,不過倒是讓安全絲名符其實了一回。現在我們也有自己的空間站了,不知道什麼時候也能帶跳蛛上去蹦一回呢?

圖/被帶上國際空間站做捕食實驗的跳蛛(David 2016)
引用文獻:
Chen, Yung-Kang, et al. “More than a safety line: jump-stabilizing silk of salticids.” Journal of The Royal Society Interface 10.87 (2013): 20130572.
Shield, Stacey, Callen Fisher, and Amir Patel. “A spider-inspired dragline enables aerial pitch righting in a mobile robot.” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015.
Hill, David E. “Jumping spiders in outer space (Araneae: Salticidae).” Peckhamia 146 (2016): 1-7.