LiDar 還在磨磨蹭蹭,800 萬像素攝像頭都上車了_風聞
42号车库-42号车库官方账号-最懂智能电动汽车的汽车新媒体。2021-07-14 22:09

2021 年被譽為激光雷達元年的原因不僅僅是因為今年上半年蔚來 ET7、極狐阿爾法 S HI 版、小鵬 P5、長城摩卡和智己 L7 等車型的發佈,給出了激光雷達落地的預期,同時也因為我們也在資本市場上,見證了激光雷達的魔法。
可是,相比於 PPT 味道還沒散去的激光雷達,隔壁的 800 萬像素攝像頭已經率先實現了量產。
01車載 800 像素攝像頭元年****第一個吃螃蟹的,是 2021 款理想 ONE。

2021 款理想 ONE 變貴了一萬,讓許多老車主心裏複雜。產品力的提升似乎告訴大家,早買早享受這個概念對於還處於快速發展階段的智能電動車行業,似乎並不完全成立。但是這些也都不重要,因為新款理想 ONE 獲得了全世界第一個量產車載 800 萬像素攝像頭。
800 萬有多清楚?
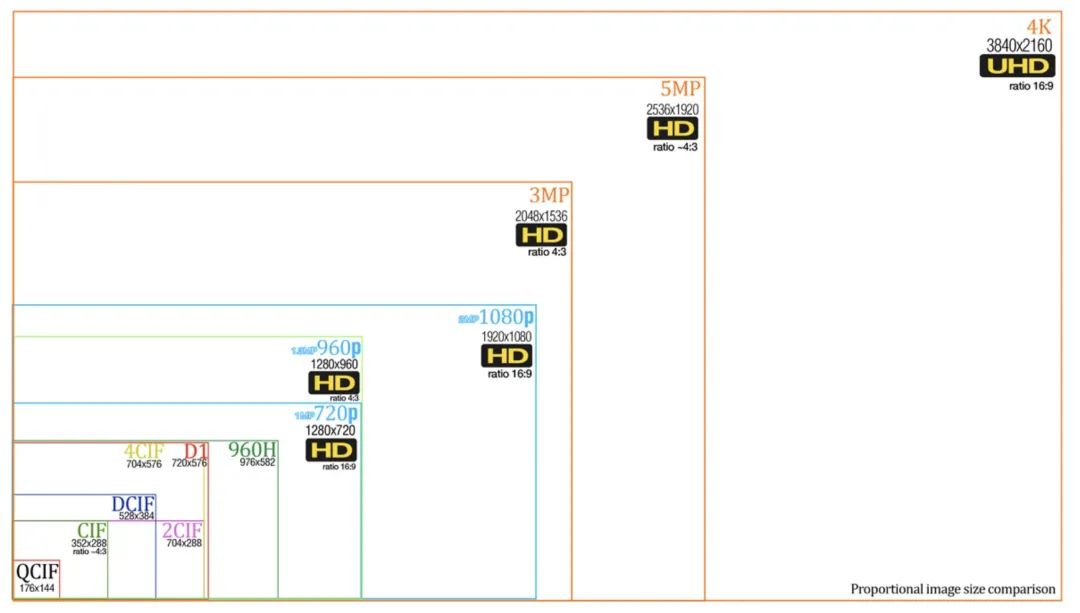
比如現在最主流的 4K 電視,4K 指的就是電視畫面在橫向上大約有 4 千個顯示不同顏色的小方塊,也就是像素(實際上是 3,840 個)。而這個電視在縱向上有 2,160 個像素。
把縱橫的像素數量相乘,得到的就是 830 萬像素。這就是 800 萬這個數字背後的根據。
目前絕大多數配備輔助駕駛的車型使用的主攝像頭的都在 130 萬像素上下,相當於 960p 的分辨率。而小鵬 P7 的攝像頭為 200 萬像素,有 1080p 的分辨率,但也只是第一代全高清電視的清晰度,和 4K 或者是 800 萬像素相比,只有 1/4 的清晰度。
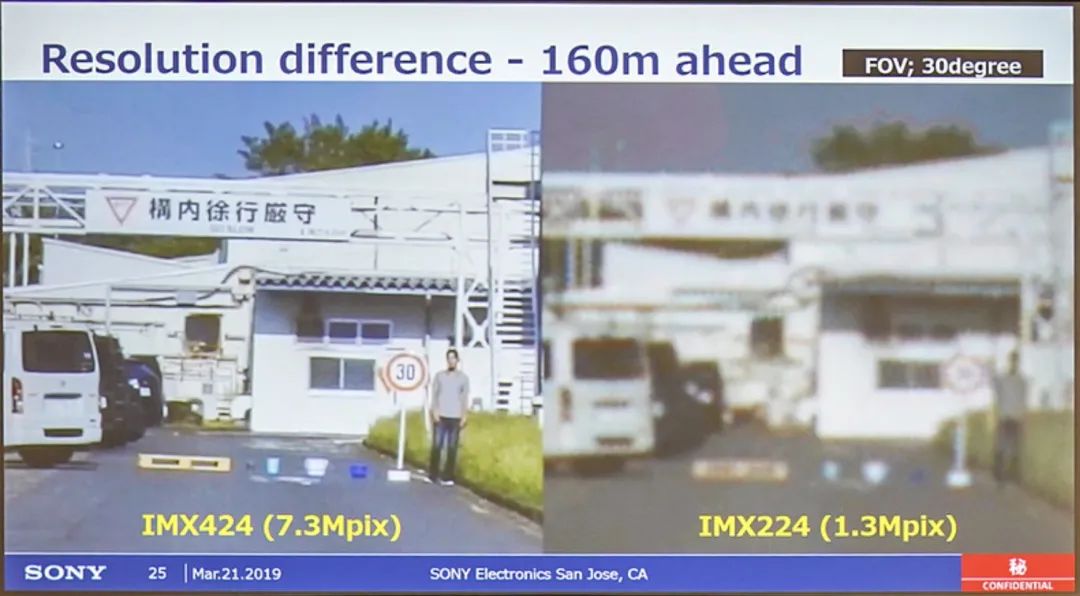
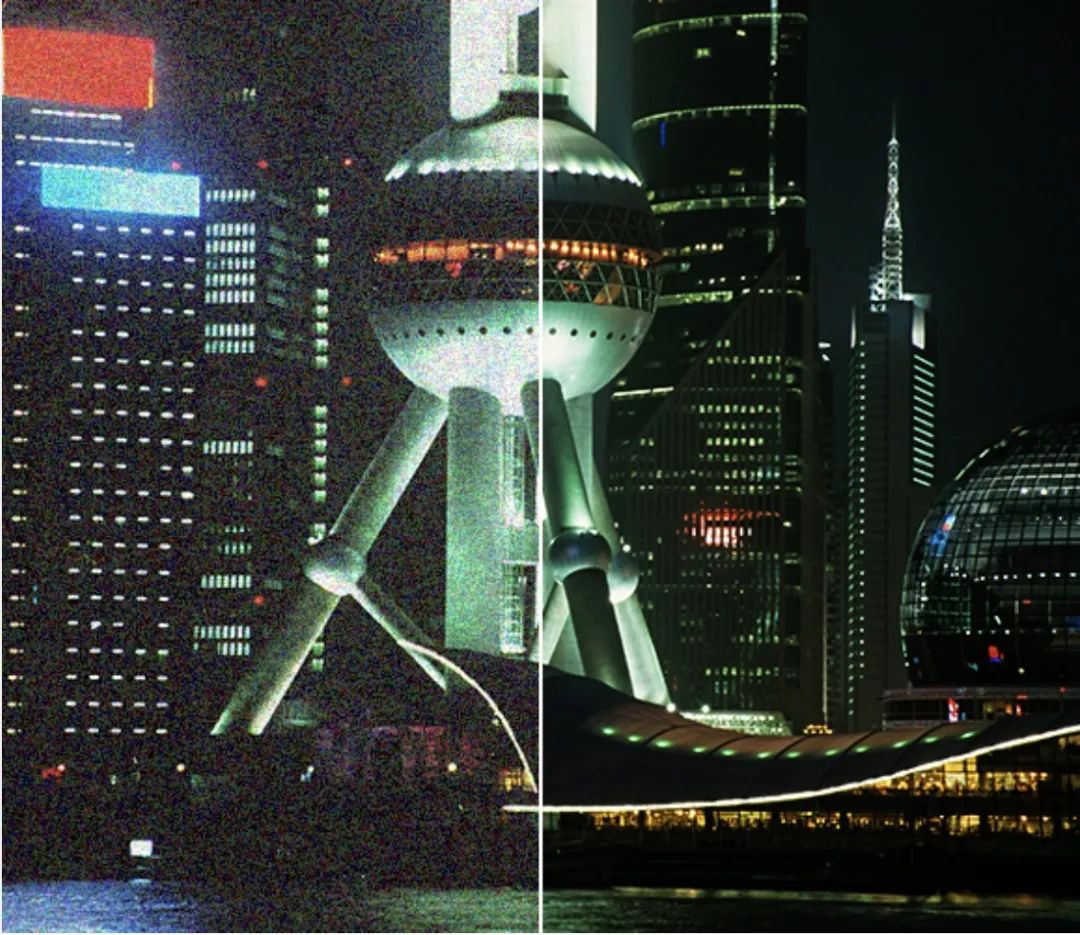
上圖很直觀地對比了視角(FOV)同樣為 30°,但像素分別為 730 萬 和 130 萬的攝像頭在 160 米外的成像效果。後者在這個範圍已經一片模糊,但前者依然可以分辨出橫幅中的文字、限速的數值以及地面上的物體。也就是説,同等條件下更高像素的攝像頭可以讓你看得更遠,而且看見更小的東西。
02實際體驗****800 萬像素給理想帶來了什麼?

新款理想的攝像頭的 FOV 為 120°,相當於是一個大廣角。對比老款的 130 萬像素以及 52° 的 FOV,像素增加了約 5 倍,而視角也是原來兩倍以上的寬度。

由於增加的像素比視角的幅度要大,新款理想 ONE 可以説是全視角範圍內都提升了識別能力。在實際體驗中,2021 款理想 ONE 的過彎能力顯著增加,併成功通過了在我們 42Mark 項目中被譽為 A 級魔鬼彎的高架匝道路段,一雪前恥。
到這裏,可能有人會説新款 ONE 上的這顆 800 萬像素攝像頭的有效視距為 200 米,相比之下,只有 120 萬像素的 Model 3 給出的有效視距為 250 米。這不打臉嗎?
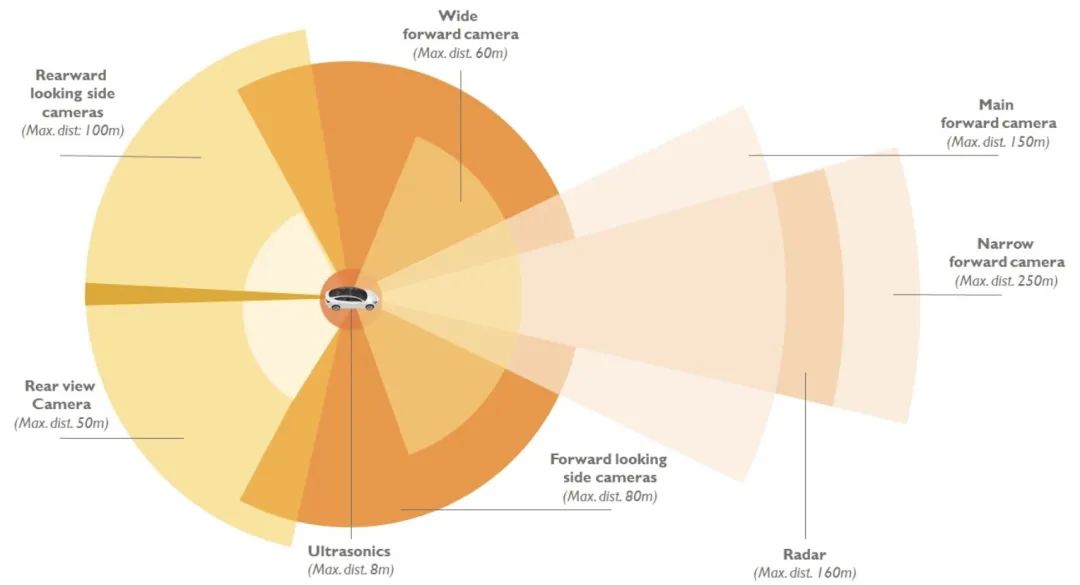
特斯拉感知能力示意圖(圖源:Yole)
事情其實沒有這麼簡單,但也沒有那麼複雜。特斯拉之所以可以靠 120 萬像素的攝像頭看到更遠,是因為它用了三個這樣的攝像頭,分別擁有不同焦段。看得最遠的是一個窄視角的長焦端攝像頭。相比於特斯拉的三個扇形,理想的視野範圍就是單個更大的扇形,在遠距離也能提供更廣的視角。

除了攝像頭性能提升,改款理想 ONE 新添了四個角雷達,是不是因為角雷達導致的彎道性能上升?其實事情也並不是這樣的。角雷達主要的作用是在換道時用來偵測變道軌跡上的車輛,卻無法檢測車道線或道路的走向。畢竟不是所有的地方都是單車道且帶有牆壁的高架匝道,過彎能力主要還是看攝像頭能提供多少路面的語意信息。
上來就是 11 個的蔚來
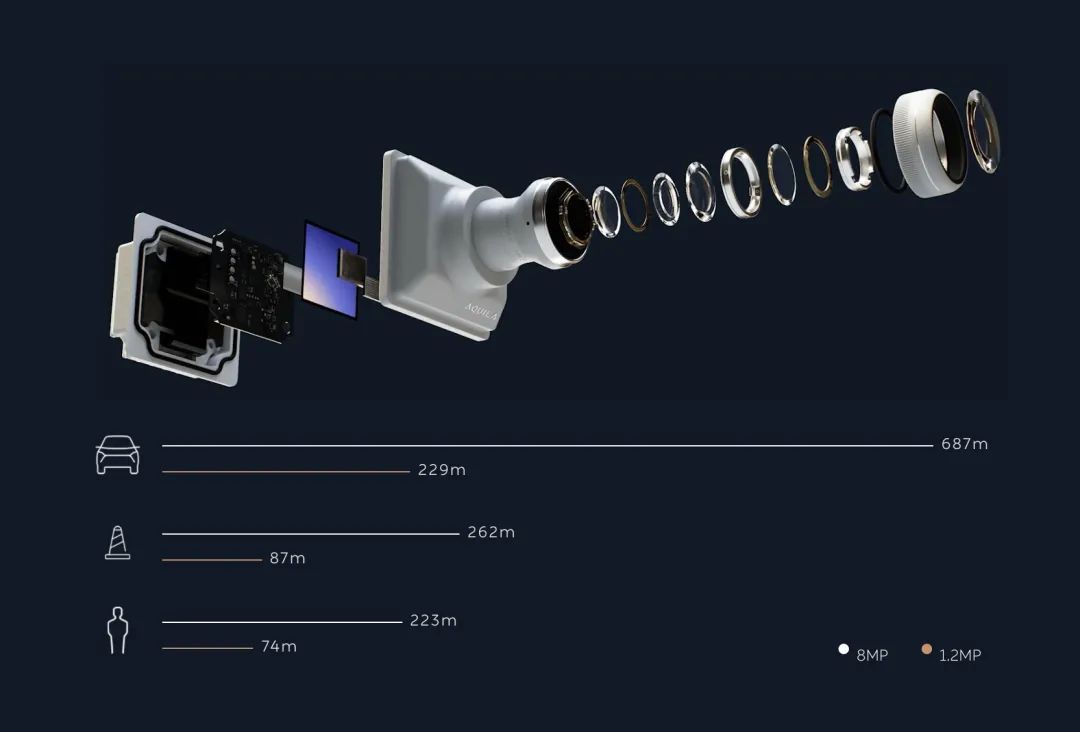
如果説理想 ONE 靠 1 個前視 800 萬攝像頭來追平甚至超越主流的低像素 3 前視攝像感知方案是一種性價比高的行為,那麼蔚來在將在明年 Q1 交付的旗下第一款轎車 ET7 上搭載 11 個 800 萬像素攝像頭的土豪做法,就是想把感知能力徹底提升。從蔚來公開的對比圖可以看出,採用 800 萬像素攝像頭後,車輛、行人、樁桶的的識別距離都提升了 3 倍。
高像素攝像頭在用户體驗上,可以説是隻有優點。看得更遠就代表能更早地看到車輛目標和 VRU(Vulnerable Road User,弱勢道路使用者)目標,可以提前做很多規避的行為,帶來更順暢的輔助駕駛體驗。
而在不久的將來逐步開放的城市 NoA 場景中,在更寬的視野下看得更清晰就代表着能更好地對路面上的小型障礙物以及橫穿的 VRU 有更準確的識別,這些近距離的 VRU 鬼探頭場景,正是是毫米波雷達束手無策的 corner cases。
03高像素背後的技術
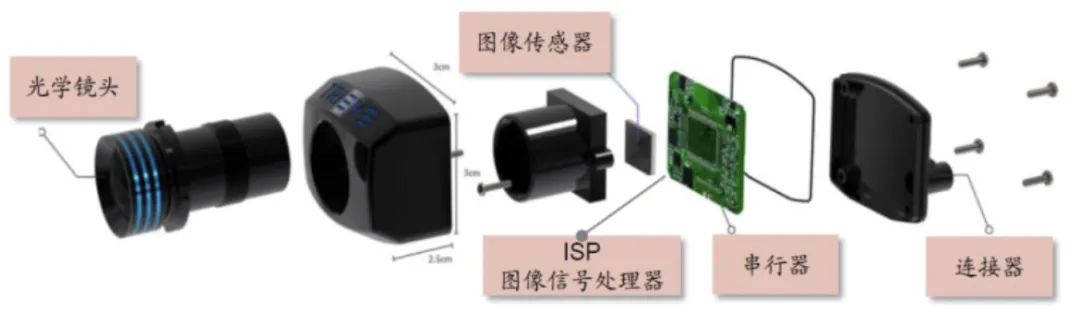
車載攝像頭模組由鏡頭(lens)、圖像傳感器(CIS)、圖像信號處理器(ISP)等主要組件構成。鏡頭把光線聚焦到 CIS 上,後者產生圖像信號並輸入 ISP 中做進一步的圖像處理。
一個攝像頭的分辨率多少,由 CIS 上的像素數決定。但整體成像表現還要綜合考慮鏡頭的性能以及 CIS 本身的能力以及 ISP 的功能。
論拍照和視頻畫質,其實手機攝像頭可以秒爆任何一款車載攝像頭。但是車規並不是消費電子上的零件能滿足的。
車規的挑戰
相比手機攝像頭,車載攝像頭需要在高低温、濕熱、強微光和振動等複雜工況下保持工作穩定。鏡頭材質也必然是玻璃,而不是塑料。
受限於搭載空間和成本,CIS 的尺寸不可能無盡增加。高像素化理論上意味着單個像素尺寸減少,低照度場景性能降低,但顯然這些都不允許發生。
產品解析
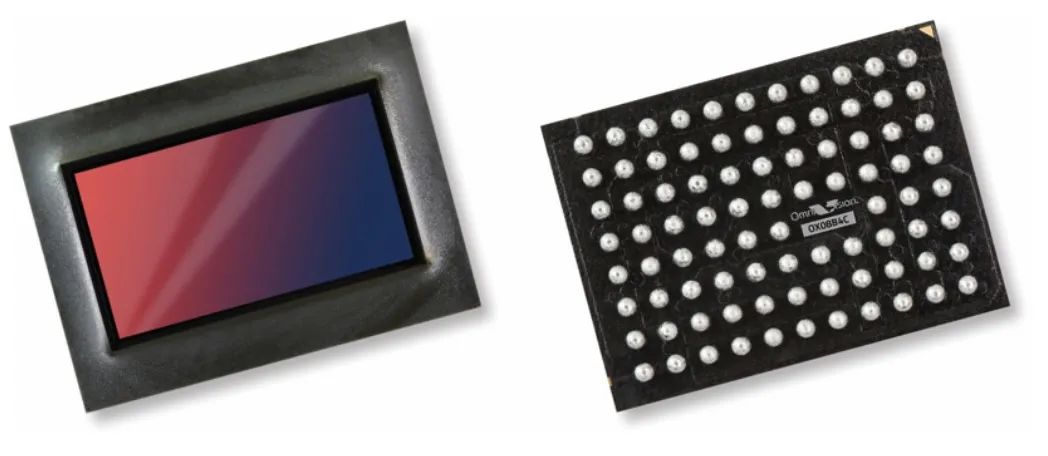
豪威 OX08B4C
我們就拿行業頭部企業豪威的車規旗艦產品來介紹一下車規 CIS 需要具備什麼樣的能力。
PureCel®技術可以減少像素串擾和噪聲,在弱光下實現更優的色彩還原。
同品牌的 130 萬像素車載 CIS 有足足 4.2 微米的像素間距,卻只有 120 dB 的動態範圍。但這款 830 萬像素的車載 CIS,雖然每個像素只有 2.1 微米,但實現了 140 dB 的高動態範圍(HDR)和 LED 頻閃消除功能(LFM)以及更低的夜間噪點。

高動態範圍(HDR)有什麼用?設想一下在你從黑暗的隧道出來,如果你的攝像頭不能在這些場景下清晰辨認車道線等重要目標,那麼將會對車輛的輔助駕駛規控和行車安全產生極大的負面影響。
LED 的閃爍對於手機用户來説,只是你拍出來的作品的專業度問題。但對於汽車來説,可能會造成道路信息的讀取錯誤。所以,LFM (LED 頻閃消除)是一個在手機攝像頭上不太常見,但卻是車載攝像頭必備的功能。
對於上述能力,CIS 廠商需要掌握的是空間域曝光和雙轉換增益能力。而車載攝像頭 CIS 廠家中,豪威和索尼在這方面的技術儲備佔優。
04高像素車載攝像頭是必然的

豪威的醫療產品也進入了 800 萬像素時代
電視、顯示器、手機、攝像設備都開始紛紛進入 4K 時代,顯然對應 4K 以及更高畫質的攝像頭正在成為主流。消費電子對高像素的追求,顯然也會在產能的偏重中體現出來。
雖然因為更嚴格的車規要求和更復雜的功能要求,車載攝像頭的研發進度必然會晚於消費級攝像頭。但消費市場的需求在推進車載市場的技術升級是顯而易見的。
芯片的算力提升和車內網絡的帶寬也是高像素化的推進力之一。為了應對 ET7 的感知系統每秒生成 8 GB 的數據量,蔚來也給它配備了 4 塊 Orin 芯片,算力高達 1,012 TOPS。連接一下這前後邏輯,我們可以發現在某種程度上,摩爾定律也是推進像素增加的原動力之一。
李想所想

理想在發佈改款理想 ONE 時説,
激光雷達變得越來越便宜,攝像頭越來越貴,一個 800 萬像素的攝像頭要貴四五倍,800 萬的像素用完了以後就會往 2,000 萬的像素上去看的,那個價格會更貴了。看四五年以後,可能 2,000 萬像素的攝像頭會跟激光雷達一個價格。
到時候,2,000 萬像素的攝像頭和激光雷達會不會是相同的價格不好説,但是攝像頭在量產激光雷達沒出現之前,甚至在後者出現後都會是智能駕駛系統中關鍵的組件。在視覺上只能提供形狀信息的激光雷達,不可能完全取代攝像頭所提供的視覺信息,而視覺信息也是目前在自動駕駛算法中最重要的信息來源。
特斯拉的主張
馬斯克對於激光雷達的態度就是「誰用誰傻X,誰用誰完蛋」,而特斯拉的自動駕駛負責人 Andrej Karpathy 表達得更加有理有據。

Karpathy 稱,特斯拉的最大優勢就是:
量產車中頂尖的垂直整合能力。特斯拉可以從銷售的以百萬輛為單位汽車中收集駕駛數據;
剛發佈的 Dojo 超級計算機羣則可以對海量的數據進行自動化的標註並訓練其神經網絡以進行快速迭代。
Karpathy 表示如果該系統繼續改進,特斯拉可能會讓激光雷達徹底過時。
分辨率的盡頭

根據影像專家 Roger Clark 的理論,人眼的分辨率可達 5.7 億多。相比之下,目前已知的視覺感知能力最強車型蔚來 ET7,車外視覺感知能力的總像素也就 8,800 萬,遠沒有達到人眼。

10K 電視會比這款 5 萬塊的小米還要清楚 2 倍
如果以人眼為終極目標,單個車載攝像頭的分辨率將會達到 5,000 萬像素級別,如果按照電視的高清規則,則相當於 10K。
05智能出行生態才剛剛開始
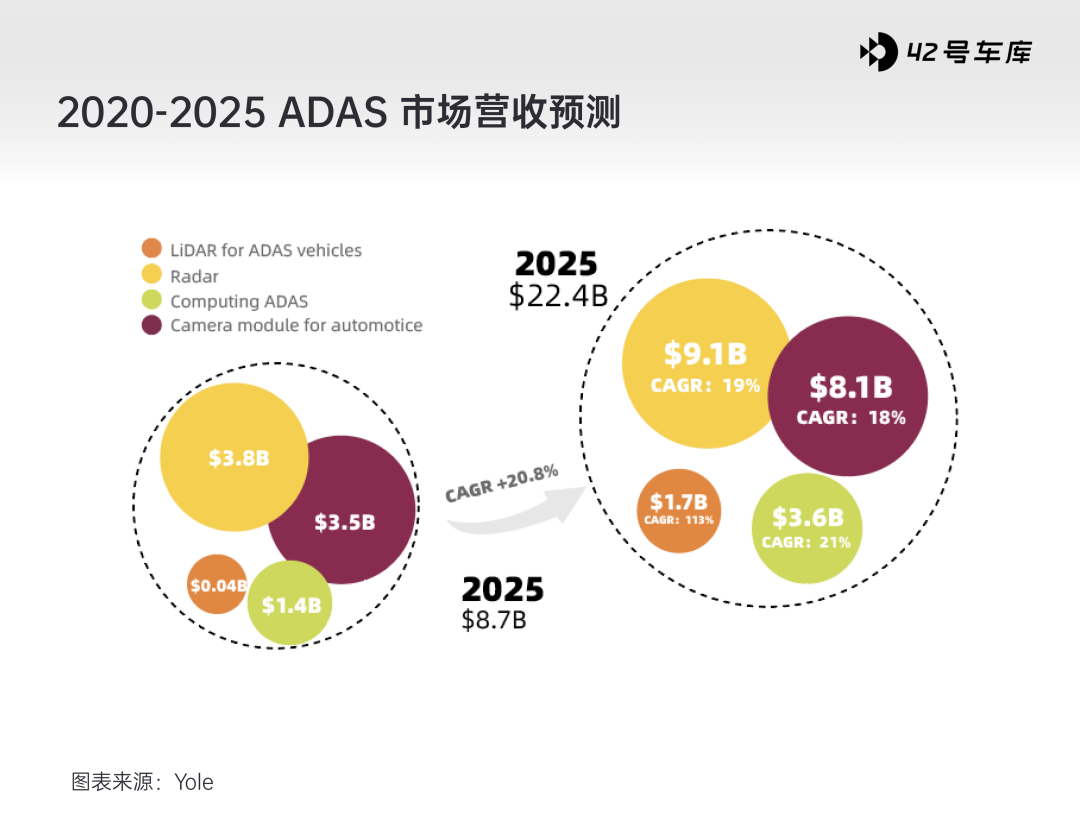
自動駕駛概念相比智能手機爆發晚了整整十年,手機市場已慢慢進入存量競爭,但自動駕駛市場才剛開始。還根據 Yole 的報告,汽車攝像頭模組市場規模將在 2025 年達到 81 億美元。
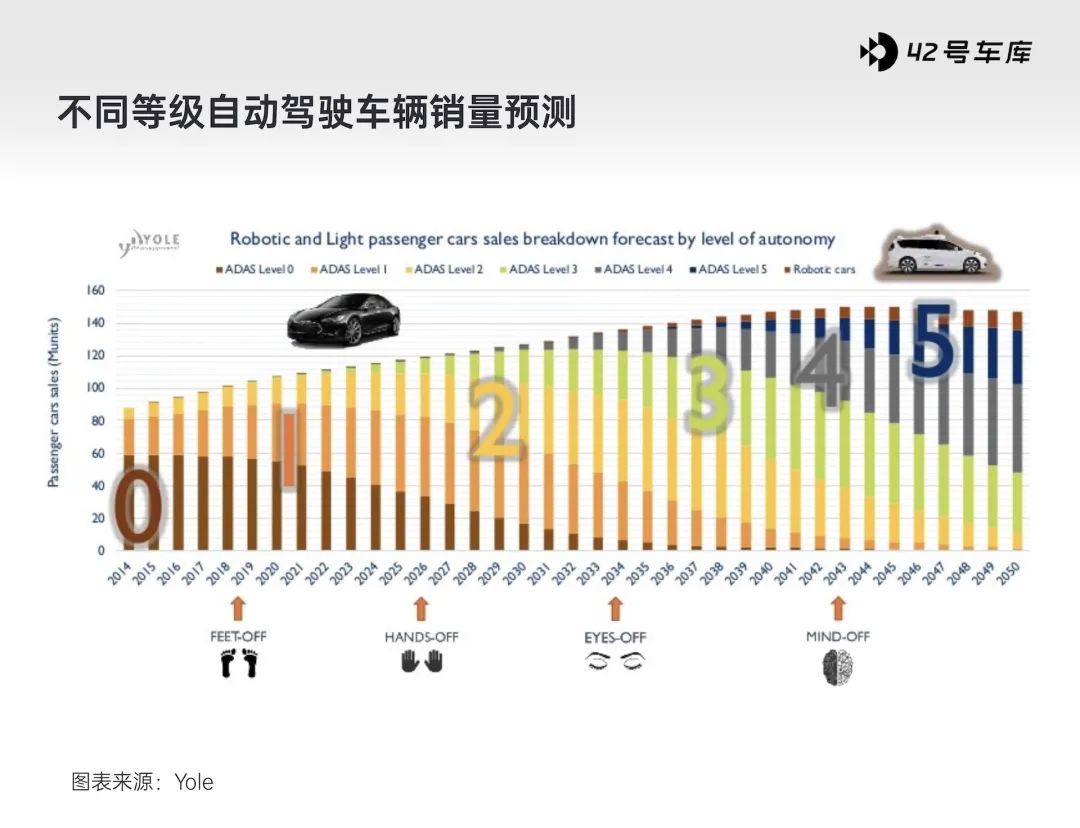
只有到了路上所有車都能達到 L5 的時候,自動駕駛才是一個不需要被衡量性能的標準配置。顯然,感知能力的軍備競賽是一個漫長且持續的過程。
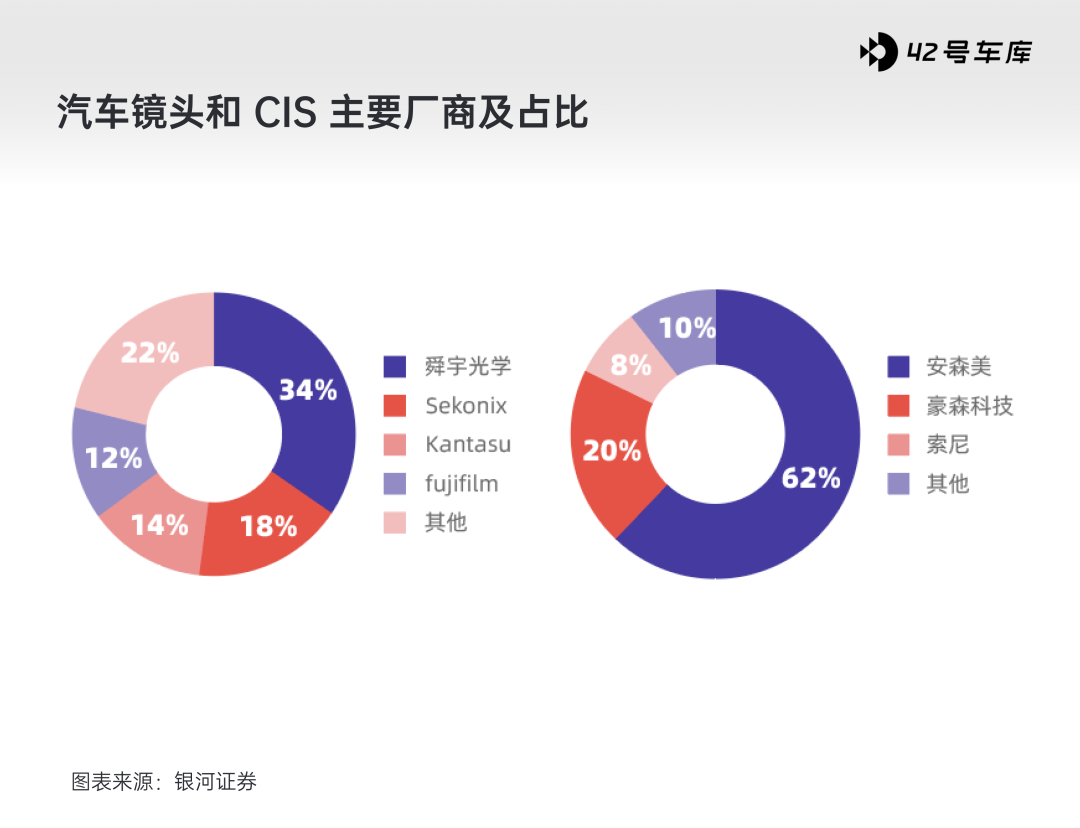
顯然,車載攝像頭產業鏈是一個投資者們值得關注的持續火熱的賽道。考慮到安全因素,汽車廠商傾向於選擇技術成熟、品質有保障的零部件廠商,因此車載零部件廠商進入市場體系獲得評級需要更長的認證週期,行業壁壘較高,頭部效應將會明顯。(上圖為 2019 年數據)

不知道大家有沒有注意到,最近上線的特斯拉 FSD beta V9,在夜間行駛時是有打開遠光的需求的。同樣,在我們的 42Mark 測試中也發現,開啓 AP 的特斯拉在夜間過高架彎道時,也會時不時地閃爍遠光,以達到補光作用。
增加像素而提升分辨率是在空間維度上讓車子看得更清楚,而夜間能力的提升,等於是讓車子在時間維度上看得更清楚。所以,針對全時域的圖像處理能力的比拼,才是高像素化的大前提下改變目前的市場佔比格局的因素。