衞星怎麼給地球“拍照片”?_風聞
返朴-返朴官方账号-关注返朴(ID:fanpu2019),阅读更多!2021-09-12 15:07
 撰文 | 麥李婷
撰文 | 麥李婷
説到拍照,我們自然地聯想到攝像頭和快門,將攝像頭對準需要觀測的東西,快門一按,就能得到一張在二維像素點上填上三原色座標的數據構成的圖像。
 但是對於衞星觀測地球(地表/地球大氣)來説,具體的成像原理就會稍微複雜一些。
但是對於衞星觀測地球(地表/地球大氣)來説,具體的成像原理就會稍微複雜一些。
掃描方式
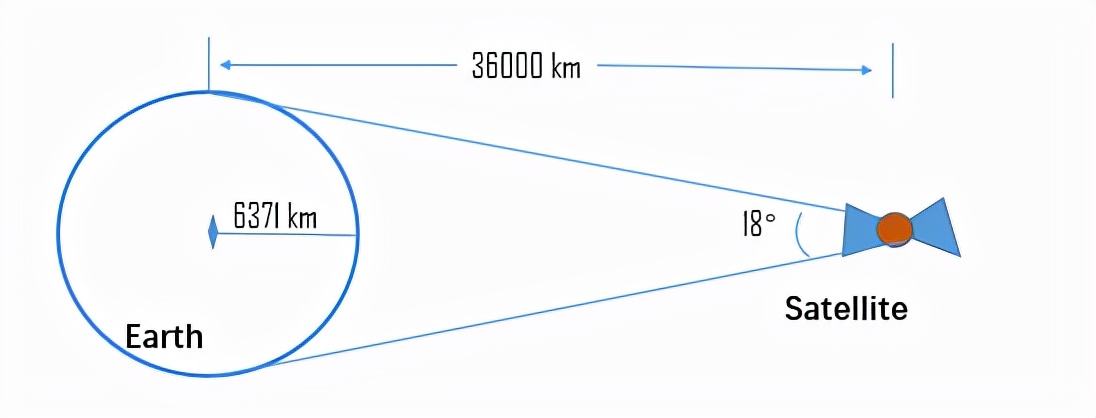
衞星按照軌道可以分為靜止衞星和極軌衞星。我們知道,地球的自轉角速度是固定的,若要用一個衞星恆定地監測地球,那麼衞星軌道的高度就是固定的,這就是靜止衞星。靜止衞星高度有36000km,地球半徑約6371km,可以想見,在衞星上看地球的張角只有20.38°,直接拍照的效果怎麼會好呢?我們想要有很高分辨率的圖像須要用“掃描”的辦法。
 具體來説,“掃描”是通過調整觀測儀器的角度,對準地球的不同位置,獲得數據。比如風雲2號氣象衞星,衞星本身繞着自己的主軸旋轉,使得傳感器能在地球上掃描出帶狀的觀測數據;再使衞星調整姿態,向上向下傾斜,就能再地球上掃描出“平行”的觀測數據。
具體來説,“掃描”是通過調整觀測儀器的角度,對準地球的不同位置,獲得數據。比如風雲2號氣象衞星,衞星本身繞着自己的主軸旋轉,使得傳感器能在地球上掃描出帶狀的觀測數據;再使衞星調整姿態,向上向下傾斜,就能再地球上掃描出“平行”的觀測數據。
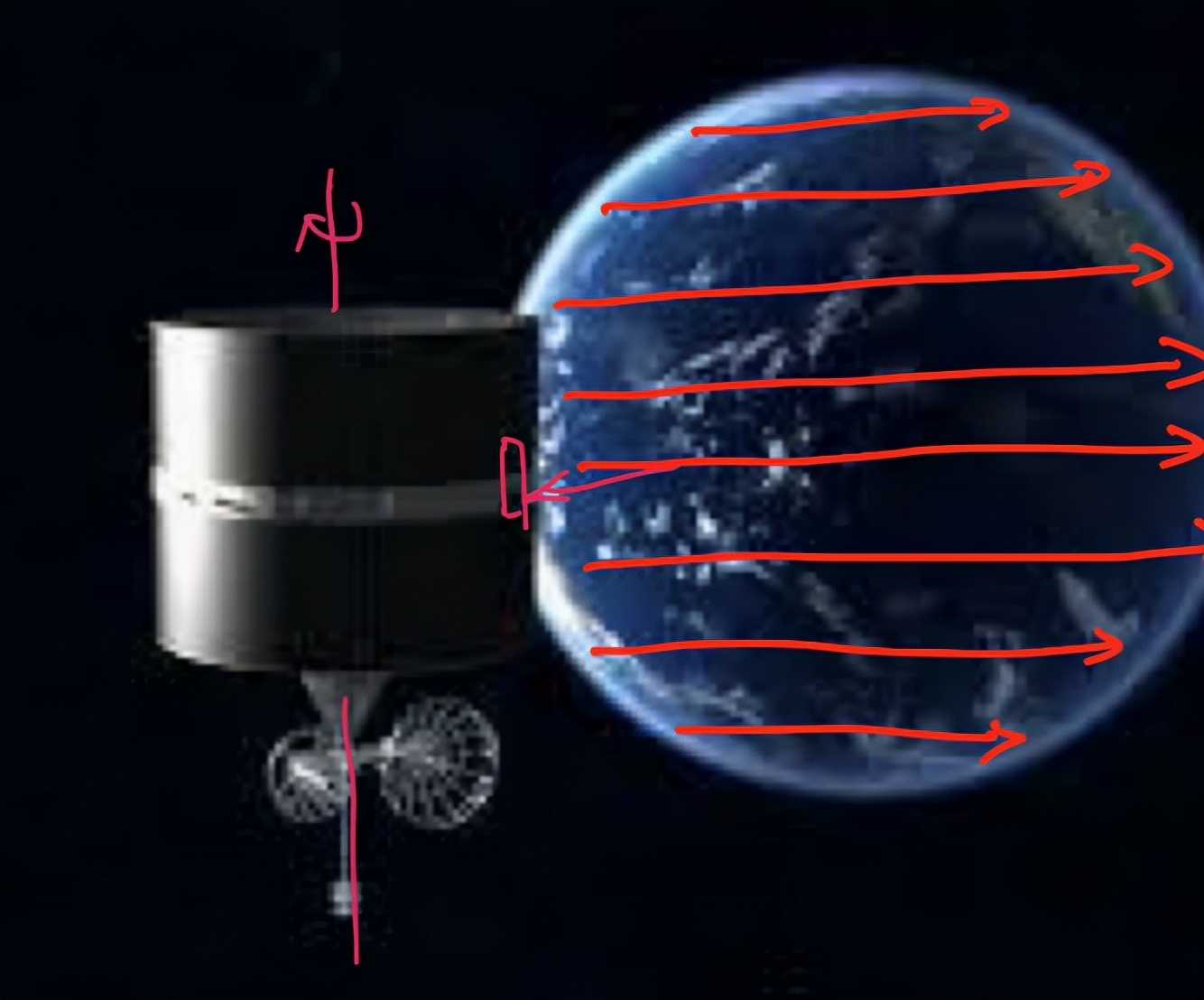 圖源:央視新聞客户端+筆者標明掃描路徑和衞星旋轉方向
圖源:央視新聞客户端+筆者標明掃描路徑和衞星旋轉方向
當然,不同衞星可以通過採用不同的調整姿態的方式來提高觀測利用率。就風雲2號氣象衞星來説,在衞星自身旋轉一圈360°中只有幾十度是對着地球的,它的利用率顯然不高;而到風雲4號衞星,採用了三軸穩定的方式,主動控制衞星朝向,使探測器在旋轉過程中一直面對地球,這樣觀測效率顯然提高很多。
 圖源:谷歌圖片“風雲四號氣象衞星”
圖源:谷歌圖片“風雲四號氣象衞星”
那麼有人不禁要問了,為什麼不早採用三軸穩定方式控制衞星朝向呢?
 因為三軸穩定方式沒那麼簡單。
因為三軸穩定方式沒那麼簡單。
自旋穩定方式在衞星做繞地運動時很容易能做到自身姿態穩定,重點在於衞星本身對自己的主軸軸對稱;而三軸穩定方式若想要使探測器一直朝着地球,衞星的姿態如何穩定是個很大的問題。
其次,自旋穩定衞星受到太陽輻射是均勻的,而三軸穩定衞星由於一個面一直朝着地球,衞星兩面受到太陽輻射量差距會使得衞星發生形變,材料的研製和使用、衞星儀器的排布都是需要細緻考量的。
 而靜止衞星離地球較遠,觀測精度難免會受到限制,我們希望獲得更高精度的觀測數據就需要極軌衞星。極軌衞星(也叫太陽同步衞星)的軌道較靜止衞星來説更低,約為840km,繞地球的南北兩極運行。
而靜止衞星離地球較遠,觀測精度難免會受到限制,我們希望獲得更高精度的觀測數據就需要極軌衞星。極軌衞星(也叫太陽同步衞星)的軌道較靜止衞星來説更低,約為840km,繞地球的南北兩極運行。
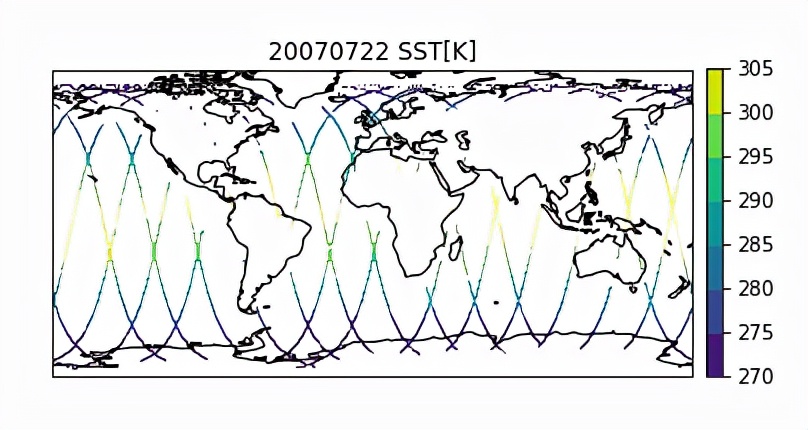
它的觀測方式可以想象成做CT的時候掃描,儀器/衞星掃過哪兒,就能獲得哪個地方的數據;因而衞星的軌道和觀測數據的經緯度是可以直接匹配的,所以常能聽到“一軌數據”的説法。舉個例子,CloudSat衞星在20070722一天內在地球上掃出來是這樣的:
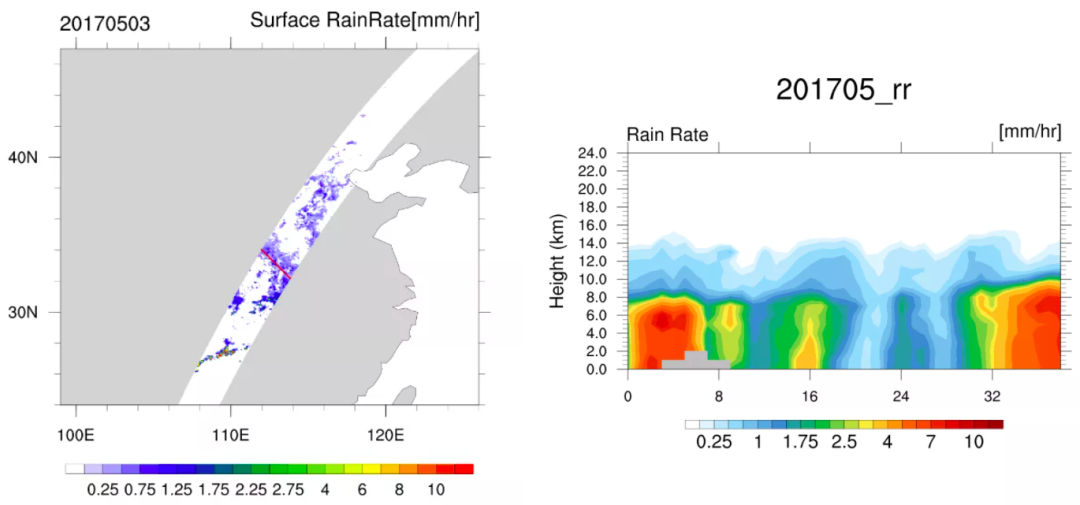
 可以看到它的覆蓋範圍還是比較小的。當然也有衞星在行進的過程中,會將探測儀器加上垂直於軌道方向的擺動,以此探測到一個面的數據。比如左圖是GPM衞星的測量的地表降水,在紅線處畫剖面就能得到紅線處的降水率剖面(右圖):
可以看到它的覆蓋範圍還是比較小的。當然也有衞星在行進的過程中,會將探測儀器加上垂直於軌道方向的擺動,以此探測到一個面的數據。比如左圖是GPM衞星的測量的地表降水,在紅線處畫剖面就能得到紅線處的降水率剖面(右圖):
 存在問題
存在問題
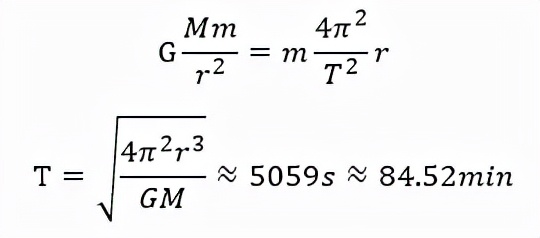
很明顯,觀測到的每一軌數據中存在時間差,按照衞星貼地飛行、粗略估算衞星繞地球一圈的週期約為84分鐘。我們挑出一軌的數據分析,其實很難説這84分鐘的數據是同時觀測的;挑其中某段數據分析也應當考慮到其時間上的差異。
 如果我們需要分析全球/地區數據,就需要考慮用很多天的數據集合成一張圖來表示長時間的平均狀態。而我們得到的“平均狀態”中任何一個點,實際上都不是對該點進行長時間連續觀測後取平均得到的狀態,而是時隔很久後再次觀測到這個點;且正是因為我們觀測不到“同時數據”,地圖上不同點的平均實際是不同時刻的平均。有點繞啊,反正説這麼多就想表達:除了空間分辨率之外,時間精度的提升也是個非常重要的事情。
如果我們需要分析全球/地區數據,就需要考慮用很多天的數據集合成一張圖來表示長時間的平均狀態。而我們得到的“平均狀態”中任何一個點,實際上都不是對該點進行長時間連續觀測後取平均得到的狀態,而是時隔很久後再次觀測到這個點;且正是因為我們觀測不到“同時數據”,地圖上不同點的平均實際是不同時刻的平均。有點繞啊,反正説這麼多就想表達:除了空間分辨率之外,時間精度的提升也是個非常重要的事情。
本文經授權轉載自微信公眾號“石頭科普工作室”。