陳根:新型機器人,兼具行走和飛行_風聞
陈根-知名科技作家为你解读科技与生活的方方面面。2021-10-18 09:48
文|陳根
雙足機器人曾是科幻文學和電影的主題。在非理想地形上,早期雙足機器人的形象通常是移動緩慢且笨拙的。近年來的技術進步使得它們能夠在保持平衡的同時更快、更有效地移動,但是其移動或多或少還是會受到崎嶇地形的阻礙。
相比之下,飛行機器人只需要在地面上空飛行即可輕鬆駕馭崎嶇地形,**但它們同樣面臨一些限制,如飛行過程中的高能耗和有限的負載能力。**因此,將雙足機器人與飛行機器人相結合或許能夠有效解決這些問題。
近日,加州理工學院的研究人員就打造了這樣一款機器人LEONARDO(LEgs ONboARD drOne,LEO),該機器人創造了一種新型的運動方式,兼具行走和飛行,靈活異常,且可以進行復雜的活動。
該機器人主要由三個子系統組成,分別是軀幹、四個以一定角度安裝在肩部的螺旋槳推進器、以及兩條配有 3 個驅動關節的腿。LEO 的重量為 2.58 千克,行走時整機高度為 75cm。
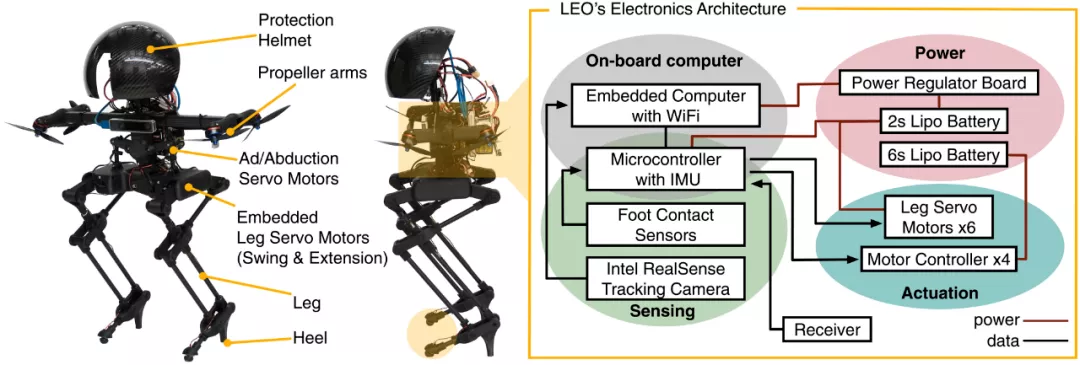
其中,**控制腿運動的是集成式直流無刷電機,裝在靠近腰部的位置,這樣可以減少腿的慣性。**腳尖部分是半球形的聚氨酯橡膠,這種材料摩擦係數很高可以防止滑倒。高跟鞋的設計也是為了儘可能減少面積和重量,同時在站立不動的時候能保持穩定。
LEO 的肩部有四個對稱安裝的螺旋槳,用於穩定和控制自身的行走和飛行運動。選擇螺旋槳的旋轉軸,以在正向和逆向兩個方向上生成飛行時質心(CoM)和行走時當前站立腳位置所需的滾轉、俯仰和偏航力矩。

LEO的開發實際是為了一些特定的應用場景,例如高壓線路檢修和高架橋檢測。這些任務靠人去做比較危險,而傳統的雙足機器人夠不着,無人機懸停時面對氣流擾動又不夠穩定,但LEO可以很好的完成這些任務。
值得一提的是,只要提供一個能站的平面,該機器人靠雙腿和螺旋槳的配合,哪怕是十分打滑平面也能保持穩定。LEO 的正常行走速度為 20cm/s,即 0.72km/h,在行走和斷續飛行同時進行時,速度會大大增加。
除了正常行走和飛行之外,LEO 還會一系列高難度的動作,如滑滑板和走繩索等,未來其或許能在一些高難、高危的場景中發揮作用。