端着咖啡走路是一項鮮為人知的物理學壯舉_風聞
返朴-返朴官方账号-关注返朴(ID:fanpu2019),阅读更多!2021-12-01 14:28
 如何將一杯咖啡從咖啡機端到工位?
如何將一杯咖啡從咖啡機端到工位?
或者將一碗豆漿從餐廳窗口端到餐桌?
甚至是如何把一勺番茄蛋湯從鍋裏舀入碗內?
——乾飯人的每天靈魂拷問
撰文 | 蕉蕉的奇妙冒險
對於聰明的人類而言,這不過是生存的眾多基本技能之一。(手:這不有我就行?)
 但對於物理學來説,端咖啡其實是一項了不起的壯舉!一切,都要從那兩隻擺鐘開始説起——
但對於物理學來説,端咖啡其實是一項了不起的壯舉!一切,都要從那兩隻擺鐘開始説起——
1 擺鐘之間的悄悄話
單擺是我們學習物理的過程中接觸的最早的模型之一。在單擺中,我們假設繩子一端固定,另一端連接一個質點,並假設繩子是沒有重量的,這樣所有的質量都集中一個沒有體積的質點上,對質點進行受力分析:該質點受兩個力的作用,一個是繩子的拉力,一個是重力,再加上繩子不可拉伸的約束條件,得到運動方程式為:
 因為sinθ的存在,這是一個非線性的常微分方程,在θ → 0 的情形下,我們可以做sinθ = θ的近似,這樣就將原來難以處理的非線性常微分方程,變成了易於處理的線性常微分方程。得到:
因為sinθ的存在,這是一個非線性的常微分方程,在θ → 0 的情形下,我們可以做sinθ = θ的近似,這樣就將原來難以處理的非線性常微分方程,變成了易於處理的線性常微分方程。得到:
 它的解為:
它的解為:
 其中θ₀,ϕ₀ 由單擺的初始狀態決定。這個解表明,單擺的角度正比於時間的正弦函數,這就意味着,單擺的運動具有固定的週期:
其中θ₀,ϕ₀ 由單擺的初始狀態決定。這個解表明,單擺的角度正比於時間的正弦函數,這就意味着,單擺的運動具有固定的週期:
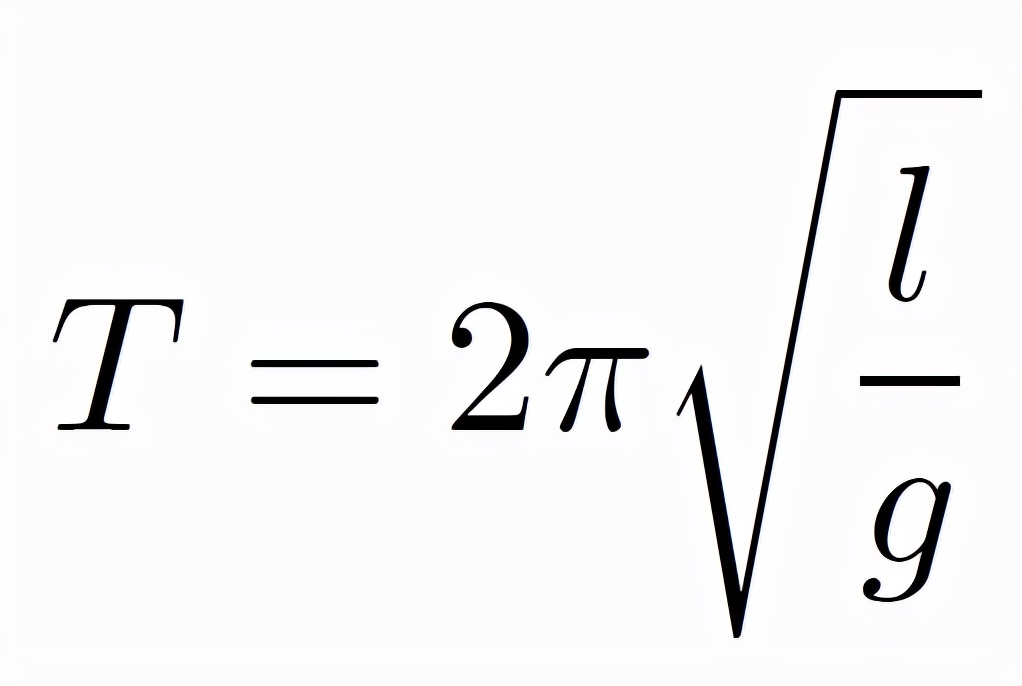 並且這個週期只由該地的重力加速度和繩子長度決定,與單擺擺動幅度,單擺末端的質點的重量沒有關係。
並且這個週期只由該地的重力加速度和繩子長度決定,與單擺擺動幅度,單擺末端的質點的重量沒有關係。
依據這種特性,1656 年,荷蘭物理學家克里斯蒂安·惠更斯,發明了擺鐘,用於解決航海中測量經度時的需要。航海中,人們可以通過天文學觀測,確定所到之處的緯度;如果有準確的計時工具,就能根據一個經度已知的陸地參考點的時間,確定所到之處的經度。為了讓擺鐘計時更加地精確,惠更斯計劃在船上放兩個擺鐘。沒想到,兩個素不相識的擺鐘竟然……
 ……竟然擺着擺着,開始默契的同步了,就像説了什麼悄悄話一樣(雖然相位是完全相反的,即擺動的方向剛好相反)。丨來源:YouTube@Veritasium
……竟然擺着擺着,開始默契的同步了,就像説了什麼悄悄話一樣(雖然相位是完全相反的,即擺動的方向剛好相反)。丨來源:YouTube@Veritasium
也就是説,兩個放在一起的擺鐘,雖然擺錘初始的位置不同,各自原本的週期也不同,但經過一段時間的擺動,竟然變得週期相同了。這種現象的產生是因為,兩個擺不再是獨立的擺動,而是通過連接他們的物體發生了相互作用,直到擺動趨於一致。這種現象被稱為同步(synchronization)。
 三個擺動雜亂的節拍器,通過與連接它們的複雜系統相互作用,最後擺動同步。丨來源:YouTube@Veritasium
三個擺動雜亂的節拍器,通過與連接它們的複雜系統相互作用,最後擺動同步。丨來源:YouTube@Veritasium
2 當你端咖啡時,你在做什麼
當一個人端着咖啡,小心翼翼的行進時,他究竟對這杯咖啡做了什麼呢?
中學的物理圖像可能會説,人給咖啡杯提供了向上的支持力。但實際上,當看到自己的咖啡在杯子裏來回震盪,時刻伴隨着溢出的風險時,人們並不會無動於衷。(就像小時候每次看到這則《媽媽洗腳》公益廣告時,小編都會有億點點揪心——這得灑了多少水在地上啊……)
 《媽媽,洗腳》的廣告中,小寶貝端的水灑了出去。丨來源:騰訊視頻
《媽媽,洗腳》的廣告中,小寶貝端的水灑了出去。丨來源:騰訊視頻
正如前面鐘擺所依靠的“第三方複雜系統”,端咖啡的人在咖啡與杯子之間也充當了這樣一個角色。此時,我們需要將杯子、咖啡和手的模型進行更加詳盡的刻畫。如果將杯子裏調皮的咖啡看成一個滾動的小球(如下圖(a)所示),那麼進一步在物理上,杯子與咖啡便可以抽象為“手推車”與“擺”的模型——這是因為,杯子裏小球總是貼着杯壁,其與杯壁圓弧所對應的圓心距離始終保持不變,相當於有一個不可伸長的繩子將其限制住(如下圖(b)所示)。我們可以將這個組合簡稱為“車-擺”模型。
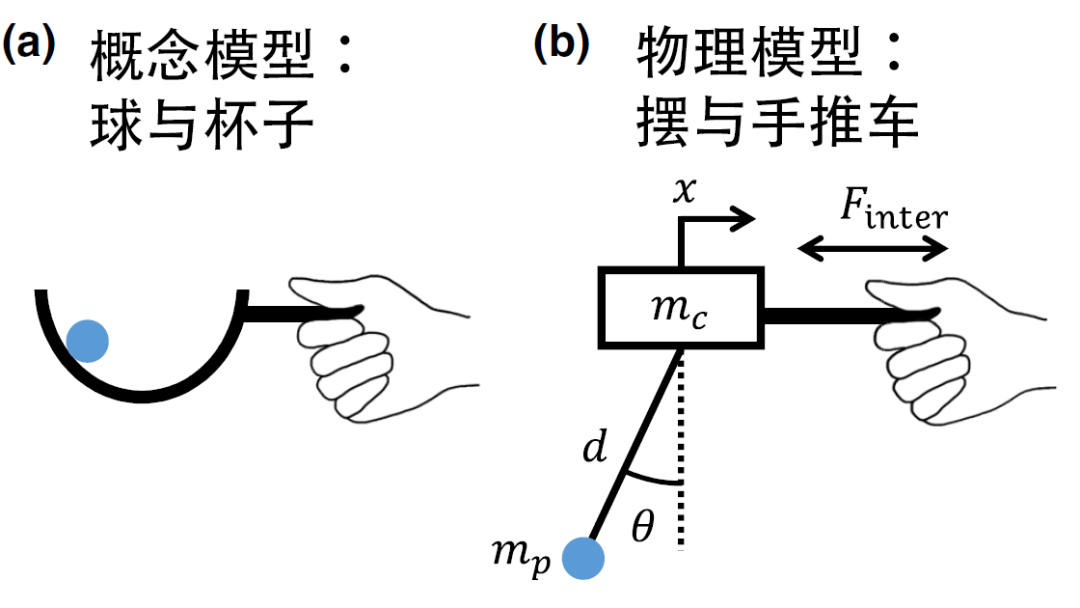 端咖啡的概念模型與物理模型示意圖丨來源:文獻[1]
端咖啡的概念模型與物理模型示意圖丨來源:文獻[1]
簡單來説,面對“想法不一致”的咖啡和杯子,人類的策略就是讓它們【同步】。
同步又分為兩種。一種是比較“激烈”的【反相同步】。當咖啡向右,趁其還未溢出時趕緊把杯子往左移;咖啡向左,就趕緊把杯子往右移。這樣,讓咖啡不停的在杯子裏來回震盪,只要你晃得夠快,咖啡就會被杯壁擋回來。這便是“高頻”的反相同步策略——咖啡震盪的相位和咖啡杯移動的相位總是相反。
 對牆擊球時,手與球之間就是反相同步。手和牆=咖啡杯壁,球=咖啡丨來源:bilibili @東南排球訓練營
對牆擊球時,手與球之間就是反相同步。手和牆=咖啡杯壁,球=咖啡丨來源:bilibili @東南排球訓練營
相反的,另一種【同相同步】則更加温柔。當咖啡要向右了,就讓杯子追隨咖啡的步伐,也向右移動——畢竟咖啡不會無限的向右移動(因為咖啡同時也向上移動,動能轉換為勢能而使速度降低),杯子移到一定的位置時咖啡也就停止向右的躁動了;當咖啡開始向左,故伎重演,讓杯子追上其向左的步伐便是,不必驚擾咖啡。在這種情況下,杯子移動的沒有那麼快,而移動的方向卻與咖啡始終保持一致,所以是“低頻”的同相同步策略。
 湯姆端盤子時,身體和盤子就是同相同步。湯姆=咖啡杯,盤子=咖啡丨來源:youku@核桃話綜藝
湯姆端盤子時,身體和盤子就是同相同步。湯姆=咖啡杯,盤子=咖啡丨來源:youku@核桃話綜藝
反相高頻和同相低頻,還可以藉助擺長與頻率的關係進一步理解。在“車-擺”模型中,反相與同相分別如下圖(a)和(b)所示。由於車一直在移動,兩種同步運動的等效擺長不同。反相同步的等效擺長明顯小於同相同步的等效擺長,由上一節的頻率與擺長關係可知,擺長越短,週期越小,頻率越高。因此反相同步為高頻、同相同步為低頻。
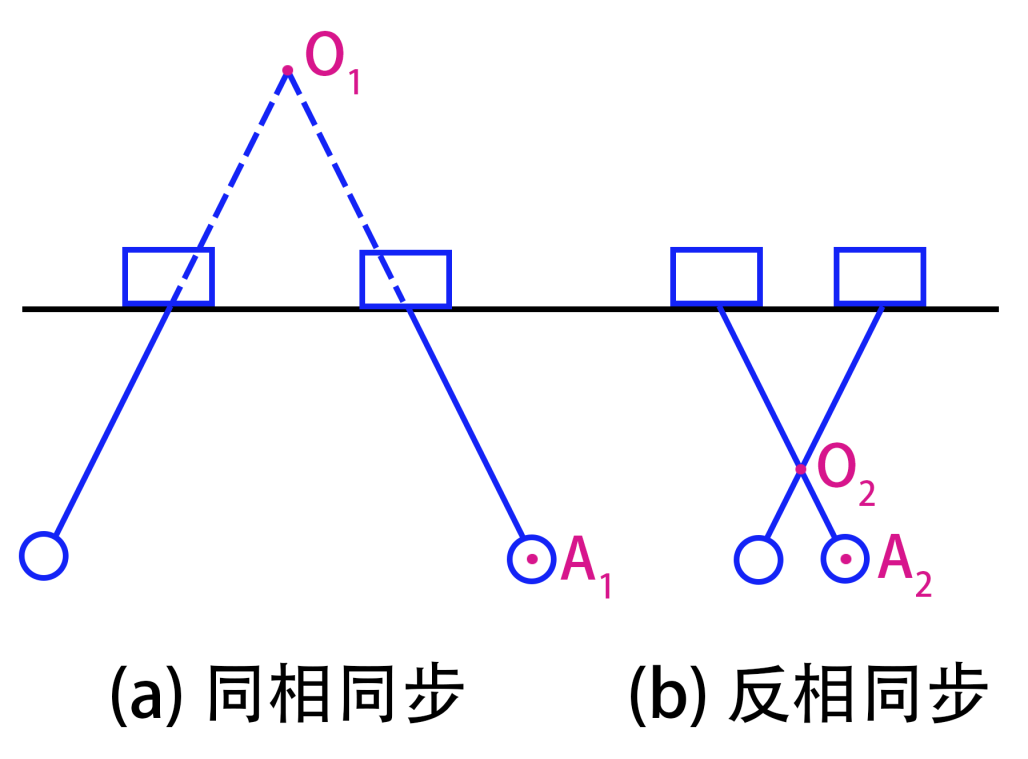 兩種同步運動的等效擺長示意圖
兩種同步運動的等效擺長示意圖
實際上,聰明的人類很有可能在不自知的情況下,熟練的在兩種同步模式之間無縫切換——僅憑觀察力和直覺,便能在端咖啡挑戰中隨機應變。但是,如果要設計端咖啡的機器人,我們改如何賦予它這個看起來理所應當的技能呢?
針對端咖啡的兩種同步策略進行建模計算,研究者發現,同相與反相同步之間還存在一個【過渡區域】。這種過渡區域是由動力學系統的非線性所導致的。如果機器人被設計成以相對較小的步幅行走,將對應一個較小的週期外力,這時候動力學方程可以近似為線性,兩種同步運動間不存在過渡區域,因此行走的頻率可以是任意的;當機器人被設計成以較大的步幅行走時,對應較大的週期外力,這時候,在同相同步與反相同步之間存在一個不同步的過渡區,則行走的頻率應該儘量避開這個過渡區的頻率,以免咖啡與杯子發生不同步。
 大步幅vs.小步幅丨來源:bilibili
大步幅vs.小步幅丨來源:bilibili
3 無處不在的同步現象
除了端咖啡,同步現象無處不在:天空的飛鳥羣只能知道相鄰飛鳥的情況,卻最終能實現整個飛鳥羣整齊的飛行——
 鳥羣的同步丨來源:YouTube@Veritasium
鳥羣的同步丨來源:YouTube@Veritasium
每隻螢火蟲都有自己獨有的發光頻率,而當螢火蟲的密度大到一定程度時,他們就會同步發光——
 螢火蟲閃爍的同步丨來源:YouTube@robin meier
螢火蟲閃爍的同步丨來源:YouTube@robin meier
我們都聽説過軍隊在橋上齊步走,會因為與橋發生共振而導致危險。但是,沒有受過訓練的旅客在橋上也可能齊步走。這是因為,每當旅客邁出一步,就會讓給橋在側向有一個微弱的力,這個微弱的力造成的橋的運動狀態的改變又會影響其他旅客的腳步,於是旅客們的步伐通過橋相互影響,最終達成了同步。
 2000年6月,泰晤士河上350米長的“千禧橋”出現明顯擺動。丨來源:YouTube@Veritasium
2000年6月,泰晤士河上350米長的“千禧橋”出現明顯擺動。丨來源:YouTube@Veritasium
這些例子中每個個體都只能感受到自己附近的情況——這相對於整體來説很小;但卻能夠實現整體上的同步,這便意味着,整體不是部分的簡單加和。個體在組成整體時,因為相互作用的存在,會湧現出新的現象和規律,這些現象和規律是無法通過觀察個體發現的。這正是非線性的特點。我們都知道,在線性關係中,各變量間是互不相干的獨立關係,滿足疊加原理(整體等於部分之和);而非線性關係則有相互作用,正是這種相互作用,使得整體不再是簡單地等於部分之和,還需要考慮各部分之間的耦合作用。當一個人端咖啡的時候,他便是咖啡與杯子耦合作用的來源。這也正是諾獎得主菲利普·沃倫·安德森所説的:量變引起質變(More is different)。
用線性的方式看待世界,可以讓事物變得更簡單——再大再複雜的系統,也可以分解為許多簡單個體的加和;但用非線性的方式看世界時,卻能讓事物變得更美妙——畢竟,每天一個小壯舉,誰不愛呢?
參考文獻
[1] Phys. Rev. Applied 16, 034012 (2021) - Synchronous Transition in Complex Object Control (aps.org)
[2] Walking with coffee is a little-understood feat of physics
[3] Predictability, force, and (anti)resonance in complex object control | Journal of Neurophysiology
[4] Stability and predictability in human control of complex objects: Chaos: An Interdisciplinary Journal of Nonlinear Science: Vol 28, No 10 (scitation.org)
[5] 非線性 百科 (quark.cn)
[6] The Surprising Secret of Synchronization - YouTube
[7] Fireflies in the Woods relaxation meditation Natural Sounds & Music - YouTube
本文經授權轉載自微信公眾號“中科院物理所”。特別鳴謝:平平無奇小葉榕;封圖背景來源:bilibili;表情包來源:網絡;編輯:蕉