百變金剛“中國臂” 再現太空黑科技
11月8日凌晨,航天員翟志剛、王亞平安全返回中國空間站“天和”核心艙,至此,神舟十三號航天員乘組第一次出艙活動取得圓滿成功。出艙活動中,被稱作百變金剛“中國臂”的空間站核心艙機械臂再次耀眼太空,引發關注。
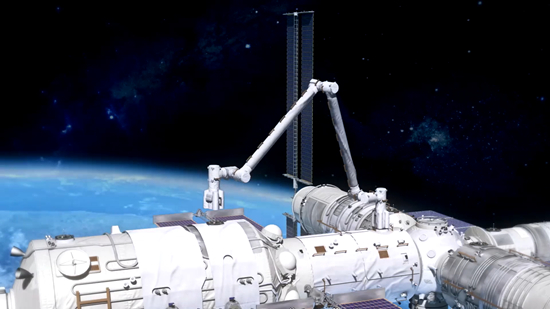
核心艙機械臂展開長度為10米,最多能承載25噸的重量,是空間站任務中的“大力士”,其主要承擔艙段轉位、航天員出艙活動、艙外貨物搬運、艙外狀態檢查、艙外大型設備維護等8大類在軌任務。
據中國航天科技集團五院空間站機械臂飛控負責人高升介紹,空間站核心艙機械臂是我國首個可長期在太空軌道運行的機械臂,其肩部設置了3個關節、肘部設置了1個關節、腕部設置了3個關節,一共7個關節,每個關節對應一個自由度,就如同人的手臂一般,具有較為靈活的活動能力。
“在這次出艙活動中,核心艙機械臂託舉航天員到達指定位置開展出艙操作,順利完成了‘機械臂級聯裝置’的安裝工作,為後續實現‘擎天巨臂的組合’打下紮實基礎。”高升説。
打通“任督二脈”
據高升介紹,空間站機械臂由“天和”核心艙機械臂和“問天”實驗艙機械臂組成,前者是大臂,後者是小臂。
按照空間站關鍵技術驗證及建造階段的任務規劃,實驗艙機械臂將隨“問天”實驗艙一起發射入軌,並將在太空中與“天和”核心艙機械臂完成“大小臂在軌組合”。要實現這一操作,並不容易。
高升告訴記者,核心艙機械臂長度為10米,實驗艙機械臂長度為5米,兩者“體型”差異較大,端口設計有較大差別。如何做好兩個機械臂的對接,實現“1+1=“1””的效果,對研製團隊來説是一個巨大的創新難題。
此次出艙活動的重要“配角”——“機械臂級聯裝置”,由“雙臂組合轉接件”和“懸掛裝置”組成,是空間站機械臂實現組合動作的關鍵裝備。其中,“雙臂組合轉接件”更是被研製人員形象地比喻為“宇宙級機械臂轉接頭”。
“有了雙臂組合轉接件這個‘宇宙級機械臂轉接頭’,不僅可以‘四兩撥千斤’,有助於完成兩個機械臂的接口互連,還可以實現兩者間電氣和信息的互通,在惡劣的太空環境中安全打通兩個機械臂之間的‘任督二脈’。”高升説。
他告訴記者,隨着我國空間站建設順利推進,“雙臂組合轉接件”將幫助兩個形態截然不同的機械臂,完成轉接,保證組合機械臂具備承載更大載荷進行大範圍轉移的能力。
收“刀”回“鞘”
那麼,“雙臂組合轉接件”和“懸掛裝置”之間到底是什麼關係?
中國航天科技集團五院空間站機械臂懸掛裝置主管設計師高翔宇打了個比方:如果把“雙臂組合轉接件”比作“刀劍”,那麼“懸掛裝置”就是“刀鞘”。
在11月7-8日的出艙活動中,航天員需要先在“天和”核心艙艙壁上安裝“懸掛裝置”,並確認抱爪結構,用於捕獲和存放“雙臂組合轉接件”,為後者提供電源。
完成“懸掛裝置”安裝後,航天員翟志剛輕推“雙臂組合轉接件”進入卡口位置。這時,“懸掛裝置”則在指令的遙控下,通過抱爪結構將“雙臂組合轉接件”抓住,並將其“擁入懷中”。
高翔宇告訴記者,未來,當空間站的兩個機械臂開展對接工作時,“天和”核心艙機械臂將主動探向“雙臂組合轉接件”,通過末端視覺相機識別靶標,將其從“懸掛裝置”上精準取出,進而完成與“問天”實驗艙機械臂的組合,形成更長、更穩定的靈巧型空間機器人。
“這不僅是世界首次,更是中國智慧的重要體現。”高翔宇説。
到那時,空間站機械臂的總長度,將拓展至14.5米,活動範圍可直接覆蓋空間站三個艙段,隨時實現對空間站艙體表面的“巡檢”。在完成在軌任務後,空間站機械臂又要回到大小機械臂兩個部分,這時,“雙臂組合轉接件”自然是收“刀”入“鞘”——由核心艙機械臂將“雙臂組合轉接件”重新放回“懸掛裝置”之中。
中國航天科技集團五院空間站機械臂雙臂組合轉接件主管設計師朱超憧憬着兩個機械臂組裝起來的壯觀模樣,他説,“在空間站未來完成三艙組合後,航天員出艙任務大部分將由組合臂的形式完成,進一步向世界展示着中國智慧。”
2021年11月09日 12 版