為什麼連排級的無人機只能是電動的_風聞
晨枫-军事撰稿人-古今多少事,都付笑谈中2022-03-25 07:21
無人機改變了戰場,但無人機有各種各樣。有的無人機只是有人機的小型化、無人化,比如“死神”、“火力偵察兵”,有的就是完全新質、沒有有人機對應的多旋翼及其變異,如各種大疆和新流行的eVTOL。

MQ-9“死神”是小型化、無人化的固定翼飛機

MQ-8“火力偵察兵”就是小型化、無人化的直升機

各種大疆是典型的多旋翼無人機,在有人飛機裏沒有對應

Elroy Air這樣的eVTOL是固定翼和多旋翼的混合,航程和載重比純多旋翼更大,但也更復雜
小型化、無人化的有人機實際上還是較大,在飛機特點和使用上和有人機沒有原則區別,一般也用渦槳、渦軸、內燃機作為動力,載重、航程都大,成本也高。
真正得到大發展的是多旋翼無人機,既可以是大疆這樣的純多旋翼,也可以是與固定翼混合的多旋翼,也稱eVTOL。這是真正新質的,但也無一例外地為電動的。載重、航程較小,但成本低得多,使用更加便利。
固定翼和直升機的特點很清楚了。固定翼的起飛重量更大,速度更快,航程更遠,升限更高,油耗更低,維修簡易,但需要跑道才能起飛、着陸。顯然,連排級的野戰軍肯定伺候不了,不可能到處都找到跑道。直升機正好相反,哪裏都能垂直起飛、着陸,還能做懸停、側飛、倒飛、筋斗等特殊機動,但這是複雜的槳轂為代價的。看看那堆零碎,都是高磨損的活動部件,都需要高強度維修,都對惡劣環境敏感。連排級的野戰軍也伺候不了。
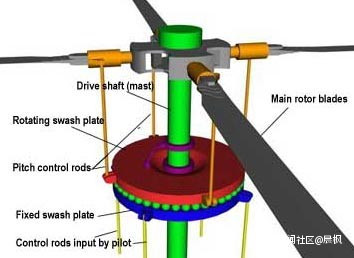
這是槳葉系統的簡化示意圖
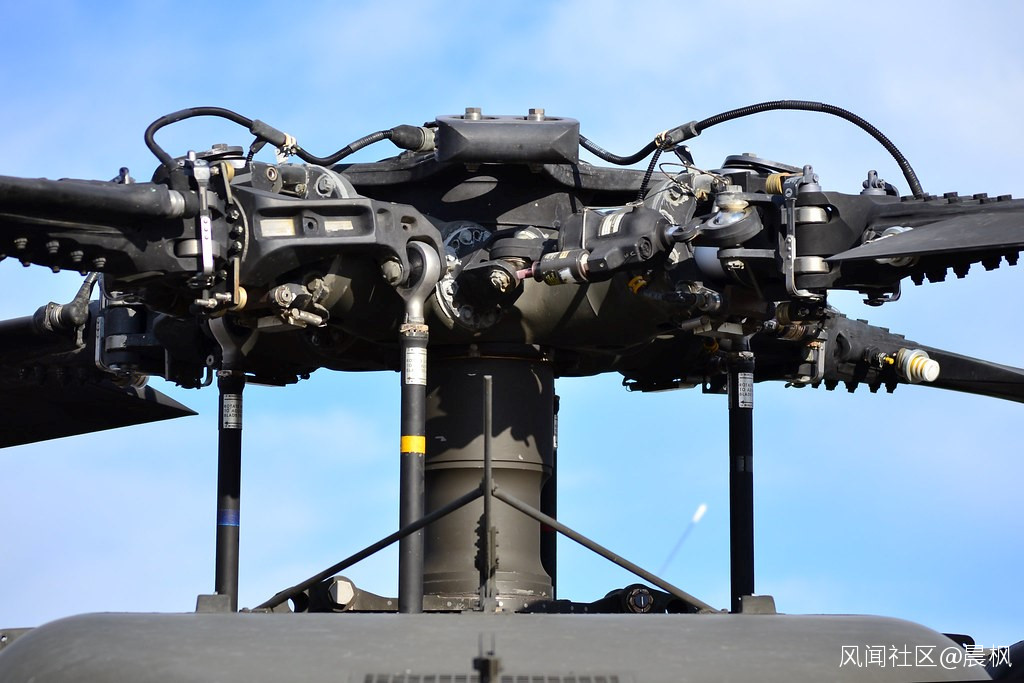
黑鷹直升機的槳轂,傾轉滑盤(上圖紅盤和藍盤)在下面,看不見,那裏還一堆囉嗦玩意。尾槳那裏簡單點,不需要滑盤,但還是一堆囉嗦玩意

相比之下,大疆這樣的多旋翼就簡單得“不講武德”了
直升機的旋翼不僅在轉動中通過與空氣的相對運動產生升力,還要通過槳盤的水平或者傾斜實現懸停、產生推力和實現各種特殊機動。為了補償旋翼的扭矩,還需要尾槳提供反扭力。使得槳盤可控傾斜是伊戈爾·西科斯基的劃時代發明,其中的關鍵是一對可傾轉的滑盤。
滑盤分上下兩部分,下滑盤是可在連桿控制下傾斜,但不轉動;上滑盤隨槳葉轉動,同時在貼面作用下“被迫”隨下滑盤傾斜,帶動連桿控制槳葉在旋轉中的上下揮舞,使得槳葉葉尖形成的軌跡(槳盤)傾斜,形成推力、側力等。
槳葉與槳轂需要通過揮舞鉸連接,這是高載荷、高循環的活動部件。槳葉也有總距鉸,控制槳葉相對於旋轉方向的迎角,控制升力。槳葉轉速的大小是改變升力的,但發動機的轉速範圍有限,需要與迎角相結合,才能達到升力控制的全範圍,就像汽車發動機需要通過變速器才能控制全速度範圍一樣。這是又一個高載荷活動部件。連桿與滑盤和槳葉的連接也需要通過鉸鏈。這麼多高載荷活動部件的磨損很大,維修工作量很大。新型無鉸槳轂用彈性部件代替部分鉸鏈,只是轉移了問題,把機械磨損變成材質老化了。
直升機的麻煩還不止這些。直升機需要反扭矩的尾槳,尾槳驅動不僅需要動力轉遞,還需要與主旋翼同步,所以長長的驅動軸不僅重量、磨損是問題,還特別怕損壞。大部分直升機失事都是因為尾槳故障後的失控。
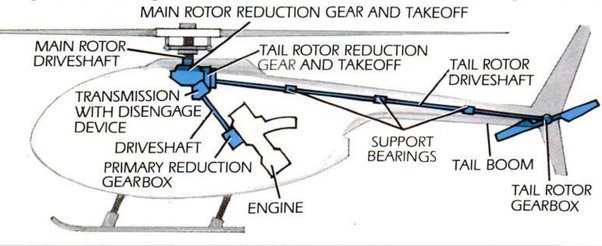
尾槳的動力從主旋翼減速器引出,長軸需要在中間有支承軸承,避免下垂和轉動時的抖晃,但增加磨損
各種雙槳可以免去尾槳,但卡莫夫那樣的共軸反轉雙槳需要軸套軸,而且為了避免上下旋翼在揮舞中互相碰撞,需要增大間隔,增加阻力,增加結構剛性的要求,更要命的是,旋翼控制機構更加複雜。找任何一架卡莫夫來,看看槳轂,不頭皮發麻算你贏。

卡莫夫的共軸反轉雙槳需要雙套槳轂機構,還有軸套軸的問題,世界上只有一家玩這個,不是沒有道理的
CH-47那樣的串列雙槳不僅有雙套滑盤、鉸鏈、連桿的問題,還需要把發動機的動力彙總後,用傳動-同步軸分配到前後旋翼,而不是兩台發動機分別驅動前後旋翼。只有這樣,才能保證前後旋翼同步。長長的大功率傳動-同步軸穿過整個機頂,這是又一個維修人員問候設計、製造方先人的地方。單旋翼-尾槳也有常常的傳動-同步軸,但功率一大,幺蛾子就多啊。
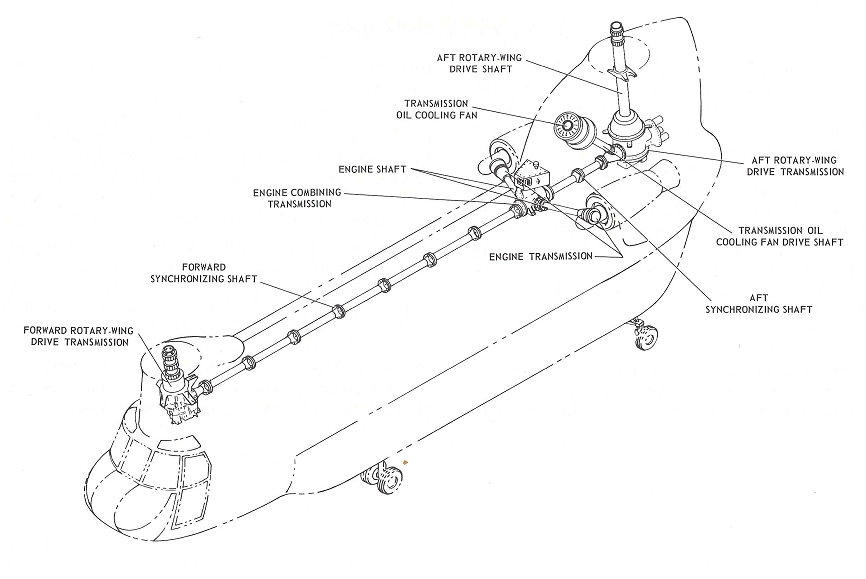
CH-47用串列雙槳,需要貫穿全長的大軸進行動力傳遞和同步,重量和磨損很厲害
MV-22那樣的傾轉旋翼並列雙槳看似簡單點,但根本不簡單,因為還是有直升機模式下的操控問題。左右雙發之間還有複雜的交聯傳動-同步軸,不僅確保同步,還在兩側發動機出力不均勻或者單發停車時能驅動兩側旋翼,繼續飛行。否則並列雙槳一旦單發故障,立刻失控墜毀,連挽救的時間都沒有。發動機短艙傾轉的複雜性、可靠性和直升機-飛機模式轉換的飛控問題就不多説了。
簡言之,直升機機械上的那麼多麻煩事是由於集中動力的關係。不管是渦軸還是內燃機,發動機沉重,成本高,機械同步困難,只能集中動力,然後用各種辦法保證同步。再白菜化,直升機只能是魚子醬煮白菜,註定機械複雜、使用麻煩、購置和運作成本高。
在討論無人機問題的時候,必須牢記成本和體系。
中國是無人機大國,什麼無人機都造得出來,而且成本一定低於歐美國家。但這還不夠,碾壓性優勢還不夠,要氣化級優勢嘛。
多旋翼沒有那麼多事。對角上的旋翼自然抵消互相的扭力,多旋翼的各種“抬壓”自然控制姿態和前飛、側飛、倒飛,翻筋斗更是不在話下。
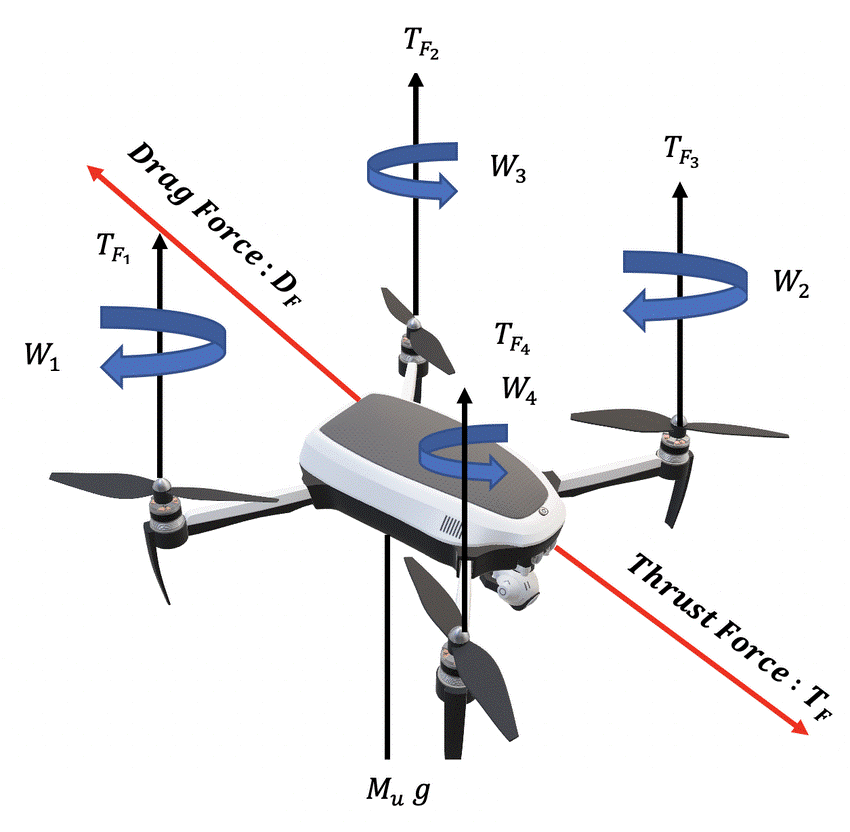
多旋翼的旋翼總是成雙作對的,不僅兩兩抵消反扭力,還便於控制姿態
在理論上,多旋翼依然可能採用集中動力,但各種同步軸將使得機械複雜性之高、重量之大、可靠性之低達到不可思議的程度,徹底抵消了任何好處。必須採用分佈動力。
電池動力的電動與多旋翼是天生的一對。電動機的轉速範圍很大,特斯拉就不需要變速器,一檔到底,這就省卻了總距鉸。用旋翼之間相對升力控制姿態,這就省卻了揮舞鉸。
多旋翼的槳轂簡單得不能再簡單了,簡單的驅動軸直接連到無鉸鏈、固定槳距的旋翼,這是多旋翼低成本和實際上無維修的第一秘訣。
電動機之間同步簡單多了,用電氣和電子方法實現,不需要任何機械同步,這是多旋翼低成本和實際上無維修的第二秘訣。
電池動力的問題是電池重量和容量。這是多旋翼較難做大的攔路虎,但不是沒有辦法的,油電或者渦電啊,功率更大,續航時間更長。
油電就是用內燃機驅動發電機,油耗較低;渦電則用渦軸驅動發電機,功率更大。問題是交流發電容易,但交流電動機要變速,需要一套複雜的變頻系統。直流發電本身就較複雜。全系統的重量、複雜性急劇升高,完全抵消了無人機的簡單、低成本、無憂慮使用的優點。
渦電作為航空動力正在得到高度重視,但重量、複雜性和成本使得這還在很長時間裏不適合在低成本無人機使用。還是隻能電池動力。
電池動力的多旋翼成本低,使用簡單,已經成為人們對無人機的認知。要在連排級部隊裝備大量無人機,只能是這樣的無人機,不可能是油機。
空軍、海軍的無人機是完全不同的要求,不去説它。陸軍的集團軍、合成旅級也是不同的要求油機無人機或許更加合適。連排以下的甚至到班和個人的,首先數量巨大,而且是半可消耗的,對成本必須敏感;其次小分隊里人手緊張,沒法伺候。必須是使用最簡單、攜帶最方便、結構最皮實、無維修、性能夠用的。還是隻有電池動力的多旋翼。
唯一例外可能是彩虹817這樣的微型無人機。這是很特別的設計,以前專門寫過一段,這裏不重複了。這對班用甚至單兵使用很好,但結構上決定了只能是這樣的微型的,能力有限,連排用有點不夠給力。
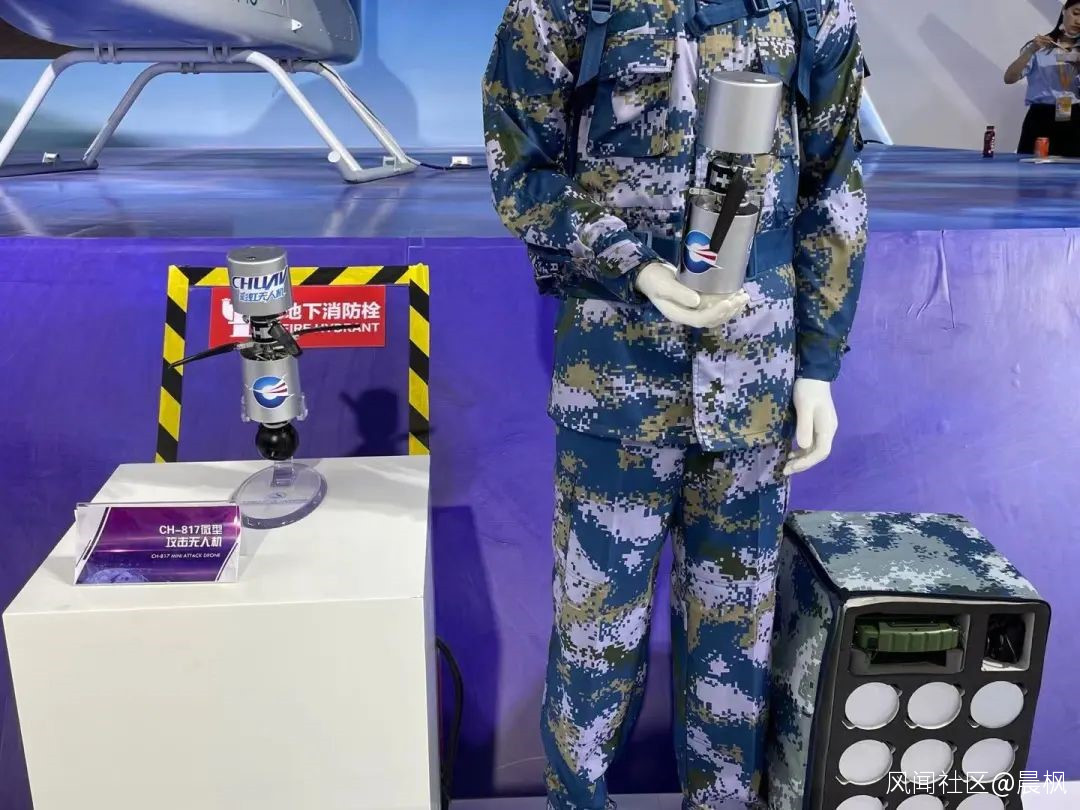
彩虹817是非常有潛力的微型無人機,但在本質上就做不大,班用很好,連排級有點嫌小了
eVTOL是多旋翼和固定翼飛機的獨特組合,因此動力系統也可以更加靈活。多旋翼部份肯定是電動的,但固定翼狀態下的推進可以用普通的內燃機或者渦槳驅動,同時為電池充電,用於短時間的垂直起飛和降落。
eVTOL對於合成旅偵察連這樣的“專業單位”很適合。在平飛狀態下,速度、航程比直升機或者多旋翼大得多,但可以垂直起飛、着陸,比固定翼無人機更容易運作,機械和維修簡單,不需要太多伺候,但對於營以下的分隊還是太大、太費事了。
單兵巡飛彈在很多方面符合要求,但只能一次性使用,成本還是高。戰爭不是隻要打贏就行,還需要在對經濟和社會負擔最小的情況下打贏,這才是真贏。在不影響任務完成的情況下,成本最低的手段才是最好的手段。這也是飛機投炸彈不可能被導彈所取代的原因,無動力或者短程武器的成本大大低於遠程武器。單兵到連排級也是一樣。巡飛彈很有用,但不是無人機的替代。
即用即扔實際上也是很大的後勤負擔,在前方大體確認有敵情、只是需要查明、攻擊時使用比較合適。否則機步連沿道路搜索前進,以巡飛彈作為前方偵察、搜索工具的話,一天可能就要消耗十幾個、幾十個巡飛彈?有的巡飛彈是可回收的,沒有自爆就收回來,充電後下次使用。這和可消耗無人機沒有兩樣了。

“折刀”是典型的單兵巡飛彈
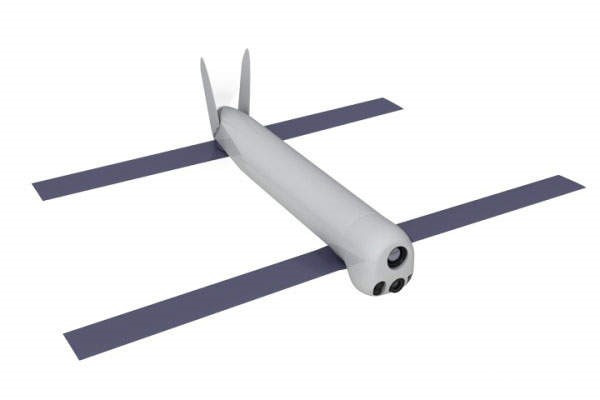
發射後自動打開,就成了一架微型固定翼飛機
巡飛彈一般相當於微型固定翼飛機,可以盤旋,但不能懸停和抵近觀察。在特別狹小的街道上和建築之間不便使用。一掠而過有時不能仔細觀察,懸停和抵近觀察常常是不能取代的。多旋翼、垂直起飛着陸的無人機還是必要的。
充電是個問題,但這不是無人機獨特的問題。士兵數字化後,夜視儀、單兵數據鏈、激光測距-照射儀、敵我識別器(Blue Tracker)都需要充電。新一代軍車大到步戰,小到悍馬級,發動機都額外強化,具有更大的發電能力,車上座位都有充電口。這是10年前的軍車都不具備的,但也是現在新一代軍車必備的。
徒步步兵比較麻煩一點,但他們的麻煩不只是充電了。背上一大堆巡飛彈一樣不現實,還是需要某種隨行的戰術拖車或者什麼東西來解決。