浙大科研團隊,無人機集羣領域實現重大突破_風聞
极客公园-极客公园官方账号-2022-05-20 10:44
距離城市無人機物流和科幻電影中的無人機艦隊,我們又近了一步。
作者 | 陳晨
編輯| 鄭玄
十架無人機在密集的竹林裏穿梭。
如同組織有序的蜂羣,無人機羣有條不紊,越過崎嶇起伏的地面、穿過傾倒交錯的竹子間狹窄的空隙,伴隨着「嗡嗡」聲,它們軌跡平滑地從一個間隙連接到另一個間隙,一個個藍色的身影穿過碧綠的竹林,最終整齊地懸停在竹林外。
它們不是《安德的遊戲》中抵禦外星人攻擊的無人機艦隊,也不是《銀翼殺手 2049》裏在摩天大樓間參與空中交通的一員,它們沒有武器,也還沒有領到搜救或運輸的任務,但是卻出現在現實世界中,就在湖州安吉的一片竹林裏。
十架無人機穿越竹林
5 月 5 日這天,浙江大學的周鑫等人於《科學·機器人》期刊發表最新研究成果,經過兩年多的研究,科研團隊解決了未知複雜環境下,機器人單機與羣體的智能導航與快速避障方法等一系列核心技術難題,成功研發出自主導航的集羣飛行系統。
這無疑是項「卓越」的成就。瑞士洛桑聯邦理工學院智能系統實驗室的 Enrica Soria 在《科學機器人》雜誌上評論這項研究時説:「這項工作為機器人領域作出了重大貢獻,也朝着無人機羣在實驗室有限環境之外的應用方面邁出了重要一步。這樣一來,無人機羣不僅能在森林中探索,也能在人造環境、如由人類和建築物組成的城市區域執行一系列重要任務。」
在通向想象中那個「未來」的路上,人類的腳步又加快了一點。
01
從單體智能向羣體智能
智能是無人機起飛的「基石」,而從單體智能向羣體智能發展,則是近年來的大趨勢。
賓西法尼亞大學的實驗室裏,Vijay Kumar 和他的團隊受到蜜蜂的啓發,在機器人上搭載機載傳感器、攝像頭和激光掃描儀,藉以掃描分析環境中的特徵信息,形成地圖,讓機器人以無碰撞的方式實現導航。
到了 2017、2018 年,無人機自主導航實現了從室內到室外的躍遷。從農場到樹林,無人機完成了對目標的追蹤、搜索,及自主航線規劃。
這些年裏,單體無人機自主導航在工業和學術實踐中得到了快速的發展,但截至目前,空中集羣系統的「智能化」還處於初級階段。能夠支持大規模成熟應用的無人機空中集羣,如無人機燈光秀,仍然是在全球導航衞星系統定位下,遵循預先編程的軌跡完成表演。

無人機編隊表演
無人機領域的「智能集羣」其實基於生物集羣行為。
1959 年法國生物學家 PierrePaul Grasse 發現昆蟲之間存在高度結構化組織,能夠完成遠遠超出個體能力的複雜任務。一些智能集羣算法也在後續對昆蟲間智能集羣行為的探索中逐漸湧現出來,比如 20 世紀 90 年由意大利學者 Dorigo、Maniezzo 等人提出,應用於組合優化問題的蟻羣算法。
據周鑫等人在文章中介紹,無人機領域現在有兩種主流的導航方法:一種模仿昆蟲,一種模仿鳥類。
「昆蟲」長於短時反應,在計算和內存佔用上更為高效,能夠讓無人機更為輕巧;「鳥類」鳥類更喜歡相對長期的平穩動作,更可能得出最佳路徑也更為靈活。
現有的一些無人機智能集羣方案大都使用了這兩種方法,比如一些研究者嘗試使用簡單的反應規則,讓飛行機器人根據其他機器狀態實時調整其運動。這種方式的弊端也很明顯——缺乏對最佳性的考慮,容易導致飛行器行動不連貫,需要更大的安全距離。有些實現了對鳥類行為的模擬,但操作各個個體又顯得尤為困難。
更多的優化方案不斷地被提出,如 McGuire 等人提出了一種反應性羣體梯度錯誤算法,使用光流定位和激光測距傳感器進行障礙物檢測,並將所有傳感、決策、控制的功能部件集成到 30g 之內。周鑫他們團隊也曾提出了 EGO-Swarm,一種部署在森林中的空中集羣全棧導航解決方案。
擺在這些研究者面前的問題都是相同的:如何在各種規劃路徑中得到最優解?如何提高方案的可擴展性,兼容更多任務及目標?如何實現更「經濟」的計算,為其他任務保留儘可能多的可用資源?如何實現更小的體積與重量,以提高飛行時間、適用複雜及狹窄的地形?
困擾他們的還不僅僅是單個問題的解決,這四個目標往往就是互相矛盾的,比如最優解依賴複雜的建模與不同方案的迭代試驗,而這樣會增加計算成本;提高可拓展性意味着以更通用的方式來定義問題,而這又犧牲了對潛在特殊問題的優化,可能與最優解失之交臂。在這種情況下,如何實現全局的優化顯得尤為困難。
在研究了各種方案後,周鑫等人將軌跡規劃定義為重點問題,因為「它不僅改變軌跡的形狀(是否平滑),而且能調整時間曲線,以充分利用可解的方案,最大化無人機的能力。」
在昆蟲與鳥中,他們選擇了後者,他們將鳥類這種長於軌跡規劃的能力,歸因於鳥類相比於昆蟲更敏鋭的視覺和運動感,更高自由度的運動系統,和更多的大腦容量。
02
向鳥類學習,
造多個「智慧大腦」
「巧合卻又合理的是,我們提出的解決系統十分類似於鳥:能夠在能夠在森林中自由飛行,同時避開障礙物和其他移動的生物。」
他們團隊也為無人機造了一個「智慧大腦」,儘管處理器只有拇指大小,卻能獨立計算處理飛行過程中的海量信息。
鳥類為了避免碰撞,會同時調整路徑和速度,這種時空軌跡聯合優化的方法,也被他們用在了智能集羣的解決方案裏,它的優勢也在他們的實地實驗中得以展現。
在無人機穿越竹林的實驗中,無人機時常需要穿過狹窄的間隙,而在左右也有無人機的情況下,一般方法是調整機體的高度避免碰撞。調整高度除了會浪費資源外,還會遇到下衝干擾,而他們方案是:調整時間配置文件,允許多架無人機僅改變必要的速度,然後依次通過間隙。
這種時空軌跡聯合優化的難點在於:空間和時間參數共同確認軌跡,但二者是高度耦合的,這也導致需要大量的時間來計算,才能確認最優軌跡。他們給出的解決方法是將目標函數計算中的時空參數解耦,實現優化變量與表示軌跡的中間變量之間的線性複雜度映射,從而實現實時時空優化。
在這套軌跡規劃的框架下,他們還將所有目標和約束條件轉換為加權懲罰,通過「加權」的方式實現對不同目標及約束條件重要性的排序,用户可以預先添加特定於任務的目標及約束條件。
他們將這套方案與兩個已知的最為先進的規劃方案進行了基準比較,一個是 MADER,一個是他們自己之前提出的方案 EGO-Swarm。
在測試場景中,無人機需要以 2 m / s 的速度飛越狹窄的大門和分佈眾多障礙物的區域。MADER 和 EGO-Swarm 都因為避免碰撞,出現了無人機等待或繞道的情況,而他們現有的方案卻通過調整不同無人機的時間軌道,在避免碰撞的前提下,讓無人機以最為平滑的方式通過,這種機體的較小變動則進一步保證了安全。
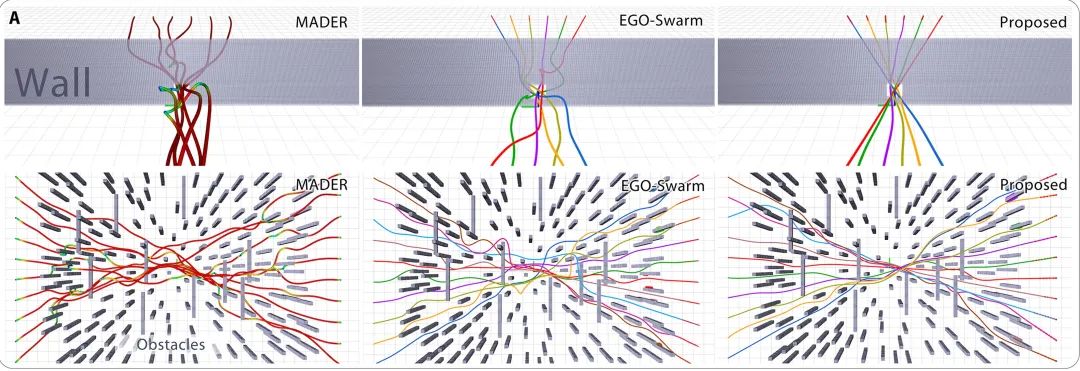
三種方案中,無人機通過窄門及障礙物區域的軌跡圖
鳥羣編隊前行的方式同樣給了他們靈感。
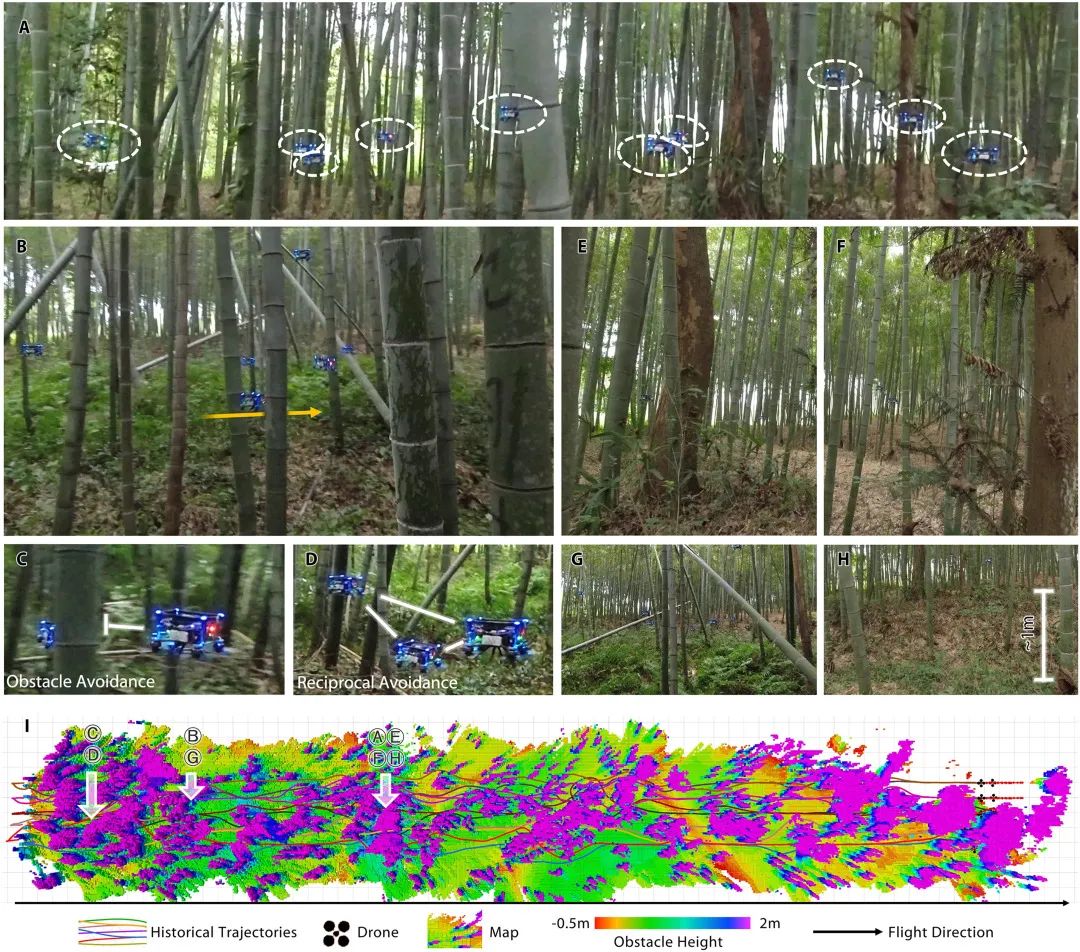
他們其中的一個實驗是野外編隊導航,要求十架無人機保持方形編隊在樹林中飛行。鳥類提供了一個「非常識」的經驗,即編隊飛行中,不能有預先設定的形狀。
從他們的實驗中可以看到,編隊通過矮叢和障礙物時並不總是保持規整的方形,有時無人機必須偏離前面的障礙物,然後再加快速度趕上編隊。

正在測試中的無人機羣
而且當無人機避開樹木時,平均速度會自動下降,當它們完全回到開闊空間時,平均速度會增加。一些個體的速度變化在沒有預編程的情況下,傳播到了整個編隊。
他們還在每架無人機上獨立運行着視覺慣性里程計測距(Visual Inertial Odometry),以進行空中羣體定位,並開發了一種分散的漂移校正算法以最小化誤差,以避免碰撞。與之對應,鳥類在短程導航中主要依靠眼睛及前庭系統。
單體與羣體智能的協調還體現在很多方面,比如每架無人機都配備了完整的感知、定位、規劃和控制功能,並通過一個高保真無線通信的廣播網絡共享軌跡,高速計算用於快速規劃,以此實現鬆散耦合,提高整體運行的穩定性。
03
一個「遊樂場」,
一方「試驗田」
周鑫他們團隊在四種場景中完成了測試,除了上述介紹的飛越茂密竹林、野外編隊導航之外,還有高密度場景下的相互迴避測試,在目標遮擋場景下的多無人機跟蹤。
在相互迴避測試中,10 架無人機進入到一個 3 米的圓圈範圍內。在抵達目標後,無人機會被隨機分配圓圈內的其他目標,如此往復。
實驗過程中,除了原先的樹木和三腳架外,實驗人員會模擬真實場景,逐漸放置各種障礙物模擬新建築,自己也會作為障礙物穿行於該區域,人為干擾和移動場上正在飛行的無人機。除此之外,還關閉了所有的地面定位錨點,以此模仿全局定位的損失。
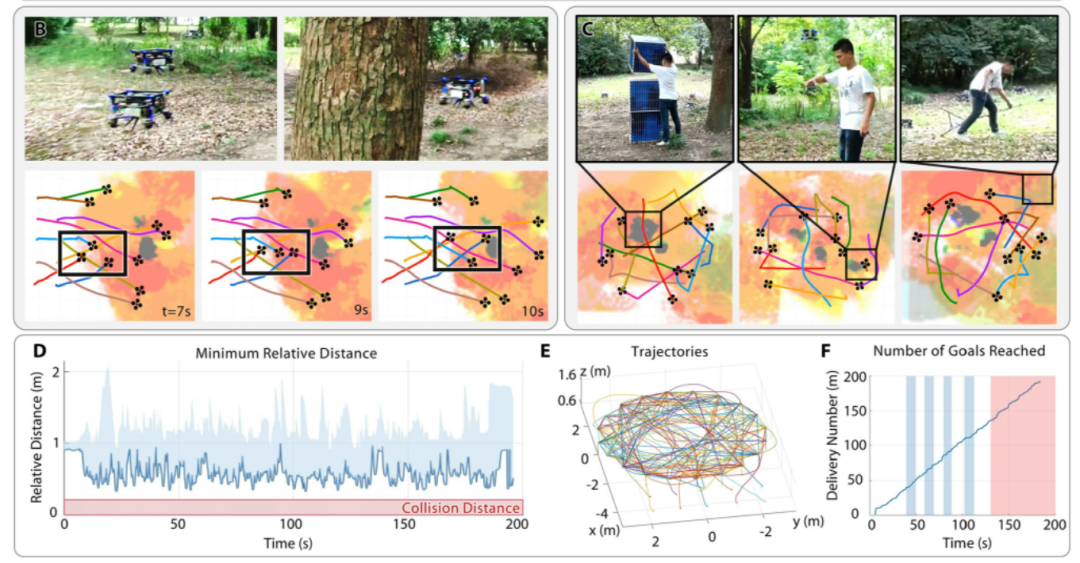
高密度場景下的相互迴避測試
實驗的結果是可喜的。無人機達到的總目標的數量隨着時間的流逝而線性增加,他們將這歸功於軌跡規劃達到的局部最優解。「在不同障礙物密度下實現了近乎恆定的傳輸速率。」
載人低空交通還未至,但無人機物流配送卻不遠。國內外,美團、順豐、亞馬遜、谷歌等一眾參與者都加入了無人機物流的行列,城市則是越來越重要的物流配送場景。
無人機在狹小空間裏方向隨機地飛行,並躲避障礙物及其他無人機,這一設置還原了摩天大樓林立的城市空間裏,空中交通密集繁榮的場景。這項測試的結果,則給了無人機系統能否實現「安全」、「高效」、「單獨導航」三項基本要求這個問題,一個積極、正面的答案。
飛躍竹林任務同樣如此。無人機羣能在雜亂的野外實現自主導航,人造環境中的導航能力也得到了側面的印證。而且,在更多複雜的場景中,如災難現場,也可能因為無人機的進入提高難時搜救能力。
在另一項多無人機跟蹤測試中,人類參與者在樹林中移動,四架無人機從前後左右四個方向對人類參與者進行追蹤。
無人機除了避開障礙物並趕上人類參與者外,還配備了額外的 RGB 攝像頭。這個攝像頭的重要任務當然不僅僅是拍攝視頻,它更是作為具有代表性的「高數據負載」硬件,完成視頻壓縮、數據存儲、對象檢測的任務,來驗證平台在高計算成本任務下的可擴展性。
這也意味着,更多的軟件和功能也可以被添加到無人機羣上。
周鑫團隊最後做了一件事,他們將系統內所有的代碼都公開在了文章的補充材料裏。他們也發佈了加速空中集羣研究所需的軟件和硬件,其他開發人員可以部署這些軟件和硬件,並在模擬和現場環境中驗證他們的算法。
這些被分享的數據資料被命名為「swarm 遊樂場」。遊樂場裏,更多更富挑戰性的任務正在被模擬驗證着。
參考文章:
https://www.science.org/doi/10.1126/scirobotics.abm5954
*頭圖來源:視覺中國
本文為極客公園原創文章,轉載請聯繫極客君微信 geekparkGO
極客一問
無人機智能集羣技術
還能運用到哪些場景?
