拜拜馬斯克,無人駕駛還得看中國企業_風聞
酷玩实验室-酷玩实验室官方账号-2022-07-23 07:06
特斯拉又撞了。這次受傷的人,是著名演員兼賽車手林志穎。
據台媒報道,今天上午10點50分,林志穎駕駛着Model X帶着兒子一起外出,但不料車子突然撞向了道路間的分隔島,特斯拉嚴重受損並瞬間燒出了一個火球。

報道中還提到,林志穎被好心路人拖出時,滿臉是血,手臂脱臼,甚至一度都沒辦法説話。
目前事故原因還有待查明。但所幸林志穎的兒子只是受到了驚嚇,並無大礙。
可這件事在網上已經炸開鍋了。因為過去特斯拉幾次事故的原因,大家可能還會覺得確實有可能是駕駛員操作不當,但林志穎作為專業賽車手,你很難去相信他開車會開不明白。

心平氣和地講,現在全世界之所以如此希望能夠實現無人駕駛,除了可以解放人力外,最重要的就是為了避免車禍、更加安全。相信大家已經聽到過很多次這樣的説法了,就是當無人駕駛實現後,94%由人為導致的交通事故將徹底結束,相當於每年幫助全球內135萬人避免橫屍街頭,避免被撞斷腿、撞斷胳膊、腦震盪的將不計其數。
但這些年來,我們已經聽過太多自動駕駛公司出來吹牛B了,把耳朵都給聽麻了。可距離無人駕駛第一次被提出都已經超過了80多年,到今天為止,我們還是買不到任何一輛上車輸個目的地就能睡大覺的私家車啊。
看了今天出的事情,很多人已經對特斯拉的輔助駕駛失望透頂了,心頭的熱血被一瓢涼水徹底潑滅,甚至有一些悲觀的網友開始預測,無人駕駛根本實現不了,這會成為本世紀最大的資本騙局。
因為我本人之前對無人駕駛也是非常期待的。為了搞明白這個問題,過去兩個月,我在網上查閲了大量講無人駕駛原理的資料和視頻,但後來發現還是似懂非懂,於是我又跑去幾個車廠實地調研了一番,並請教了幾位活躍在自動駕駛一線搞研發的博士。
這篇文章就來跟大家分享下我的看法。文章大約會被分成三個部分:
第一部分講無人駕駛上路測試的最新情況,包括國內、國外最新的測試視頻和數據。
第二部分解釋這麼多年下來,L5級別的無人駕駛始終沒實現的原因是什麼,到底是不是騙局?
第三部分會講在無人駕駛的歷史大潮中,中國接下來有哪些機會,普通人找工作、創業又能接觸到哪些機會?
01
好的,廢話不多説,我們直接開始。
不知道大家發現沒有,現在很多搞自動駕駛的公司,動輒一口氣能從口袋裏掏出幾十張、上百張自動駕駛的測試牌照來證明自己技術牛B,有的公司甚至能掏出400多張,但在各種牌照中,國內外到底哪張才是最有含金量的呢?
先拋結論:國外公認的權威是美國加州機動車輛管理局(DMV)頒發的全無人駕駛測試牌照,而國內從考試難度來看,最難拿的是北京T4路測牌照。

通過這兩張牌照的考核內容,我們可以管中窺豹,瞭解當下自動駕駛落地的技術巔峯大約在哪裏。
先來看國外,如何才能拿到一張加州DMV頒發的全無人駕駛測試牌照呢?
首先,光申請就需要先滿足8個條件,重點幾條是:
無人車在沒有安全員的情況下,也能按照L4/L5級自動駕駛標準行駛;在有監管的情況下,車輛已在相關區域進行過測試;繳納500萬美元的保證金或者等價保險證明;向當地政府告知完整測試計劃;訓練遠程安全員等。
具備申請條件只是一個開始,如初審符合加州DMV要求,加州車管局隨即會對申請企業展開12項有關自動駕駛核心技術的答辯與多次實地考察,整個評估審核時間,可長達一年之久。
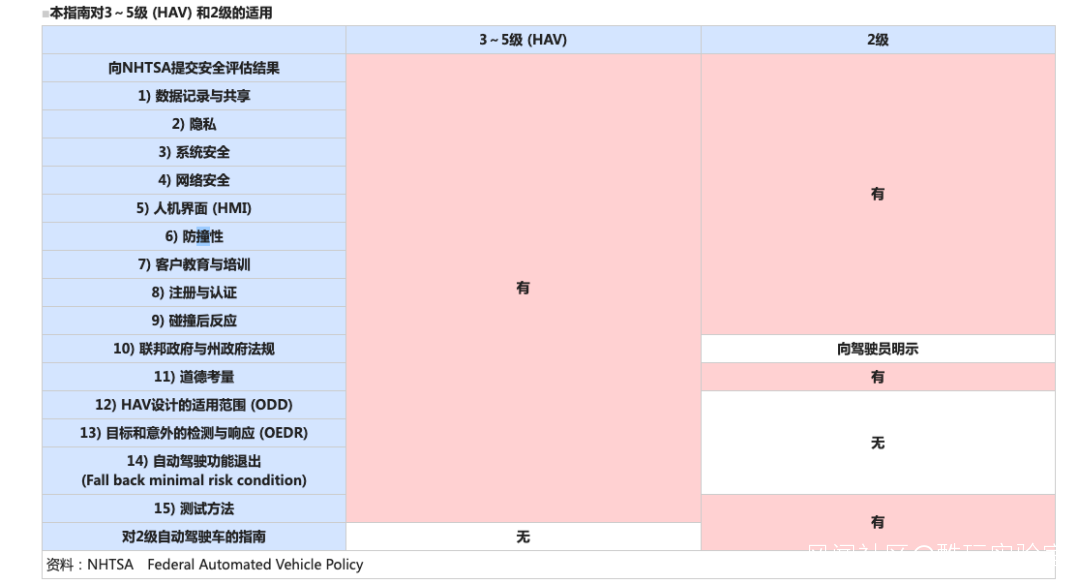
表格中的技術名詞看完是不是有點懵?簡單點來説,拿到這張牌照就意味着你公司的自動駕駛系統,不僅能在運營域內完全達到L4/L5級自動駕駛的標準,**而且還要具備包括處理修路、封路、警車叫停、消防車通行等長尾問題。**請注意是“運營域”內,這點很重要,本質上也是達不到拿到牌照後,到世界各地都能實現L4/L5的。
也正是因為考核非常嚴格,出了車禍牌照還要被吊銷,所以迄今為止全球只剩7家公司還有這張牌照,包括第一個拿到牌照的大名鼎鼎的谷歌子公司Waymo、百度Apollo、AutoX、Cruise、Nuro、文遠知行和Zoox。
值得一提的是,這7張牌照中,百度Apollo、AutoX和文遠知行3家都是中國公司。
那麼,這7家公司2021年在加州的全無人駕駛測試的數據情況如何呢?
非常遺憾,沒有人能知道完整數據,這屬於各家公司的商業機密,加州公佈也需要經過車企允許。以Waymo為例,今年2月加州DMV發佈的《2021年自動駕駛路測報告》中,顯示Waymo共有測試車輛693輛,但具體有多少輛是車內無人的,並不公開。有幾家倒是公開了,但因為測試車輛只有幾輛,里程數也不長,完全沒有説服力。
那如何才能知道美國現階段無人駕駛的真實實力呢?
説實話還真不難,原因就是今年5月,Waymo獲准拿掉了位於美國鳳凰城市中心的自動駕駛出租車內的安全員。也就是説,現在你可以在當地打到車內完全沒有人的網約車了。實際上,早在2020年10月,Waymo就試運營拿掉了部分位於鳳凰城郊區的車內安全員。
Waymo作為起步最早的老大哥,技術領先在業內是被公認的,它的車子在開放路段的真實表現如何?
今年1月,一對情侶在鳳凰城乘坐Waymo去13.5公里外的地方買咖啡,全程記錄了Waymo的表現。我看完了完整視頻,簡單給大家描述一下。

當Waymo根據導航來到出發點後,乘車人只需要在APP內點擊開門,Waymo就會自動把門打開。到後排坐好,確認出發後,Waymo不僅能自己找到出停車場的路,路上遇到加塞會平緩減速,旁邊車道並車過來也能準確識別並進行減速。

在一次與其它車子正面相遇時,它準確地判斷了對面車子的動向,毫不猶豫地完成了轉向。並且,坐在後排的乘客,還可以全程通過一塊屏幕實時看到車子周圍的情況。
這段視頻中,Waymo沒有遇到特別複雜的路況,而在另一位國外網友拍攝的測試視頻中,Waymo面對的則是在一個交通狀況非常複雜的十字路口進行左轉。要知道,複雜十字路口左轉對人類駕駛來説也是不小的挑戰,結果顯示Waymo在恰當的時機果斷地進行了左轉,表現相當出色。

除了Waymo之外,另一個能代表美國當下無人駕駛能力的就是特斯拉了。很多人可能會説,這不扯嗎,特斯拉不行啊,它就是個L2的輔助駕駛,還隔三差五出事故,各種排行榜上跟Waymo的排名沒法比。
特斯拉是確實沒少出事故。**但它目前已經向北美超10萬車主推送了特斯拉的“全自動駕駛”的測試版了,即FSD.beta。**根據馬斯克的説法,到今年年底,會給100萬特斯拉車主推送FSD.beta。
油管上同樣有不少人測試了特斯拉FSD.beta的表現。比如,6月12號,一位博主就分享了一段從韓國超市開回家,全程無接管,一鏡到底的30分鐘視頻。

視頻中,走純視覺路線的特斯拉,能夠從傍晚開到晚上,路上碰到施工可以準確繞行,能識別出自行車和行人,還能處理非常複雜的路況。**在一個十字路口時,它面對對面的白車要左轉,灰車要右轉,同時還有一對行人牽着狗在過紅綠燈,**特斯拉不僅準確應付了複雜路況,也讀懂了信號燈,知道自己什麼時候該走。

還有在一處是對面一個行人直走到一半,突然臨時轉向橫穿馬路,特斯拉也及時進行了剎車。
當然了,特斯拉FSD.beta並不是在每次測試中都能達到這種水準。比如有位博主發的視頻就顯示,一輛特斯拉在過一個十字路口時,地圖明明顯示是直走,它卻突然來了個右拐。雖然右拐當時確實沒有危險,但這種莫名其妙的決策,肯定無法讓人放心。
國外有網友在同一條路線上讓Waymo和特斯拉來了次大對決,結果顯示特斯拉到達目的地的速度更快,但乘坐體驗上Waymo更像是人在開,不會有太多的急剎和突然變道等。
不知道大家看完美國無人駕駛的實戰表現是怎麼想的,我反正覺得好像在落地方面確實領先中國還挺多的。
再來看看國內的情況吧,先來介紹下北京的T4路測駕照。形象點來説,通過了T4,就意味着幾乎能在京津冀地區的85%以上的城市交通通行場景中實現無人駕駛了。
具體來説,T4技術要求能夠通過隧道、學校等區域,可以應對行人違章通行、施工路段繞行等複雜場景,還要能準確識別多種交通要素如潮汐車道、可變導向車道、路口左轉待轉、臨時紅綠燈等特殊交通標誌、標線和信號燈,並可以正確實現無障礙通行。
**在考試中,車輛需要100%通過103項場景的覆蓋度測試,不允許有一點差錯。**還要具備超車能力、坡路行駛能力、坡道停車能力和起步能力,誤差要嚴格小於15cm。
不僅如此,在停車入庫和側方停車等泊車能力上也需要進行考核,車輛需要應對車庫內行人和障礙物識別等細節場景。
即使你順利通過 ,獲得了牌照的車輛也只有三個月的期限,牌照期滿後還需要再次進行季度考試。
難度如此之大,在T4駕照之上的也就只有北京T5駕照了,T5駕照對應的就是L5級自動駕駛了,也就是在任何條件下都可以實現無人駕駛。大家可以留意看新聞,目前國內還沒有任何一家公司拿到T5駕照,如果哪天有新聞報道哪家公司拿到了,那麼無人駕駛的時代也就到來了。現在T4駕照,國內也只有一家公司拿到了,就是百度Apollo。

今年7月,北京開放了國內首個無人化出行服務商業化試點,同樣由百度Apollo獲得了,百度首批25輛無人化自動駕駛車已經開在了北京亦莊的路上。也就是説,現在你也能在北京亦莊打到方向盤後無人的車了。

但政策上,説實話差距依然很大。
我們允許真正撤掉安全員的無人駕駛出租車上路,不僅比國外晚了將近兩年,從開放程度上,百度Apollo也僅是被允許在亦莊高級自動駕駛示範區60平方公里內進行,而Waymo現在已經在美國鳳凰城的市中心亂跑了。
比較下來,國內無論是在上路測試的開放程度,還是在具體的落地應用中,都要落後於美國。這是因為中國各大公司的自動駕駛技術跟美國公司比差距太大嗎?
每個人都在説電動車是中國彎道超車的好機會,可假如電動車的自動駕駛遠落後於美國,那不就嗝屁了嗎?難道説這次我們又要輸了?
02
要搞清楚這個問題,首先得先了解無人駕駛的本質是什麼。
無人駕駛,本質上是讓機器來學習人類開車的方式,是一種人工智能,就像讓阿爾法狗來學習人類下圍棋一樣。
從下圖中能看出,人類駕駛基本可分為三個步驟:眼睛來感知,大腦做決策,手、腳去執行。無人駕駛類比了這個過程,感知部分用的是攝像頭、雷達,決策是電腦,執行則是油門、制動等。
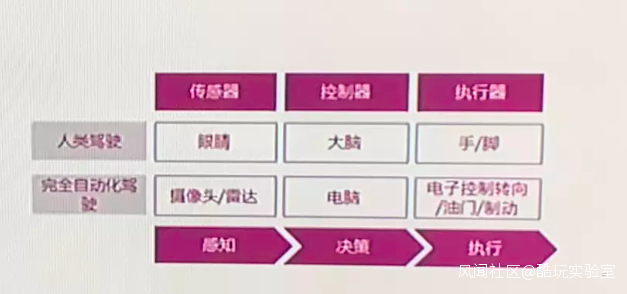
根據感知硬件的不同,又可以把無人駕駛分為兩條基本路線:一條是以特斯拉為代表的純視覺路線,即只用攝像頭;另一條是以國外Waymo、國內百度Apollo為代表的雷達+攝像頭路線。
**但不管是哪條路線,都是基於人工智能算法尤其是“深度學習算法”成熟後,才大跨步發展的。**這個很好理解,組成自動駕駛汽車的硬件,激光雷達、攝像頭這些東西早就有了,但為啥近10年才熱火朝天地幹起來呢?
有人説是過去像激光雷達這些東西太貴了,但這並不是理由,只要進入了大規模化量產,這幾年大家肉眼可見這些硬件成本下降的有多快。真正原因還是被深度學習算法補齊了最後一塊軟件上的短板。
但是,L5現在遲遲無法商用落地,也是因為目前深度學習有侷限性。
深度學習是基於特徵的歸納分類,該如何理解它呢?比如説你想讓AI通過深度學習認出貓這種動物,那就去找幾萬張甚至幾十萬張貓的圖片,讓AI來學習,AI會分別提取每隻貓在不同光線、背景下的眼睛、耳朵、鼻子、身材、花色等等部位的特徵,在歸納分類完成後,以後你再給它看一張新的貓的圖片時,它就會把這隻貓的特徵跟自己過去的分類結果做比對,對上了的話就會告訴你這是隻貓。
但在實際應用中,會遇到一些問題,**比如説碰到一些它之前從沒見過的在特殊光線下的貓或者是有的貓發生了基因突變,導致一些特徵和分類結果比對不上,這時就會出現認錯的情況。**我身邊就有同事用iPhone查看自己兒子照片分類的時候,看到了裏面被混進了一張兔子的照片。
這也是現階段人工智能和人類的本質區別,算法決定了現階段AI並不具備推理能力,並不能像人一樣在任何光線下或者貓發生基因突變後,依靠推理認出那仍是一隻貓。

我們知道現階段AI識別圖片已經被大規模商用了,但這是因為應用場景中偶爾出現錯誤是可以被接受的,把一張兔子照片混進我同事兒子的相片集中,並不會產生嚴重的後果,但用在車上關係到人的安全時識別錯了,就完全是兩碼事兒了。
也正是基於此,有些業界大佬認為實現L5級別無人駕駛需要AI理論完成新的突破,即實現“通用人工智能”才行。
**所謂的“通用人工智能”,要求非常高,可以簡單理解為“能夠完成人類可以完成的任何相關任務的人工智能”。**但迄今為止,通用人工智能仍被認為是非常遙遠的未來技術。
持這種觀點的專家,認為實現L5是痴人説夢,比如前華為智能駕駛總裁蘇菁在出席2021年世界人工智能大會時,就直接表示L5級的自動駕駛這輩子可能是看不到了。
“從現在開始計算,在一百年之內機器的智商是不可能超越人類的,而L5(完全自動駕駛)作為目前自動駕駛的最高級別,將是一個燈塔,這輩子估計看不到了。”蘇菁説道。
Waymo前CEO約翰·克拉夫西克也説過,L5級自動駕駛就像一個神話,這種技術可能永遠無法實現。
看到這裏,很多同學可能已經絕望了,原來完全自動駕駛就是一個美好的願望,壓根實現不了啊?
但我要説的是,大家先不要急着失望,什麼是L5級別? L5是完全超越了人啊,它意味着你可以駕駛任何車輛、在任何天氣條件下、前往任何一個地方,只需要按下開始鍵就行了,但實際上這是人類駕駛也達不到的。
問題的關鍵是,能不能出現一輛幾乎能達到人一樣水平的車來載我呢?就是説我完全能接受它偶爾不如我,需要我來接手,比如這輛車大約一年會有一兩次碰到沒見過的情景出現“發呆”但並不危險的情況,需要我幫它開過去,那我可以接受。我覺得就算一年出現10次,也應該會有大把的人願意接受,因為這相當於一年只需要我動手開10次車,其它時候坐在車裏看電影玩手機就行了啊。
這種水平的自動駕駛到底能不能實現呢?
上面我們提到過,現在AI應用在車上是有可能認不出或者認錯一些東西的,但大家有沒有思考過一個問題?
我的車本質是要開往目的地啊,就算我路上碰見了不認識、認不清的東西,那我也沒必要認識它,我就直接在決策時選擇繞開它不就完了嗎?
事實上當然可以這樣,不僅可以,應該也已經應用在某些特殊場景了。利用當下的雷達、攝像頭等技術,完全可以做到識別所有的障礙物,坐在這輛車裏,你大可以像好萊塢大片裏一個被追殺的人一樣閃轉騰挪,避開各種障礙物一路往前開。
當然了,如果路況特別複雜,同時出現多個障礙物避無可避時,並不能保證百分比百不撞,但絕對可以通過代價函數讓你撞的最合理。比如當被左右夾擊,前面只有兩條車道,一條有輛大卡車,另一條有輛扔在那不動的自行車,那我可以通過代價函數快速計算,去撞自行車逃跑就完了嘛。
正常人類的反應時間在300ms,自動駕駛車輛想要做到安全可靠,其反應時間必須短於100ms。理論上只要我算力足夠強,我就可以迅速決策,避開所有障礙物或者撞最合理的。
但是,如果按照這個思路來設計自動駕駛系統的話,現階段車子上路會面臨一個問題,就是會出現很多非常滑稽的場面。比如説當一個人在開車時,他看到前面有個小朋友吃完方便麪把袋子隨手一扔,人類司機會判斷這個袋子不會對我的車造成什麼傷害,我可以直接開過去,但視覺或雷達卻會把它識別為障礙物,並根據汽車周圍情況,進行停車或者繞行的躲避操作。
同樣的滑稽的場面還有,如果有人在馬路旁邊吹泡泡飄過來了,車子要不要躲?沙塵暴刮來了一隻襪子,車要不要躲?如果説都要躲,那馬路上只有你自己開車還好,假如你恰好停在一個十字路口等紅燈,這時候變綠燈的同時前方飄來了一隻破襪子,你的車就停在這等了2分鐘襪子被吹走,後面車的司機會怎麼想?會不會覺得你是個神經病?把喇叭按到炸?
其實上面提到的那個在鳳凰城打Waymo去買咖啡的視頻結尾,就出現過一個滑稽場面,在車子快要到達目的地的時候,道路前方出現了一處施工需要繞行,但Waymo沒有識別出來,最後非常保守地選擇右轉把倆人送進了一個停車場。

無人駕駛到來,一定是要提高效率的,假如效率變低了,那就毫無意義了。如何才能解決類似這種車子“發呆”的問題呢?
**根本沒有任何捷徑可走,只能依靠大量的數據來學習。**整個學習過程可以用這樣一張函數圖來解釋:
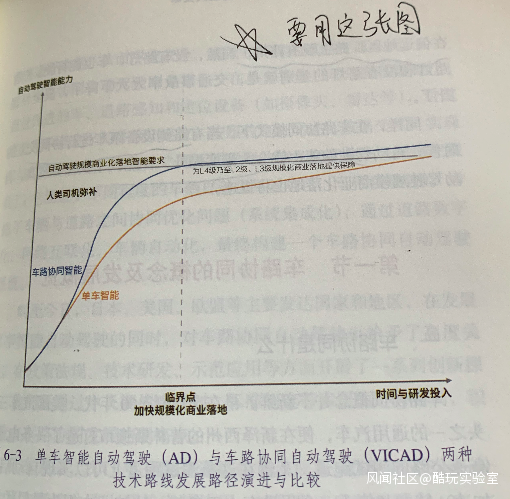
只需要看頂部直線和圖中黃色那條曲線
最上面的那條橫線代表了可以商業化落地的理想駕駛水平,曲線代表了車子隨着學習不斷提高的自動駕駛能力,當車子幾乎學習了所有路上會面臨的場景,到達某一個臨界點時,它就會開始慢慢逼近並達到這個標準。
根據美國蘭德智庫的研究,如果想讓自動駕駛幾乎達到人類駕駛的水平,**至少需要大約累計177億公里的駕駛數據來完善算法。**但商業化落地並不需要完全達到人類駕駛水平,就像我上面説的,人們是完全可以接受車子一年發幾次呆的,這個過程會快很多。
**所以,數據就是人工智能時代的燃燒“石油”啊!**誰掌握了最多的數據,誰理論上就能在自動駕駛研發上佔有絕對的優勢。
那麼,現在誰最具有數據優勢呢?
**非常遺憾 ,就是特斯拉。截至今年7月18日,特斯拉已經累計在全球賣出300萬輛車了。**特斯拉收集數據的方式被稱作“影子模式”,它在每輛車上安裝了傳感器,會蒐集每位用户的駕駛場景相關數據並傳回,幫助特斯拉進行算法訓練。
相當於你既花錢買了它的車,還要為它提供各種駕駛場景豐富的數據,大大攤薄了它的研發成本。而像Waymo、百度這樣車是自己出錢造的,還要依賴政策允許可以開到哪裏去測,收集數據的成本是很高的。
看到這裏,一些朋友可能會恍然大悟:那我們得抓緊放開了啊,趕快像美國一樣,讓符合條件的無人駕駛車在市中心跑起來,再不讓這些公司收集數據優化算法,可就來不及了。
説實話,最開始我也是這麼想的。直到有天我把這個問題拋給一位在百度搞自動駕駛的博士,他問我,你去過美國嗎?我説沒去過,老哥説去了你就知道了,美國那交通狀況,除了紐約其它地方都算是郊區,鳳凰城市中心那地兒可能還不如咱們一些郊區堵。
太麻了,這又是美國相對我們的一個天然優勢,交通狀況太好了,可以允許一些車子“發呆”。
我根本不敢想象北京晚高峯的時候,如果有幾輛無人駕駛車趴在路上發呆,或者莫名其妙地給你隨便找個停車場停,會是怎樣辣眼睛的場面,恐怕得引起史詩級大堵車吧?

無人駕駛在中國由於複雜的交通狀況,是最難實現的,這在業界公認。
而中國自動駕駛公司起步本來就比西方晚,現在能允許它們測試收集數據的範圍又很小,這該怎麼辦呢?
難道中國壓根不適合自己搞無人駕駛,只能躺平認輸了嗎?
03
如果只能躺平認輸的話,那文章到這裏也就結束了。
事實上,中國有一套系統的完整解決方案。並且,這套方案可供想象的空間要遠比無人駕駛大得多。很多人可能已經聽説過它的名字了,是的,就是“車路協同”。
不知道你們有沒有注意到,在中國“十四五”現代綜合交通運輸體系發展規劃中,寫了這樣一句話:推動車聯網部署和應用,支持構建“車-路-交通管理”一體化協作單智能管理系統。
到底什麼是“車路協同”呢?
為了搞明白這套系統,我專程跑去百度和華為的車路協同基地參觀研究了一波。
形象點來説,車路協同主要包括三大部分:一是具備一定自動駕駛能力的“聰明車”,二是由攝像頭、雷達、通信設施等組成的“智慧路”,三是由計算平台和雲控平台組成的“強大雲”。

用我在鄭州華為測試基地的親身經歷,來給大家詳細介紹下這套系統是如何運作的吧。
首先是擺在道路旁邊的終端設備,在一根像紅綠燈一樣的杆子上,分別架着攝像頭、激光雷達和毫米波雷達,下面的設備箱裏有的放了通信設備,有的放了邊緣計算服務器。
我坐在車裏,當前面出現一個行人“鬼探頭”的時候,車內中控大屏上馬上標出了提醒。
這個過程是怎麼實現的呢?
首先是架在路邊的各種攝像頭和雷達先感知到了這個信息,然後經過邊緣計算服務器處理後,認定是緊急事件,於是通過通信設備直接下發給了我坐的車。當然了,它其實感知到的不僅有鬼探頭那個行人,還有旁邊的停車、路況等信息,只不過因為這些信息我的車子也能感知到,也沒有那麼緊急,所以就不會下發。
但所有這些信息都會被上傳到雲端,以及車子本身感知到的信息也會被上傳到雲端,讓中心雲來統籌做信息融合,繪製出一張整體交通態勢圖。
這張密密麻麻的圖是在實時動態變化的,大概長這個樣子。

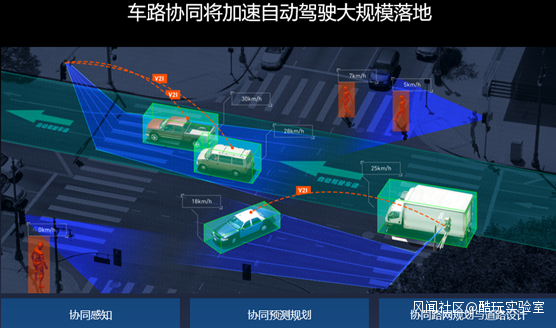
如果説單車智能最大的想象,無非就是解放了人力,能讓車子像老司機那樣為你服務的話,那車路協同的格局就徹底打開了,它比老司機要靠譜得多,甚至可以解決掉一些人類駕駛根本處理不了的難題。
就比如上面提到的行人“鬼探頭”,以及路口有車輛突然竄出等,這種情況過去高度依賴司機視線是否被遮擋,根本沒法提前做出預測。但車路協同後就完全不一樣了,你的車子可能在百米之外,就收到了“智慧的路”發來的高能預警。
另外像高速上的連環撞,這在當下也幾乎是個無解的難題。因為高速上的車速實在太快了,等眼睛能看到的時候再剎車,經常就來不及了,但引入車路協同後,就可以在更遠的距離收到車禍提醒,及早進行剎車。
除此之外,車路協同還能幫助構建“智能交通”,讓每一條路都可以根據車流實時吞吐量,動態調整自己紅綠燈的時長,大大提高交通效率。
根據百度的測算,以車路協同為基礎的智能交通,將能夠提升15%-30%的通行效率,5年之內,中國的一線城市將不再需要“限購”、“限行”;10年之內,靠交通效率的提升,基本上擁堵問題就可以解決了。
當然了,車路協同也並不是一蹴而就的,它有點像特斯拉層層迭進的路線,也會經歷大約三個發展階段。簡單來總結一下:
第一階段,是隻支持輔助駕駛安全、提高交通效率,主要應用在智能公交和智能高速上。這一階段只需要常規4G網絡支持。
第二階段,是在封閉園區和封閉道路中商用車的中低速自動駕駛。這一階段需要局部5G網絡支持。
第三階段,可以理解為全面成熟的車路協同系統。這一階段既需要5G網絡支持,還需要針對5G的車用無線通信技術NR-V2X的支持。
是不是有點看不太懂?沒關係,大家只需要留意聽這樣一個新聞:假如哪天有個叫 3GPP 的國際組織宣佈側重於萬物互聯的 5G R17 標準正式落地,那就意味着車路協同也要落地成熟了。
再來解釋下車路協同對中國實現無人駕駛的幫助吧。
前面我們説過,制約中國自動駕駛公司算法進步的最大一點,就是我們的路太複雜,不允許無人駕駛車到處開收集數據。但車路協同就意味着你每條道路上都有攝像頭、雷達了,可以一刻不停地採集交通數據。
像特斯拉那300萬輛車採集到的數據量,與這個數據相比,簡直就不在一個數量級上了。與此同時,車路協同融合後還會形成更高維度的數據。比如,在空間維度上,範圍和視角就會變得更加豐富。
車路協同從路端着手,幫助自動駕駛一起來解決最後10%的長尾問題,這將使得單車智能大大加快****實現無人駕駛的進程。
不僅如此,在車路協同第三階段,因為道路旁邊會建有大量的邊緣計算服務器,以及還有強大的中心雲,原則上只要通信設備足夠可靠,就可以把大量的計算丟給這些服務器了,車子等着收到運算結果做決策就可以了,這將大大減輕對私家車的算力要求。
對每一個人來説,這都是一件實實在在的好事,因為這意味着你可以不用花那麼多錢,哪怕買一輛芯片算力沒那麼強的車,也可以享受到無人駕駛了,這就是科技平權啊。
寫到這裏讓我們先暫停一下,再來複盤一遍特斯拉和Waymo的核心競爭力到底是什麼,其實不管是特斯拉還是Waymo,背後的核心競爭力都是人工智能算法和決策芯片,中國複雜的交通導致車企沒有那麼多數據來訓練算法,落後就不足為奇了;同時芯片上的差距,大家也都懂,這屬於上個時代的遺留問題。
但大家發現了沒有,在車路協同中最關鍵的兩項技術:5G和雲計算,正是我們的強項啊。
5G中國的領先顯而易見。截至 2021 年 7 月,中國已建成 5G 基站 91.6 萬個,佔全球總量的70%,5G連接設備數超過3.65億個,**佔全球總量的80%。**車用無線通信網絡LTE-V2X等實現了區域覆蓋,新一代車用無線通信網絡5G-V2X也在部分城市、高速公路逐步開展應用了。
雲計算中國也在全球名列前茅,相關數據顯示,2021年全球雲計算排名前10的公司中,有5家都是中國公司,妥妥地佔據了半壁江山。
所以,不論從中國複雜交通狀況的基本國情出發,還是從我們的技術儲備、未來不會被西方卡脖子的角度出發,車路協同都是更適合我們的選擇。
尾聲
總結下來,站在一個消費者角度,接下來大家大概率會經歷這樣三件事:
一是你買的電動車隨着不斷學習新數據,不停地解決掉那些長尾問題,接下來肯定會越來越智能,人開車會變得越來越輕鬆了。
二是一定會有更多地方,將能夠打到無人駕駛的車。在剛剛過去的百度世界大會上,百度剛發佈了一輛沒有配備方向盤的無人車,這與它剛在北京獲准拿掉安全員進行自動駕駛出行服務遙相呼應,相信隨着政策放鬆,接下來國內肯定會有更多城市能夠打到百度的無人駕駛車。

我看了下這輛車的成本,已經下探到了25萬一輛,基本也就是輛普通新能源車的錢。這樣的車一旦投入到網約車運營,據報道**打車費只需要現在市場價格的一半。**李彥宏在大會上説,將在全國佈局上萬輛這種車上路。
三是假如你所在的城市,未來引入了車路協同的運營商,你開的恰好也是電車,那將會大大減少你每天上下班的通勤時間,並減少你可能遭遇的車禍等情況。
當然了,在實現無人駕駛的道路上,也會面臨一些問題。
就比如説軟硬件的可靠度問題。假如林志穎作為專業賽車手今天沒有出現操作不當的話,我相信再換一輛特斯拉開到林志穎事故的同一路段上,它應該是能感知到那個非常明顯的道路分割島的。那麼,林志穎今天開這輛特斯拉到底是軟硬件哪裏出了問題呢?**如果出問題的話,它設計的安全冗餘為什麼沒發揮作用?**這是產品上出了很大問題啊。

另外一個值得思考的問題是,其實現在在一些礦上、港口、幹線物流、園區等固定路線的固定場景中,已經落地了無人駕駛,礦場、物流等也確實節省了成本,但同時也造成了很多司機的失業。
中國有3000萬貨車司機,同時也有大量靠開出租車、網約車賺錢養家的人,如何在發展的過程中,保證有新的工作崗位完成對這些基礎勞動崗位的替代,讓這些人有工作、有錢賺,是需要被認真對待的。
雖然歷史的進步不以個人意志力為轉移,但如何保證科技進步的同時讓更少的人付出代價,是擺在每一位決策者面前的阿克琉斯之踵。