想實現飛檐走壁?你得有我這雙腳_風聞
科普中国-科普中国官方账号-中国科协科普工作官方微平台2022-10-12 16:41
每個少年都會有這樣一個武俠夢——手持青鋒,頭戴斗笠,飛檐走壁,行俠仗義!而我們的現實生活中,還真有這麼一位“大俠”,輕功過人,分分鐘就能實現“上牆自由”。
它就是我們今天的主角——壁虎。
01
壁虎漫步有妙招
豎直面、天花板、岩石縫隙中,大壁虎(Gekko gecko)都能運動自如,真可以説是全空間運動的小能手。這主要因為大壁虎的腳掌具有黏附能力,大壁虎是一類體重相對較大的大體型黏附動物。

大壁虎在養殖環境中的照片
科學家對其黏附機理的研究已經較為成熟,壁虎的運動黏附器官是一種典型的多層級、分佈式系統——每個腳掌上有五個獨立分佈的腳趾,每個腳趾上分佈着 10-15 個弧形皮瓣,皮瓣上覆蓋着數百萬根微納米尺度的剛毛。腳掌的黏附力主要源於其底部微小剛毛與基底表面所產生的分子間作用力,這些剛毛直徑大約 5μm,僅為人類頭髮直徑的五十分之一,還真是連一根頭髮絲兒都不如!這種黏附力的產生依賴於多層級的黏附系統(包括腳掌-腳趾-皮瓣-剛毛)以及對這種黏附系統高效且精細的調控。
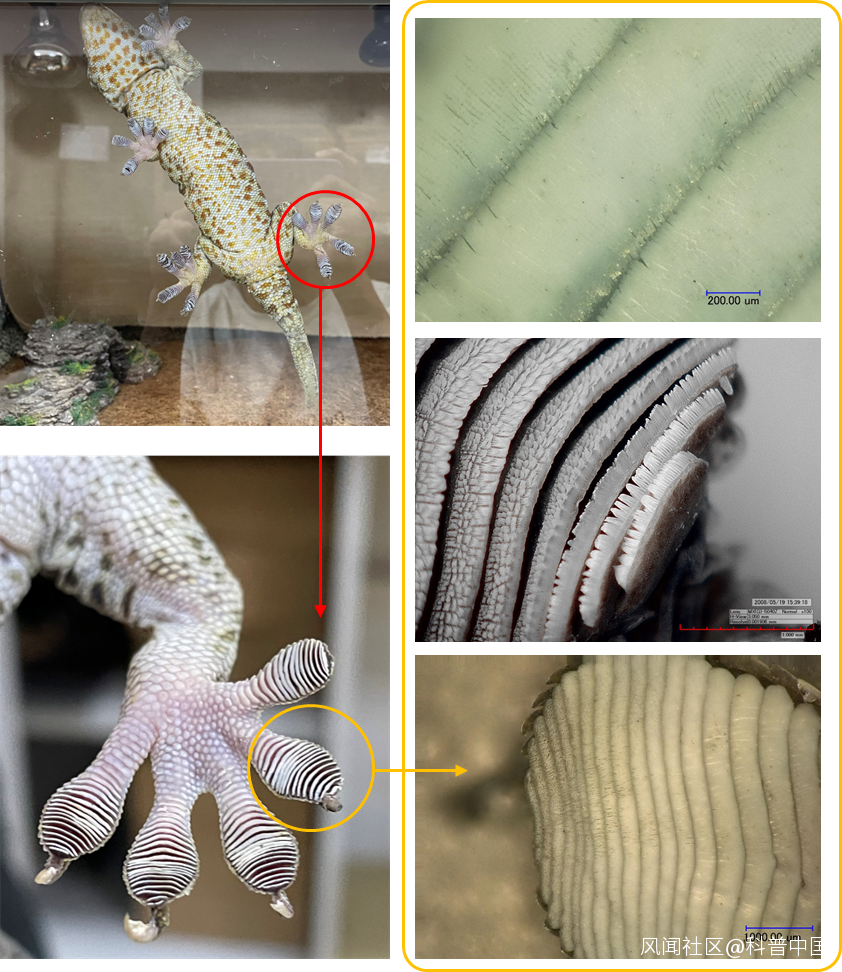
壁虎的多層級黏附器官
02
看壁虎如何實現“粘貼”自由
大壁虎是各種黏附物種中體重最大的,其對黏附能力的掌控不僅得益於分層級的黏附結構,還依賴於對黏附結構的高效精細調控。腳掌是大壁虎的黏附器官,具有剛柔耦合的結構特性。對腳掌黏-脱附週期中運動行為的研究是瞭解黏附運動廣泛適應性的基礎。腳掌的黏-脱附運動週期分為支撐和擺動相位,其中支撐階段主要分為接觸、黏附和釋放三個階段。
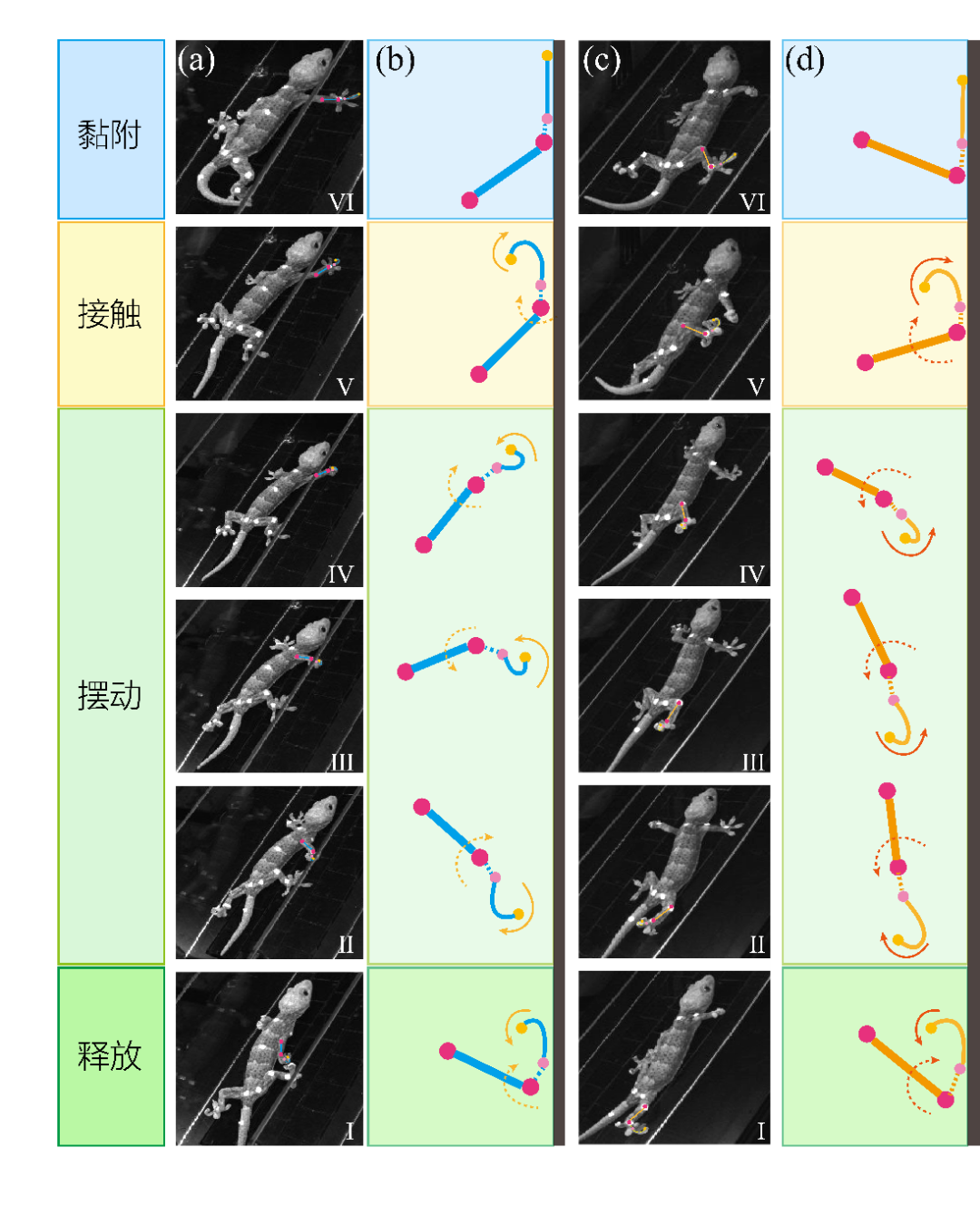
壁虎前後腳掌黏-脱附運動過程的不同階段
已有研究表明大壁虎腳掌在黏附階段時的運動姿態和佈局與黏附力有關(方向和大小),比如大壁虎通過改變五個腳趾的佈局來面對不同斜角的斜面以及重力加載方向,並通過改變支撐階段時腳趾的支撐姿態來應對不同形狀的基底。此外,壁虎可以****通過調整運動步態來適應不同環境的運動需求,比如在豎直面不同方向運動時腳掌黏附時間發生調整,在不同斜角基底上運動速度明顯改變,然而研究發現單個腳趾完成黏附的時間保持不變。
03
對着壁虎腳丫子偷拍的科學家
黏附運動中有關腳掌運動行為調控的研究還不夠完善,在黏-脱附運動的不同階段,腳掌的動作行為分別是怎樣的?各階段的動作行為會不會影響到腳掌黏附的效果?這些問題還不明確。
為了對腳掌黏-脱附週期中的運動行為進行系統化的研究,瞭解在不同運動環境下大壁虎腳掌的黏-脱附行為模式採取怎樣的適應性調控策略,科研人員對大壁虎在不同傾斜表面(水平面、45° 斜面和豎直面)和不同運動方向(向上和向下)上的黏-脱附運動行為進行了研究。可以説是“懟腳直拍”了。

研究人員在實驗室內對大壁虎做實驗
研究中搭建了一套針對具有大柔性器官小動物運動行為精準測量的運動捕捉系統,對大壁虎在攀爬運動過程中軀幹-肢體-腳掌等器官上的標記點進行精確捕捉。
由此,對大壁虎的運動行為進行記錄和量化處理,定義了一系列運動參量對腳掌運動進行定量表徵,分析並總結前後腳掌的黏-脱附運動的行為模式,比較前後腳掌黏-脱附運動模式的差異性和相似性,總結腳掌與肢體運動的協作關係。
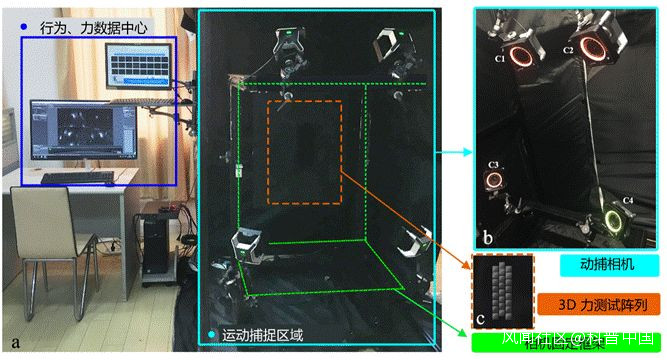
南京航空航天大學仿生所搭建的運動行為-反力同步精準測試系統
04
跟着我前腳、後腳一個慢動作
大壁虎前後腳掌的黏-脱附運動週期在不同環境下保持驚人的相似性,比如:在接觸階段的接觸時間百分比(前腳:7.42%;後腳7.44%)和彎曲角度(前腳 41°;後腳 51°)、前腳掌的運動範圍(偏航 163°;俯仰 309°)及後腳掌的俯仰範圍(164°)。
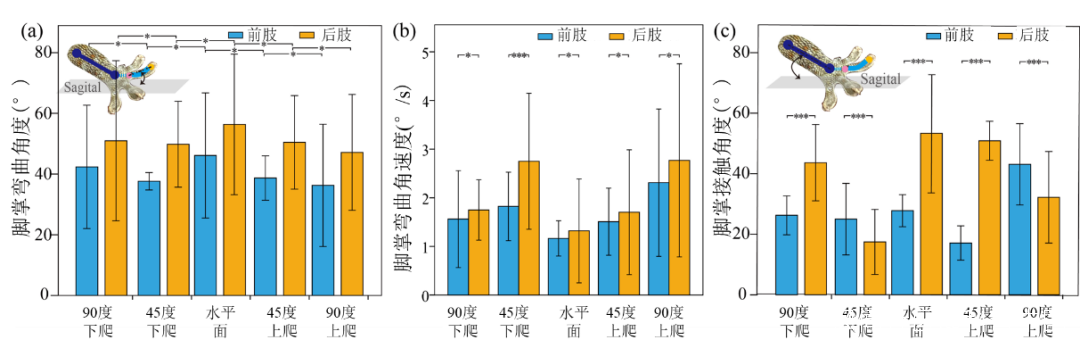
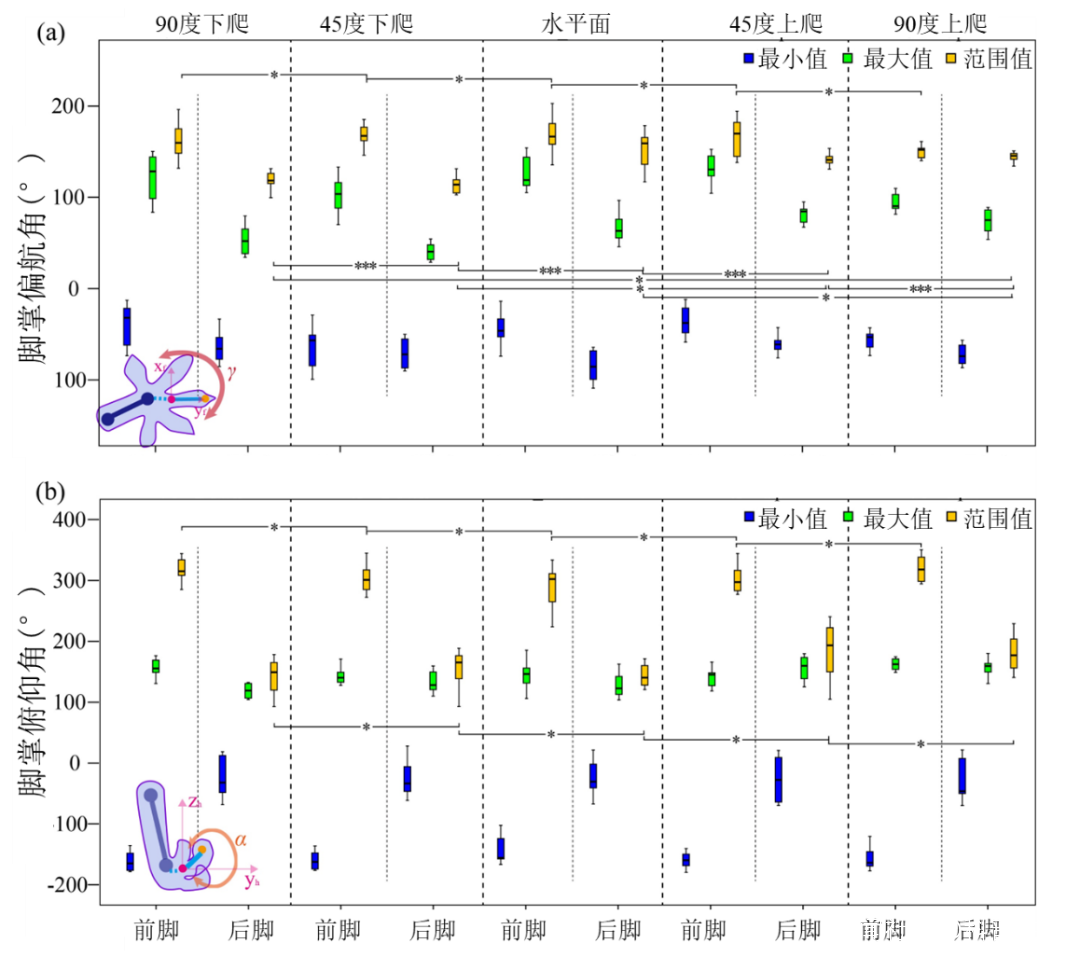
大壁虎在不同傾斜度基底上下攀爬運動中前後腳掌的運動角度
此外,黏附腳掌的運動姿態保持不變,主要表現為:前後腳掌運動角度(包括偏航和俯仰角)在單個黏-脱附週期中的變化趨勢保持一致,前後腳掌偏航角都具有先減小後增大的趨勢。
此外,前腳掌和後腳掌的運動姿態具有明顯差異:前腳掌俯仰角的變化趨勢與後腳掌相反,前腳掌俯仰角先減小後增大,而後腳先增大後減小;且前腳掌的運動角度範圍相比後腳掌更大,這種差異性這主要是由於前腳和後腳具有不同的解剖結構和功能需求。
研究結果展現了壁虎前後黏附腳掌在黏-脱附週期中的運動行為具有一致性,這體現出腳掌黏-脱附運動週期中存在的節律性,這種運動規律減少了黏附腳掌在應對不同環境時運動調控的複雜性。
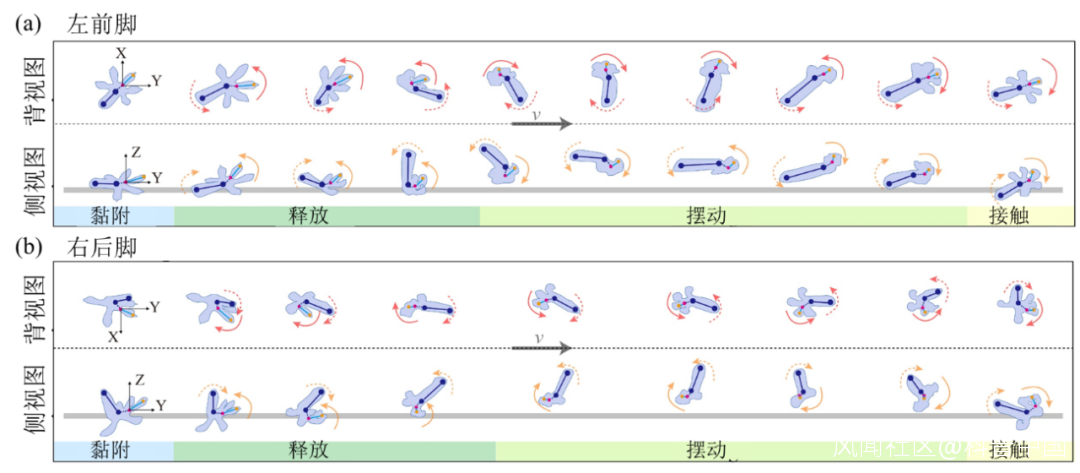
大壁虎在前後腳掌在黏-脱附運動週期不同階段的姿態展示
大壁虎的柔性黏附腳掌在不同環境下的黏-脱附運動週期具有相同的規律,包括腳掌在空中的擺動姿態以及在接觸基底時候的彎曲程度等,這主要是因為腳掌具有剛柔耦合的結構特性和特定的黏附功能需求。那麼面對環境的變化,大壁虎可通過調節具有多自由度的肢體的運動,配合腳掌的黏-脱附運動,實現在各種環境下快速、穩定的攀爬運動,成為飛檐走壁的高手。
“大俠壁虎”啓發我們,對於具有大柔性腳掌結構和高自由度肢體的仿生黏附機器人,腳掌的運動控制往往具有通用性,肢體則要根據環境的變化進行適應性調節。同樣地,我們是否還能從其他的神奇動物身上得到啓發,設計有趣又有用的發明呢?這可能就是科學的迷人之處。
文內所有圖片均來自南京航空航天大學機電學院仿生所運動力學組
參考文獻:
[1] Zong, W., Wang, Z., Wang, B., et al. Behaviours in Attachment-Detachment Cycles of Geckos in Response to Inclines and Locomotion Orientations. Asian Herpetological Research, 2022, 13(2): 125-136.
[2] Zong W, Wang Z, Xing Q, et al. The method of multi-camera layout in motion capture system for diverse small animals. Applied Sciences, 2018, 8(9): 1562.
[3] Wang Z, Zong W, Wang B, et al. The Marking Technology in Motion Capture for the Complex Locomotor Behavior of Flexible Small Animals (Gekko gecko). Asian Herpetological Research, 2019, 10(3): 197-210D.
[4] Song, Y., Dai, Z., Wang, Z., et al. Role of multiple, adjustable toes in distributed control shown by sideways wall-running in geckos. Proceedings of the Royal Society B, 2020, 287(1926): 20200123.
[5] 王周義, 顧文華, 吳強, 等. 牆面及天花板上大壁虎腳趾作用力測試和腳掌形態研究. 中國科學: 技術科學, 2011, 41(9): 1161-1166.
[6] Wang, Z. Y., Wang, J. T., Aihong, J. I., et al. Behavior and dynamics of gecko’s locomotion: The effects of moving directions on a vertical surface. Chinese Science Bulletin, 2011, 56(6): 573-583.
[7] Wang, Z., Xing, Q., Wang, W., et al. Contribution of friction and adhesion to the reliable attachment of a gecko to smooth inclines. Friction, 2018, 6(4): 407-419.
[8] Autumn K, Peattie A M. Mechanisms of adhesion in geckos. Integrative and comparative biology, 2002, 42(6): 1081-1090.
出品|科普中國
作者|宗衞佳、王周義 南京航空航天大學
審核|趙鶴凌《亞洲兩棲爬行動物研究》編審
策劃|毛萍 中國科學院成都生物研究所 館員
監製|中國科普博覽
選送單位:中國科學院計算機信息網絡中心
本文封面圖片來自版權圖庫
圖片內容不授權轉載
原創圖文轉載請後台回覆“轉載”