過去幾年,特斯拉拒絕雷達的理由,説到底還是因為它們降本增效的速度還不夠快_風聞
Lawrenceglow-七字符2022-10-13 21:15
【本文由“吃嘛嘛香”推薦,來自《新能源汽車能否接棒消費電子,成為半導體行業新的需求增長點?——峯瑞資本楊永成訪談(下)》評論區,標題為小編添加】
貓膩沒有,我找到了一個專業的文章給的答案:
過去幾年,特斯拉拒絕雷達的理由,説到底,還是因為它們降本增效的速度還不夠快。
故事的B面,則是特斯拉押下重注的純視覺路線技術突飛猛進,快到在不到三年的時間裏端了各種雷達的飯碗。
自2020年開始,特斯拉意識到依靠兩個二維生物交換信息,很難準確還原三維世界。
2020年當年,特斯拉推出FSD beta,全面倒向潛力更高的攝像頭,對智能駕駛算法進行重構:
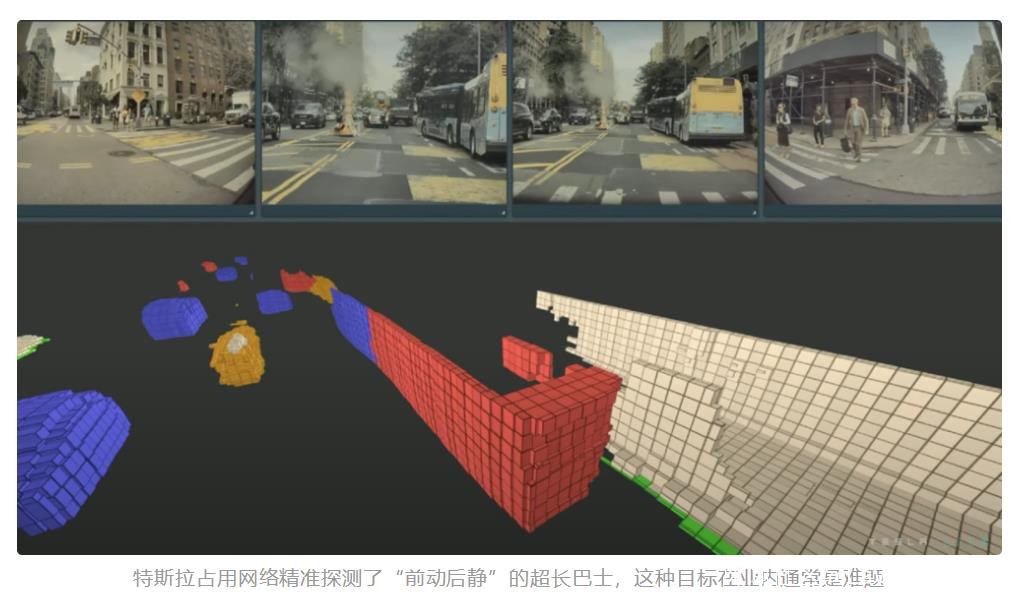
而在今年,特斯拉的純視覺算法更進一步,橫空出世的佔用網絡(Ocuppancy Network),讓攝像頭把對手瞄向了更強的存在——激光雷達。
基於純視覺的佔用網絡算法將感知空間劃分為一個個立體網格,通過檢測網格是否被佔用,以一種低算力開銷、低計算延遲的方式,實現對物體體積的測算
————包括讓全世界智能駕駛團隊頭疼的各類異形物體。這解決了視覺感知“物體未識別則不存在”的經典難題。
而在此之前,行業多認為昂貴激光雷達才是正確答案。
視覺算法擁有了對標激光雷達的能力後,羸弱的超聲波雷達在邏輯上也失去了存在的必要,順勢砍掉。
至此,在特斯拉體系內攝像頭與雷達的賽馬中,攝像頭通過算法的進化,完成了對雷達能力的模擬,以低成本實現了視覺雷達效果,一個頂仨。
~
馬斯克對毫米波雷達的態度也從未一棍子打死,今年初他在推特上互動時,留下了頗有暗示意味的回覆:“高精度(毫米波 )雷達才是正解。”
特斯拉對雷達的態度,也能反映出這家公司最真實的第一性原理——設立一個高難度的目標,然後找到最具性價比的工程手段實現它。
以上摘自@遠川汽車評論《偌大的特斯拉,容不下一顆小雷達?》
請各位關心技術細節的可以移步原文仔細閲讀。
原文鏈接:https://www.huxiu.com/article/683973.html