自動駕駛上路了,是真智能還是看上去智能_風聞
返朴-返朴官方账号-关注返朴(ID:fanpu2019),阅读更多!2022-10-20 11:06

想要與人類司機並駕齊驅,像真正的人一樣靈活應變、自主決策,自動駕駛還有一個Plan B可以選擇,那就是通用人工智能。
撰文 | 劉凱(渤海大學教育科學學院)、賈敏(渤海大學通用人工智能研究所)
人工智能具有專用和通用兩種不同取向,分別對應專用人工智能與通用人工智能。目前學術界與實業界中的“人工智能”一詞幾乎無例外地均屬專用人工智能,其目的在於通過預設的算法或訓練解決特定問題;通用人工智能則致力於研發元學習能力,藉助後天培育實現特定問題的成功解決。
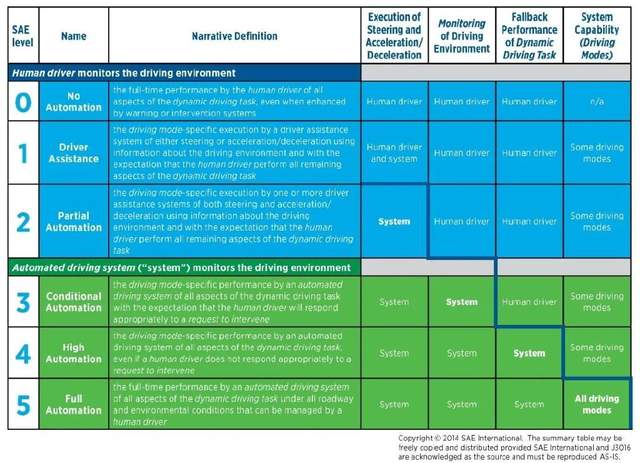
正如將“智能”視作“計算”一樣,自動駕駛在專用人工智能專家眼中似乎只是一個純粹的技術問題,並試圖通過模塊化的方式實現技術拓展。人可以做到不攜帶任何設備就自行出門,但自動駕駛汽車離開通訊網絡將寸步難行。縱使最新的高性能芯片和激光雷達傍身,自動駕駛汽車在稍微擁堵的路口駛出高速或插入轉彎隊列時依然經常判斷失誤。為解決此類問題,汽車製造商爭先恐後地提升汽車的智能水平,從L2-L3向L4-L5急行軍的消息經常見諸報端。與此同時,專門為協助自動駕駛車輛應對複雜路況的各式專用計算設備也應運而生,C-V2X蜂窩車聯網技術就是其中之一,具備交叉路口來車提醒、前方事故預警、盲區監測、道路突發危險情況提醒等功能,被視為智能駕駛和智慧交通落地的關鍵環節。

可以預見,自動駕駛車輛通過路口的成本將繼續上升,連稍有經驗的城市流浪狗都能做到的事情,如今卻要在所有路口都部署各式監控設備,使得本就複雜的城市道路管理雪上加霜。這僅限於市內,畢竟靠外界幫助才能獲取的“絕對安全”難以在郊外推廣。看起來更像是為了更加“智能”而精心設計的一出城市“秀”。
未來,專用人工智能技術路線下的L4-L5級自動駕駛,必然趨向“智能外包”的技術解決路線——依靠的不是更強的單車智能,而是更復雜、更精密的上層協調節點。這種做法存在諸多隱患,高級協調節點不僅具有十分有限的覆蓋性,並將迅速增加通行系統的邊際成本和總體複雜性,令單車決策鏈延長及決策參與度降低。其後果則是,智能路網本身的系統性脆弱將面臨隨時被放大的危險,這就是專用人工智能集權技術發展路線與生俱來的軟肋!
事實上,專用人工智能的自動駕駛從未真正面對“智能”問題,而是將單車智能(內部解)不斷轉嫁為尋求外部援助(外部解),即車輛自己更多負責提出問題而非解決問題。到最後,並不是汽車變得更具適應性,而是人為地改造了那些不適應的地方——汽車本身仍被封印在“有多少人工,就有多少智能”的魔咒之中。
通用人工智能則不同。它試圖創造能思考、有情感的具有認知功能的軟件系統,並認為智能並非全知全能,系統需要通過預設的元能力不斷學習才能到某個領域內的實用水平。而且,即使在達到這種水平之後,學習也不會停止,尤其是在環境變化的情況下更是如此。對通用人工智能而言,先天預置的是元水平的學習能力,但一切學習的內容都由後天習得。因此,通用人工智能系統的自動駕駛本質上是一個教育而非技術問題。
正如剛出生的人類嬰兒不會駕駛汽車一樣,通用人工智能系統啓動時也並未預置任何駕駛經驗,更不是為了駕駛汽車而設計。其實,自動駕駛對通用人工智能來説是一個偽問題。因為,與人類高度類似,通用人工智能系統成長的第一步也是通過自身的感知運動設備獲取具身的直接物理經驗。訓練一個機器人和訓練一輛汽車完成自動駕駛任務,對通用人工智能系統並無實質區別。究竟裝配步足、履帶還是輪子等“器官”,只是系統的“感覺”各異,卻並非“駕駛”有別。甚至,都未必非得裝配“腿腳”,用翅膀或推進器前進也同樣可以。乘客可以繼續坐在車裏,也可以把汽車造成機器人形狀而把乘客收容到“肚子裏”,甚至還能懷抱或者背馱。但凡能夠實現載人有目的性的自主移動,就是自動駕駛。因此,通用人工智能的自動駕駛不挑設備類型、不挑載運形式、不挑駕駛環境,通用人工智能的自動駕駛正是通用意義上的駕駛。
這種通用性一方面體現在外設選擇的多樣性,另一方面則體現在駕駛背後學習內容的廣博性和具身理解性。通用人工智能自動駕駛“算法”的全部奧義,就是從零開始“養育”一台通用人工智能的“機器嬰兒”。這台“機器嬰兒”具有主動性,其所有行動力全都依靠自身積累的歷史經驗,是一種向內依賴的平權技術模式,而非向外依賴的集權技術模式。於是,通用人工智能系統的“養育”過程,並不存在專用人工智能那種外在上帝視角的干涉,唯一的上帝視角恰是機器“嬰兒”自身的內在視角。而“養育”具體的技術手段,也不是專用人工智能的機器學習、圖象識別、優化求解等計算機及機器人相關的軟硬件技術,而是相較於人類嬰幼兒一樣的教育手段。這種特殊性與人們過去幾十年來對機器學習、人工智能的瞭解相悖,令其乍看上去似乎難以理解。在此,以感知運動為例進行比較説明:
首先,專用人工智能系統的處理內容無所不包,既可以是圖像、聲音之類的具象數據,也可以是自然語言、知識之類的抽象概念,但通用人工智能系統的教育能且只能從感知運動經驗做起。因為只有直接經驗才是絕對經驗,而只有絕對經驗才能在通用人工智能系統中直接落地。至於給通用人工智能系統預置“思想鋼印”的想法皆為秕言謬説,這些抽象經驗根本沒有立身之基,好比向人類嬰兒詢問“好人有好報”的看法一樣可笑。儘管理論上也許可以藉助某種神秘生物手段在嬰兒腦中搭建特定的神經構成,但實際上嬰兒對這種抽象觀念卻毫無一絲理解可言。所以,就連距離、速度、避障乃至數字等自動駕駛最初級的常識,通用人工智能的機器嬰兒一開始也並不知曉,亦如人類嬰兒一般。
其次,專用人工智能系統的學習和訓練階段中,感知與運動通常是分離的。圖像識別無須攝像頭像人眼一樣“跳視”,而機器人位移也只是程序設定的機械操作及其優化。然而,在通用人工智能系統“養育”過程中,感知和運動不可分,二者不是兩類不同事物,而是同一類事物的不同側面。運動是感知經驗變化的原因,感知則是運動結果的反饋,二者相互依存、缺一不可。更為重要的是,直接或間接經由運動,感知才能建構出主體內在的經驗意義。比如,對於一個僅裝配輪子和超聲波傳感器的通用人工智能小車而言,聲波數據本身是沒有意義的,其意義發生於運動因其變化之後;而單純的運動也沒有意義,運動的意義在於傳感器數值由其減少到零的過程之中。也就是説,感知運動信號是最直接且不可再分的原子經驗,原子經驗沒有原生意義,其意義來自內在的相互賦予。以視覺為例,通用人工智能的主動視覺與主流計算機視覺的基本原理和實現方式大相徑庭,儘管都是“看”,卻有不同的“見”。前者關注動機水平上自上而下面向可供性(Affordance)的意義建構,具有主觀性和可解釋性;後者則聚焦於像素水平自下而上的模式發現與匹配,本質是一個無腦的哲學殭屍。
此外,通用人工智能的自動駕駛也不僅僅只停留在造車的層面,它是我們的一面鏡子,能夠從中折射出更為深刻的人的道理而令我們受益。例如,通用人工智能機器“嬰兒”的運動分為主動運動和被動運動兩類。主動運動由機器“嬰兒”自行控制車輪移動,被動運動則是車輪不動由外力(比如人拿起小車)導致車體位置變化。主動運動是主觀經驗的發動機,是從客觀環境中與傳感器一同協作感受自我邊界從而區分主客體的原動力,因此對機器“嬰兒”至關重要。只有經歷這樣的成長,才能在人與物、自我與他人、自我與環境之間形成更清晰的辨識。反觀人類自身,對那些無法有效將人與物、自我與他人進行區分的自閉症患兒而言,通用人工智能自動駕駛所帶來的病理學啓示,無疑是當前自閉症生物學假説深陷泥淖之時的一線“另類”曙光。
故而,不同於時下大燥的自動駕駛技術,通用人工智能註定走在不一樣的道路上——不只駕駛車輛,甚至品悟“人生”。
注
文章發表於《中國社會科學報》科學與人文版[1],本文為投稿原文。
[1]劉凱,賈敏. 探索基於通用人工智能的自動駕駛[N]. 中國社會科學報,2022-08-23(007).
特 別 提 示
1. 進入『返樸』微信公眾號底部菜單“精品專欄“,可查閲不同主題系列科普文章。
2. 『返樸』提供按月檢索文章功能。關注公眾號,回覆四位數組成的年份+月份,如“1903”,可獲取2019年3月的文章索引,以此類推。
版權説明:歡迎個人轉發,任何形式的媒體或機構未經授權,不得轉載和摘編。轉載授權請在「返樸」微信公眾號內聯繫後台。