百度Apollo公佈無人駕駛關鍵技術 助力實現自動駕駛全鏈條自主可控
自動駕駛已經從技術概念,發展到落地應用。在重慶、武漢等城市,市民可以用手機打到一輛無人的自動駕駛車。
在過去的近十年間,百度通過對自動駕駛領域的長期持續投入,已經建立起了世界領先的L4級自動駕駛差異化優勢。而今,百度以3477件的自動駕駛專利族數申請量位居全球第一,自動駕駛測試總里程超過4000萬公里。百度旗下自動駕駛出行服務平台“蘿蔔快跑”的訂單量已經超過了140萬單,在北上廣三個一線城市,一台無人車日均訂單量達到15次,與傳統網約車的日均訂單量相當,自動駕駛技術已經融入了國人的出行生活。此外,百度Apollo也透露了下一步計劃,那就是持續擴大業務規模,着力打造全球最大全無人自動駕駛出行運營服務區。
近日,百度自動駕駛專家團隊在Apollo Day技術開放日活動上,首次向外界全景化展示了百度Apollo的領先技術實力,公佈了自動駕駛系統感知、預測決策、規劃控制,以及數據閉環、地圖、算力等全鏈條技術方案。包括自主創新的文心大模型落地應用於自動駕駛、自主研發的AI芯片以及新一代Apollo自動駕駛地圖等在內的前沿探索,正在助力中國自動駕駛實現全鏈條關鍵技術的自主可控。
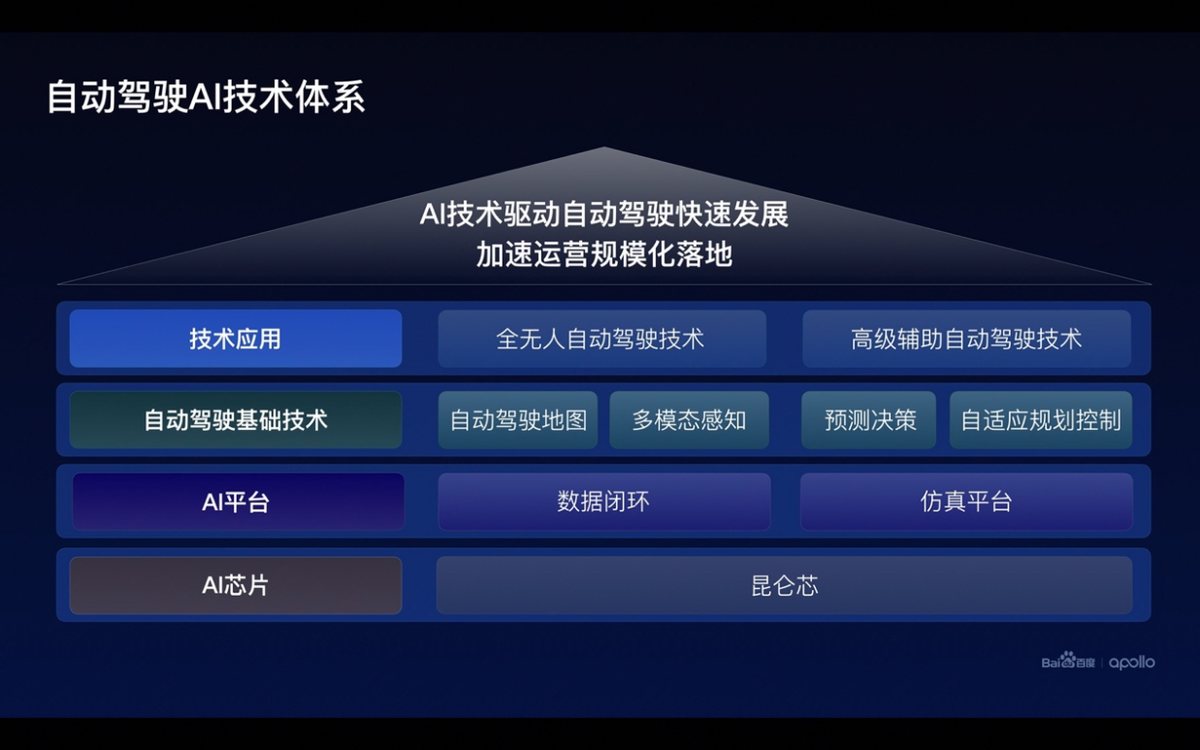
百度自動駕駛技術專家陳競凱表示,百度Apollo的勢在於多年積累的堅實AI技術底座,在此基礎上,技術團隊構建起一套安全、智能、高效的自動駕駛技術體系,形成百度引領的“中國解法”,加速實現全無人駕駛從封閉區域到公開道路的無人化規模運營。

大模型技術是自動駕駛行業近年的熱議趨勢,百度自動駕駛依託文心大模型特色優勢,率先實現技術應用突破。利用文心大模型-圖文弱監督預訓練模型,背靠文心圖文大模型數千種物體識別能力,百度Apollo大幅擴充了自動駕駛語義識別數據,如:特殊車輛(消防車、救護車)識別、塑料袋誤檢等,自動駕駛長尾問題解決的效率實現了指數級提升。此外,得益於文心大模型-自動駕駛感知模型10億以上參數規模,通過大模型訓練小模型,自動駕駛感知泛化能力顯著增強。
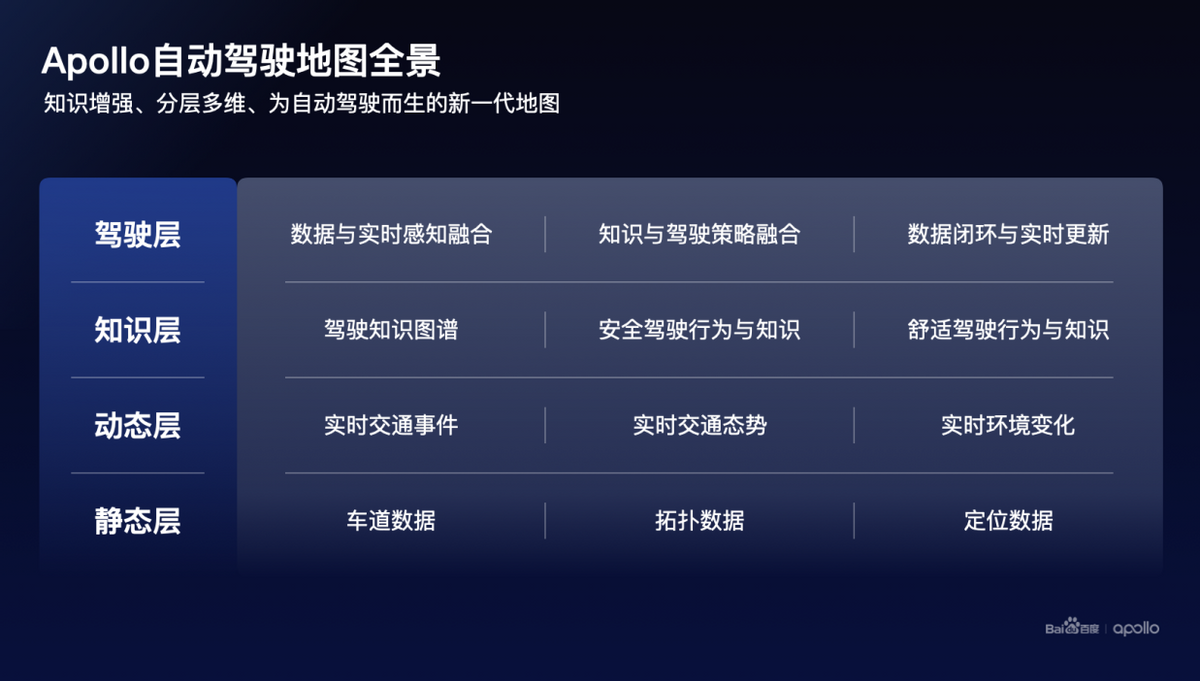
對於L4級自動駕駛而言,要達到99.99%以上的成功率,地圖是不可或缺的底層能力。百度Apollo發佈了Apollo自動駕駛地圖全景,提出知識增強、分層多維、為自動駕駛而生的新一代地圖趨勢。目前,百度高精地圖構建自動化率已達到96%,大幅解決了應用成本高的問題。同時,為保障高安全性,Apollo 自動駕駛地圖融合車端感知數據與多源地圖,即時生成在線地圖,滿足自動駕駛過程中即時更新的需求,確保自動駕駛安全。
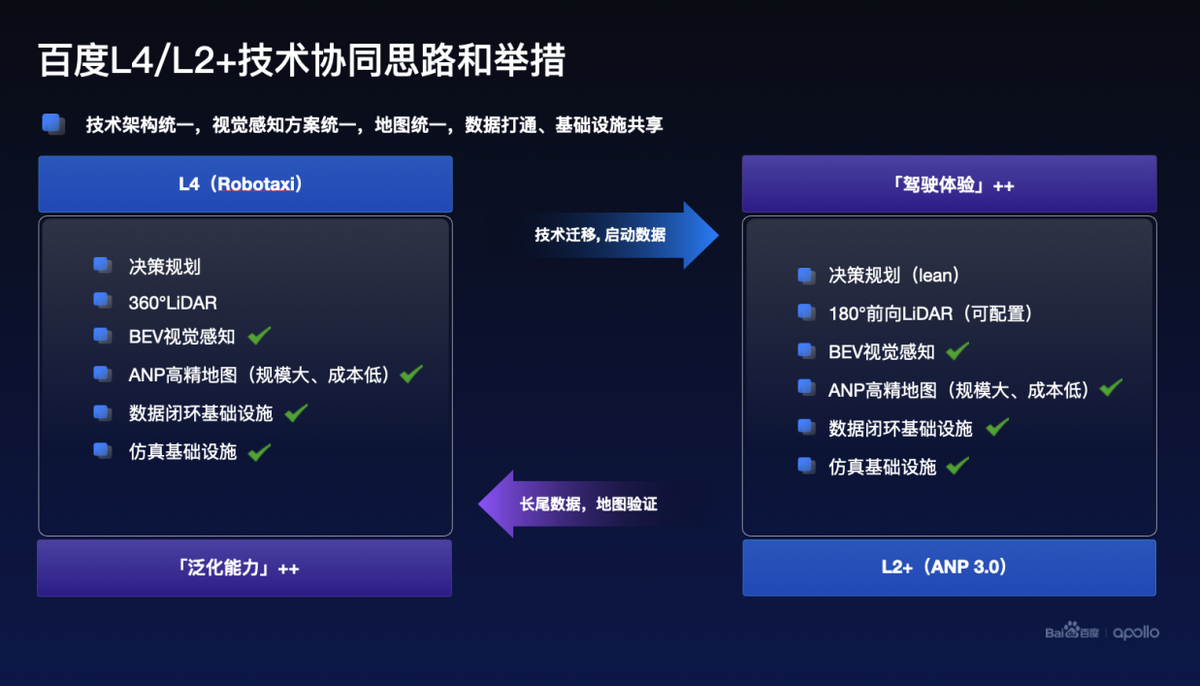
汽車智能化時代,百度也積極將自動駕駛技術落地高級輔助駕駛產品,探索L4/L2+技術共生路線。百度自動駕駛技術專家王亮認為,百度賦能汽車智能化的信心和底氣源於十年自動駕駛技術沉澱。目前,技術棧層面已實現L4與L2+智駕產品視覺感知方案統一、技術架構統一、地圖統一、數據打通及基礎設施共享。L4持將續為L2+智駕產品提供先進的技術遷移,L2數據反哺也將助力L4泛化能力提升。同時,王亮也強調高精地圖是保障L2+級智駕產品高安全、體驗好的必需必要條件。

備受關注的芯片產業,更是實現從自研量產到多場景落地的實際業務突破。
Apollo Day技術開放日上,崑崙芯科技CEO歐陽劍透露,百度自研AI芯片崑崙芯2代已完成無人駕駛場景端到端性能適配,將持續夯實百度Apollo軟硬一體優勢。