印度區域衞星導航系統:獨立自主,尋求突破_風聞
钢铁沧澜-01-11 12:32
作者:蘭順正
首發自:《中國航天報》
 近日印度防務新聞網發佈消息稱,印度將為印度區域導航衞星系統(NavIC)建造五顆更加先進的導航衞星。文章指出,至少需要7顆衞星才能保證印度區域導航衞星系統全面運作、提供準確實時數據和授時服務,還應部署兩顆備用衞星待命。而該消息也使得NavIC再次成為焦點。
近日印度防務新聞網發佈消息稱,印度將為印度區域導航衞星系統(NavIC)建造五顆更加先進的導航衞星。文章指出,至少需要7顆衞星才能保證印度區域導航衞星系統全面運作、提供準確實時數據和授時服務,還應部署兩顆備用衞星待命。而該消息也使得NavIC再次成為焦點。
印度的獨立導航之路
時至今日,衞星導航系統已經變得不可或缺,如美國的GPS在軍事和民用方面均發揮出了重要的作用,而世界各國也紛紛效仿其建立自己國家的衞星導航系統,印度也不例外。最初,由於技術相對比較落後,為了獲得衞星導航在軍事方面的使用,印度選擇與其他國家進行合作。但是長遠來看,導航系統的主動權不掌握本國手中,在關鍵時期就容易受制於人,相關國家可能會關閉本國的導航定位服務或降低導航定位服務精度,甚至注入虛假的定位信息,由此可能造成巨大損害。如1999年印度與鄰國巴基斯坦爆發的“卡吉爾衝突”,印度方面曾向美國請求利用GPS獲得位置信息,但是遭到了美國的拒絕。至此,印度真切的體會到與其他國家進行合作並不長遠,決定開發自主區域衞星導航系統,實現不依靠其他國家衞星導航系統的、獨立的區域導航定位能力。
2006年5月,印度政府批准了IRNSS(Indian regional navigational satellite system,)項目,由印度空間研究機構(ISRO)開發區域衞星導航系統。2013年7月2日印度開始發射第一顆導航衞星IRNSS-1A,2018年4月12日成功發射了第8顆導航衞星IRNSS-1I,這期間一共發射了9顆組網衞星,其中2017年8月31日發射的IRNSS-1H導航衞星,由於整流罩未能分離導致無法入軌,該次發射宣告失敗,因此目前在軌服務的導航衞星為8顆。2016年4月 29日,在印度成功地發射第7顆導航衞星後,印度總理納倫德拉·莫迪宣佈,將 IRNSS 更名為“納維克(NavIC)”,NavIC 在梵語中表示“領航者”或者“舵手”,而ISRO又將其解釋為“ Navigation with Indian Constellation(印度星座導航)”的縮寫
區域性覆蓋的NavIC
與其它衞星導航系統一樣,NavIC也分為空間段、地面段及應用終端三部分。
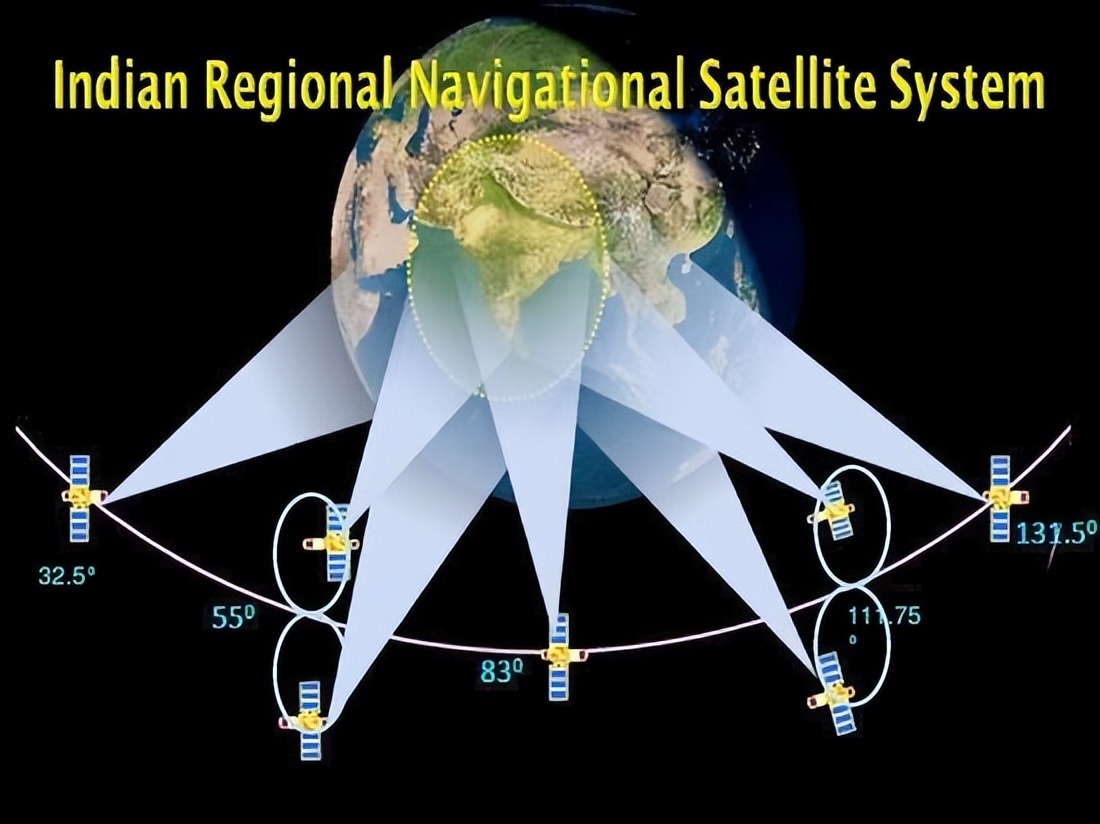
NavIC的空間段由 7 顆導航衞星組成,其中三顆為GEO衞星,四顆為IGSO 衞星,三顆 GEO軌道衞星分別定位於 34°E、83°E 和 132°E 處;四顆IGSO 衞星部署在兩個軌道面上,其軌道傾角均為29°,升交點赤經分別為135°E和 310°E,衞星的地面軌跡在赤道兩側對稱分佈,這樣在印度本土區域內,連續可見的NavIC衞星數目為7顆。另外,空間段還有一顆星載原子鐘失效的IGSO衞星IRNSS-1A,已經無法作為導航衞星使用,所以現在用來發播短報文。用IRSNN-1A 發送短報文的流程為:在發送短報文前,先要向ISRO 導航中心(INC)申請註冊,註冊用户通過互聯網將需要發送的短報文發送到INC,INC通過導航軟件 對需要發送的短報文分配身份標識號(ID),然後進行編碼;INC將編碼後的短報文發送到IRNSS-1A衞星上,IRNSS-1A衞星再用L5頻率將短報文廣播出去;持有專用短報文接收機的授權用户,可以接收到這些短報文,通過解碼即可以閲讀這些短報文。
NavIC系統地面段負責星座的維護與運行,如監測星座的運行狀態、給出衞星軌道參數修正值,注入導航數據等。包括9個衞星控制地球站(SECS)、2個導航中心(INC)、2個衞星控制中心(SCC)、17個測量與完好性監測站(IRIMS)、2 個時間中心(IRNWT)、4 個CDMA測距站(IRCDR) 、2個數據通信網(IRDCN) 以及1個激光測距站(LRS) 等。
印度建立NavIC系統目的是為服務區域內的用户提供獨立的定位、導航和授時(PNT)服務,系統服務區域可以分為兩個區域,首要服務區和次要服務區。首要服務區主要包括印度本土及周邊1500公里範圍的區域,該系統計劃在首要服務區域將為用户提供優於10米的位置服務。次要服務區是系統的擴展區域,包括我國境內大部分地區、東南亞各國、澳洲西部、非洲東部和東歐等地區,該系統在次要服務區域預計位置服務精度在20米左右。同時NavIC系統可以提供海洋陸地航空導航、遠程通訊、信息傳輸公共安全、勘測和大地測量數據處理、災害管理,以及為旅遊者提供導航等服務。另外NavIC還為用户提供授權服務,服務對象主要為印度政府部門,其中軍方是最重要的用户,可視作NavIC的軍用加密信號,該服務的具體設計精度目前仍處於保密狀態。
仍在改進的NavIC
目前,NavIC 系統發展存在兩個主要問題。
一方面,印度雖然建立了屬於自己國家的衞星導航系統,但NavIC系統的許多關鍵技術仍然依賴於其他國家,例如:星載原子鐘是衞星導航系統的核心,星載原子鐘只有具備了“高精度、高穩定性、高可靠性”的特徵,才能夠為用户提供可靠的導航服務。但是之前NavIC的所有星載原子鐘都是從瑞士精密儀器製造商斯佩克特拉·泰姆公司購買的銣原子鐘,在NavIC的每一顆衞星上都安裝了三台銣原子鐘,其中一台原子鐘為主鍾,兩台為備份鍾。ISRO從該公司一共採購 45台銣原子鐘,全部用到了NavIC的導航衞星及其備份衞星上,但是2016年 NavIC系統完成星座部署之後,星載原子鐘就出現過故障。如2017年1月30日,IRSNN-1A上的三台銣原子鐘全部失效,因此同年8月31日印度發射備份衞星 IRNSS-1H用來取代IRNSS-1A衞星,最終以失敗告終,直到2018年4月發射第 8 顆IRNSS-1I衞星才成功替換了IRNSS-1A。此次按照印度空間研究組織的消息,5顆新導航衞星中第一顆建造工作已接近完成,可能會於12月或明年3月底之前發射,而這顆衞星攜帶的4個原子鐘將包括一個印度研發的desi原子鐘。由此也不難看出印度希望在關鍵核心技術上有所突破,以真正擺脱對於他國依賴的嘗試和努力。
另一方面,NavIC系統導航信號選用了L5和S頻段,避免了與其他導航系統之間信號干擾問題,但同時對NavIC系統融入全球衞星導航系統這個大家庭產生了不利的影響。目前,印度正在研發L1頻段的“標準定位服務”信號(GPS、GLONASS等系統均計劃播發該信號),採用複合二進制偏移載波(MBOC(6,1,1/11))調製方式,以更好地與他國衞星導航系統兼容。