年內BEV落地之戰:華為遙遙領先,還是蔚小理登上王座?_風聞
HiEV大蒜粒车研所-HiEV大蒜粒车研所官方账号-06-08 09:04

落地城市NOA的第一關

落地城市NOA,是今年最重磅的自動駕駛大戰。而BEV感知,目前看來是通往城市NOA的必經之路。
年內落地BEV,已經是國內自動駕駛頭部玩家的共識。
其實,BEV是很早就提出的算法,又稱鳥瞰圖或上帝視角。直到近幾年,特斯拉將其用於自動駕駛領域,國內車企隨之佈局,才受到更多關注。
國內涉足BEV的,造車新勢力有小鵬、蔚來、理想等,科技公司有百度、華為、毫末智行等。尤其今年4月,國內新能源汽車龍頭比亞迪宣佈年內落地BEV,將大戲推向高潮。
為何要落地BEV?主要是自動駕駛場景發生了變化。
高速場景相對簡單,城市場景更為複雜,感知任務規模大幅增加,需要更多地利用深度學習。
感知層面,傳統的2D檢測已經力不從心,只有BEV能更好地完成城市場景感知任務,併為下一環節的規劃、控制打好基礎。
落地BEV,最直觀的檢驗就是城市NOA功能能否在多個城市大規模推送。這場感知算法的重大轉變,考驗的是車企的算法自研功底。

進入城市,BEV感知算法興起
故事從特斯拉重寫Autopilot軟件代碼開始。
2019年,特斯拉推出高速場景下的NOA(Navigate on Autopilot),小鵬、蔚來等造車新勢力緊隨,興起了一小股高速NOA技術潮。

直到2020年8月,馬斯克透露,團隊正在重寫Autopilot的底層代碼。
又過了兩個月,特斯拉推出FSD Beta,可以支持在城市道路場景下的NOA。支撐城市NO功能的,便是全新的BEV感知算法。
為什麼會出現這一變化?
毫末智行技術副總裁艾鋭告訴HiEV,“在特斯拉推出BEV之前,大家使用的是前視相機,周視用的很少。高速上,車密度不大,側後方用一些雷達也夠了。進入城市後,車流量開始密集,僅看正前方也不夠了。BEV的出現,核心在於需要做360度的感知。”
特斯拉重寫代碼的同年,蔚來和小鵬也開始轉向。
蔚來引入原Momenta研發總監任少卿,任的背景是計算機視覺研發,加入蔚來後負責算法團隊,開始在Mobileye方案外啓動自動駕駛自研。
小鵬也開始研發基於XNet的BEV感知架構。2021年的1024科技日上,吳新宙透露,在過去6個月裏,每一個預測和規劃代碼全是重寫的。
對於兩家重寫代碼這件事,均勝電子副總裁郭繼舜向HiEV表示,“週期性重寫代碼是對產品和系統認知提升後的必然階段。在工程化方面,該踩的坑基本都要踩一遍,大家都需要階段性更新代碼和架構。”
從已有信息看,基於BEV研發全新算法,小鵬們的做法相似。大家均是從靜態BEV網絡算法、動態BEV網絡算法部署算法。
靜態BEV解決的是道路結構還原,感知對象是車道線、道路邊界、停止線,可以解決部分攝像頭被遮擋、車道線模糊等問題。
動態BEV解決的是交通參與者的還原和預測,感知對象車輛位置、姿態、尺寸、速度,可以在車輛同時出現在多顆攝像頭視野內,可以穩定地追蹤和感知出物體的距離和速度。
在BEV出現前,傳統2D檢測的好處是整個計算非常直觀,但整個投影過程都是使用軟件的方式,沒辦法形成端到端,會出現信息丟失、誤差等問題。
BEV的到來,將讓小鵬們獲得更強的360度感知能力。
不過,這裏面的難度並不小。

複雜的代碼,以及昂貴的數據標註
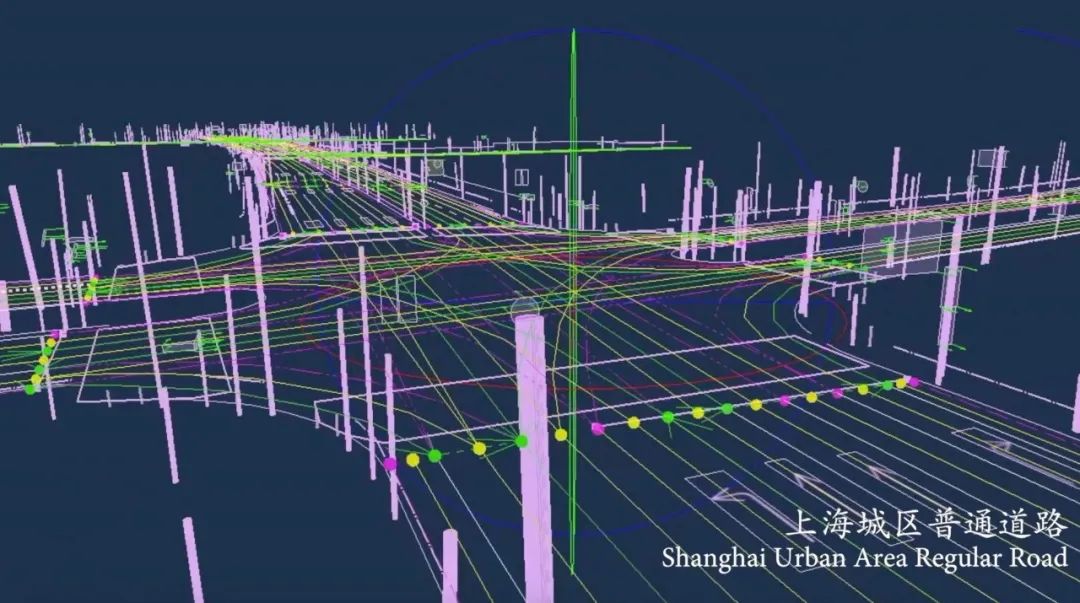
BEV,全稱Bird’s eye view,本質上多個目標前融合感知方案。
簡單理解,它是將攝像頭等傳感器採集的2D為主的圖像數據,轉化為3D座標空間下的數據,從而實現對物理世界的真實還原。
特斯拉的做法大致是:
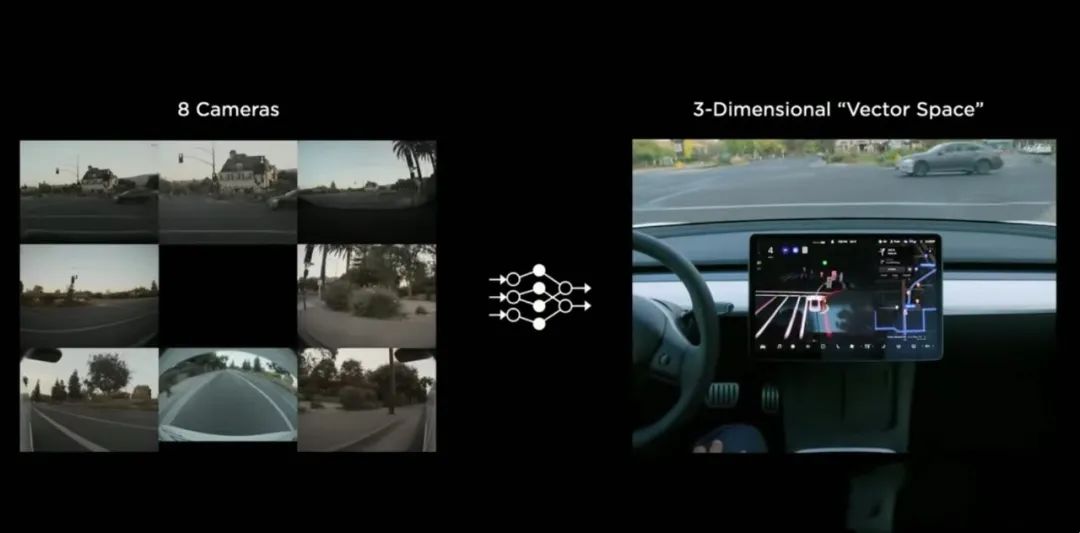
基於純視覺,利用8個攝像頭採集數據,通過深度學習的主幹網絡Backbone對各個攝像頭進行特徵提取,再通過Transformer將2D圖像轉化為3D空間。
應用的技術並不新潮。
Backbone的本意是人的脊樑骨,在深度學習中被引申為主幹網絡的意思,其主要作用是就是提取圖像的特徵。
Transformer最早在2017年由谷歌提出,是利用注意力機制(Attention)來提升模型訓練速度的模型。將Transformer發揚光大的是GPT,也就是Generative Pre-trained Transformer。
通過BEV和Transformer,特斯拉開始獲得全新的“上帝視角”下的數據。並在此基礎上為數據加上了時間戳,形成了4D空間。以用於對目標物測速,乃至對目標物的運動軌跡進行預測。
可以説,BEV改進了自動駕駛看物理世界的視角,可以更高效、準確地獲取感知數據,這為後面的規劃和控制提供了基石。
國內的自動駕駛玩家已經認可了這種方式,並且紛紛佈局。
與特斯拉不同的是,國內玩家之前的方案中,在攝像頭之外增加了更多的傳感器和定位系統,比如超聲波雷達、激光雷達、高精度地圖等。
方法論相似,挑戰在於融合困難,以及更多的代碼量、數據標註工作。
寫代碼是一項繁重的任務。
小鵬汽車自動駕駛副總裁吳新宙披露,城市NGP的代碼量是高速NGP的6倍、感知模型數量是4倍、預測、規劃、控制相關代碼量是88倍。

為BEV的數據進行標註,同樣需要大量的工作。
舉個例子,要構建實時語義地圖,需要對數據進行結構性訓練,基於BEV模型做數據的標註、分割、分類。僅標註一項,根據毫末智行CEO顧維灝預測,BEV的模型大概需要標註****1億公里的數據。
智能駕駛數據服務商柏川方面告訴HiEV,數據標註行業單人單月的綜合成本約為四千元,千人規模的標註團隊一年成本要達到1億元。
另一位從事數據標註的業內人士向HiEV表示,“要標註1億公里的數據,實際上會有失效率,按照50%的失效率計算,假定都是簡單場景,每人每天標註2km,需要一萬人的團隊標註至少四年的時間。”
好在,特斯拉已經探了路。
早前,特斯拉有一支千人規模的人工標註團隊,後來開始增加自動標註和虛擬仿真等工具。
對此,上述數據標註從業人士表示,“特斯拉的自動標註是行業風向標,其預標註技術目前行業最優。加入自動化標註模型後,假定可以提效80%,可以將1萬人團隊的標註時間縮減到一年。”
小鵬、毫末智行等已經感受過人工標註的成本之昂貴,開始探索自動標註。其他各家,也可以進行借鑑。

BEV帶來的變化:
方案“減配”,芯片合作更緊密
BEV帶來的第一個變化,是讓自動駕駛配置開始縮減。
在沒有佈局BEV之前,國內車企是最早通過高精地圖來實現自身定位。車規級激光雷達成熟後,車企又加入了激光雷達。
佈局BEV算法後,一些車企們開始由原來的堆砌配置,轉為縮減配置。
大家發現,BEV可以實時生成語義地圖,進而替代高精度地圖,甚至還可以去掉超聲波雷達。
事實上,小鵬早期並不打算去高精度地圖。
吳新宙曾提到,對於城市場景,高精地圖的鮮度非常關鍵,小鵬汽車正在和高德地圖一起努力,希望發佈的時候能夠做到天級更新高精度地圖的能力。
不過,耗資幾千萬可以買下高速道路的高精度地圖,但要買下城市場景下的高精度地圖,費用又是另一個級別。
更何況,獲取地圖審批資質的效率,也會耽誤自動駕駛向多個城市推送的進程。最終,車企們不得不進入自動駕駛的縱深地帶,利用技術甩掉高精度地圖的枴杖。
這裏面也有一定挑戰。
“BEV去高精度地圖,很多公司不一定能搞定,需要做大規模的雲端場景重建、自動化的元素提取。另外,純拓撲的任務還是很難,很多時候會因為遮擋、車道線不清晰而難以實現。”宏景智駕高級工程經理柴可寧告訴HiEV。
至於BEV是否會去掉激光雷達?
特斯拉的答案是,利用Occupancy佔用網絡,以及4D毫米波雷達的點雲信息,就能替代激光雷達。
國內是另一重景象。
國內目前尚未興起去激光雷達的苗頭。艾鋭認為,激光雷達不會由於BEV算法的出現而被替代。
“在夜間,攝像頭根本看不見。激光雷達是一個物理傳感器,可以主動發射信號。對高端車型來説,可以讓車輛多一重安全性。對於中低端產品來説,成本相對較高,只有追求極致性價比,才會去傳感器。”他解釋道。

其實,基於純視覺還是多模態,本質上不是技術問題,而是一個商業成本問題。從技術角度,多模態的效果肯定更好,但從成本角度,多模態的上車搭載量會少。
BEV帶來的第二個變化,是需要芯片廠商更好地適配,與車企形成深度合作。
因為,BEV方案比較考驗芯片對於算子的支持能力。
除了特斯拉採用自研FSD芯片外,頭部自動駕駛玩家更多地基於英偉達Orin X落地BEV方案,且以雙Orin X為主,算力高達508TOPS。
對此,艾鋭表示,“英偉達的芯片基礎計算單元是CUDA,非常小,也非常靈活,對算子的支持能力非常強。”
而如果算力小了,要實現同樣的幀率,就需要做特別的算子優化。
事實上,一套標準的BEV算法,現在的很多芯片都不支持,大家在用各種各樣的算子去替換它們,這就需要芯片廠商和主機廠深度配合。
今年4月,比亞迪在上海車展宣佈基於地平線征程5的自研BEV方案將在年內量產。目前,地平線可以向車企提供BEV參考算法,且正在佈局Occupancy佔用網絡。雙方的合作,將是基於征程5落地BEV的首個案例。
最後,BEV技術的強大感知能力,不僅吸引了乘用車競相佈局,也在商用車裏面開始應用。
比如,摯途科技的BEV方案,便針對商用車型車身長、檢測盲區較大的特點,向車企提供攝像頭選型和安裝位置方案,可以實現前方300米範圍的檢測,且增加了車身和近距離的感知冗餘。
頭部車企闖關BEV感知時,其他傳統車企會面臨更大的壓力。

後來者,自研還是外包?
對於BEV方案,發力較晚的車企其實有着更多選擇。
一種是自研。
要做BEV方案,方向大致已定。需要選一套傳感器方案,基於大算力芯片進行開發。另外,還需要自動標註閉環系統,以及用於數據訓練的智算中心等等。
時間上,做BEV的週期相對造車更短。
“主機廠從傳統2D檢測轉到BEV感知,如果要把數據準備都算上,快的話需要一年時間。”艾鋭説。
投入事項明確,週期相對較短,這決定了車企可以進行自研。
我們也注意到,除上述幾家佈局BEV的車企外,其他玩家也在準備入局。
今年1月,長安汽車智算中心GPU算力擴容集成項目開始招標。2月,吉利星睿智算中心在湖州長興揭牌。
另一種是與供應商合作。
如果看整個國內汽車市場,會發現自動駕駛方案供應商也有其存在價值。
除了造車新勢力覆蓋的30萬以上的高端市場外,中低端市場十幾萬以上30萬以下的車,仍然是主流。

據HiEV瞭解,毫末智行將基於十幾TOPS的芯片運行BEV算法,“硬件成本上,幾千塊錢就可以做到城市NOA,類似的產品很快也會出現。”
一些之前佈局L4的科技公司,比如小馬智行、元戎啓行、商湯絕影等,也在推出BEV的方案。這些公司做BEV,優勢在於之前的算法更易於遷移。
理論上,這些公司不會面臨華為向車企提供解決方案時的“奪走靈魂”的質疑。
“華為太大了,它有能力做任何事,包括造車。我們很小,而且非常開放,車企不需要擔心失去靈魂。”一位自動駕駛解決方案供應商的高管表示。
“在BEV上,我們願意賦能車廠,是服務者的心態。很多時候,車廠對我們感興趣的就是真值系統,它一年有幾千萬的標註預算,搭載真值系統後,可以降到幾百萬,肯定會感興趣。整體上,車企對我們的感知算法很感興趣。”柴可寧説。
“從技術演進趨勢看,不是零和博弈。作為一個解決方案供應商,我們的算法、雲端中心還是有一定的領先性。”商湯絕影量產行車智能駕駛研發負責人蔣沁宏表示。
如果車企不想重複造輪子,至少在可見的一段時間,與解決方案供應商合作,儘早進入自動駕駛的賽道是一個好的選擇。

基於BEV的城市NOA,
年內將落地百城
還記得2020年下半年,蔚來推出基於Mobileye的高速NOP功能,小鵬則基於英偉達Xavier推出了高速NGP。
如今,三年時間不到,大家又開始比拼基於BEV感知架構落地城市NOA的效率。
一個例子可以看出各家競爭的激烈。
最近,小鵬發佈了一項名為“通勤模式”的功能,又被稱為微縮版城市NGP,可以在無圖方案的四五線城市使用。
“聽説我司預告城市通勤模式之後,有兩家友商已經快速決策分別從宣傳和實際行動上致敬一下子。”小鵬汽車自動駕駛產品高級總監劉毅林在社交平台上發文表示。
今年以來,各家陸續公佈基於BEV的城市NOA落地計劃。
小鵬計劃今年下半年,將在大部分無圖城市開放變道、超車、左右轉能力;
蔚來已經推送的Banyan2.0.0版本,切換為了BEV架構,下半年將推出帶有城區能力的NAD Beta版本;
理想的城市NOA將在第二季度內開啓推送,並於年底前完成100個城市的落地推送;
其他玩家,毫末智行、華為、比亞迪,也將在今年落地BEV方案。
中國有600多個城市,按照各家計劃,年內將有接近六分之一也就是近百家城市可以使用城市NOA功能。
對於這些大力投入的玩家來説,有的需要維護一早立起的自動駕駛一哥的江湖地位,有的蓄勢通過城市NOA規模落地打一個後來居上的漂亮翻身仗,也有的要證明自己在自動駕駛領域也是遙遙領先,也有的要藉助車企,為更大的市場立一個標杆產品,一切都將在下半年出現定論。
各家競逐城市NOA落地時,還有一家真正的巨頭正在候場。目前,特斯拉FSD Beta已經在海外城市範圍內推送,進入國內只是時間問題。
如王傳福所説,新能源汽車的上半場是電動化,下半場是智能化。
在電動化競爭階段,大家還有傳統造車工藝可供依仗,智能化的競爭階段,將是包括BEV感知、規劃、控制,以及智能座艙等在內的各個點位的全方位競賽,更加考驗車企的軟件研發能力。經歷BEV算法落地大戰後,車企的核心技術將再次重塑。
