和小狗同台競技,機器狗輸得有多慘(狗頭_風聞
把科学带回家-把科学带回家官方账号-专注于孩子的科普教育06-11 17:53
2005年,機器狗“大狗”(BigDog)問世。雖然名叫大狗,但它更像一隻騾子,步態非常笨拙。

“大狗” | Boston Dynamics
面對波士頓動力公司開發的第一隻機器狗,有網友不禁調侃:“經過多年的研究和數百萬美元的投入,工程師們終於能夠準確地再現兩個醉漢扛一個沙發的場景。”

網友調侃這是兩個醉漢在扛一個沙發
| Boston Dynamics
這些年,經過無數測試和改進,機器狗的身手越來越矯健。波士頓動力最新研發的機器狗Spot可以進入危險環境進行探測,幫助警方檢查可疑的包裹,工作忙完後還能來一段舞蹈。
會跳舞的機器狗Spot | Boston Dynamics
然而,在機器狗不斷變強的同時,**“它們究竟有多敏捷”**這個問題一直無法被精確測量,因為該領域目前仍缺少一個標準的、直觀的評估方法。
創造出和動物或人類同樣敏捷的機器人是許多人的目標,對此,谷歌DeepMind研究團隊認為要想實現這個目標,應該先研究出一個基準測試。於是,通過借鑑狗狗的障礙賽,研究團隊也給機器狗辦了一個敏捷性障礙賽。
給機器狗辦一個障礙賽
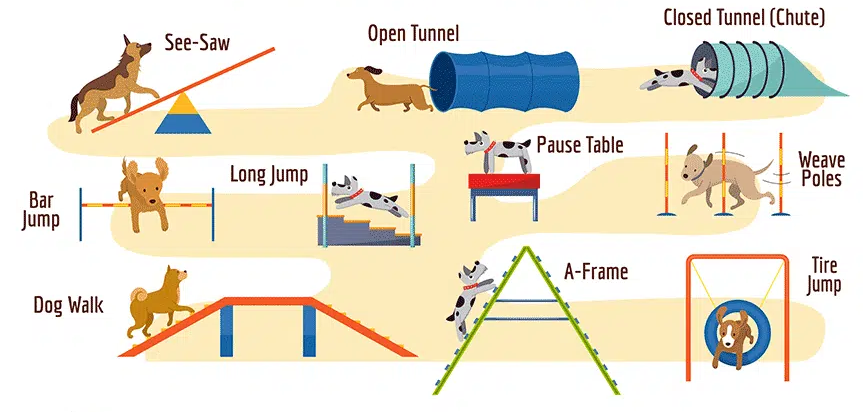
犬敏捷比賽規定,參賽犬需要在一定的時間內以正確的順序通過不同的障礙物。對小狗而言,這就是測試它們敏捷性的體育考試。現在,機器狗也要參加這樣的體育考試了。
在谷歌的實驗室裏,研究人員搭建了一個類似的障礙訓練場。由於場地有限,為了儘可能多地測試不同的技能,研究人員把考核項目分為3個不同的類型——S形連續繞杆,A 字形上下坡,以及0.5米寬的跳躍障礙。
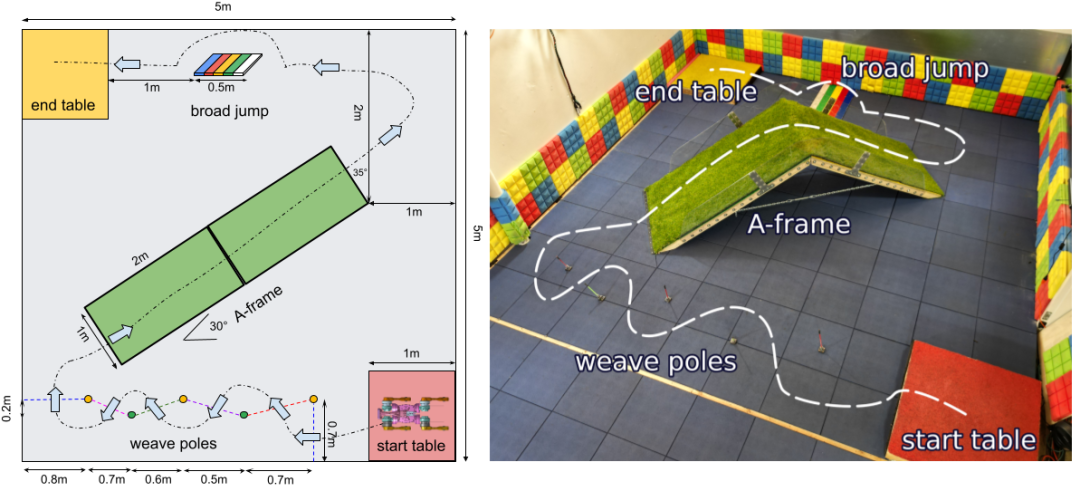
研究人員在實驗室裏搭建的犬障礙訓練場 | Google
評分規則也借鑑了犬敏捷比賽,不過做了一些簡化。參賽犬必須在規定時間(10.64 秒)內完成障礙賽,越快完成,得分就越高。得分1表示參賽犬在規定時間內通過了所有障礙,但是如果出現失誤或太慢了就會受到處罰:忽略某個障礙,或以錯誤的順序或方向通過障礙,或越過障礙失敗,得分就減0.1;另外,每超過規定時間一秒,得分就減0.01.
除了速度,這一系列障礙也考驗了機器狗的反應能力和控制技巧。有時候,機器狗會在測試途中摔倒。為此,研究人員開發了一個讓機器狗自我恢復的算法,以及一個走回起點的算法。這樣,機器狗在摔倒後就能迅速地自己站起來,然後走回起跑線重新開始。對於一個需要不斷重複的實驗而言,這些算法能夠保持機器狗的穩定性,把人為干預降到最少。
實驗中,機器狗摔倒了會自己爬起來 | Google
谷歌是一家對寵物友好的公司,員工可以帶狗上班。為了確保機器狗的障礙賽是實際可行的、有挑戰性的,研究人員特意邀請了同事家的小狗前來參加。

谷歌員工的小狗也來參賽 | Google
實驗結果顯示,兩者的敏捷性有明顯的差距。一隻未經訓練的小狗不到10秒就能跑完所有障礙,得到1分。相比之下,機器狗雖然也可以達到0.91的好成績,但需要大概20秒,並且大部分用時都集中在20~30秒。
小狗狗 vs. 機器狗 | Google
此外,實驗結果還顯示,機器狗在S形連續繞杆、A 字形上下坡這兩個項目中的表現不錯,但是它的跳遠能力還有待加強——在起跳或者落地時經常觸碰到跳遠板。
機器狗的跳遠能力有待加強 | Google
綜合來看,機器狗敏捷性的提升還有很大的潛力。
障礙賽的規模可以更大
有百萬粉絲的視頻博主扎克·奧爾索普(Zac Alsop)也做過類似的實驗。他花了大概2萬人民幣購買了一隻機器狗(Unitree Go1),並向知名的訓狗教練員尋求幫助,希望通過三天的嚴格訓練,讓他的機器狗和真的狗狗們同台競技,贏得犬敏捷大賽。
比賽當天,扎克和他的機器狗招來了許多觀眾的好奇圍觀,比賽時也得到了大家的熱情助威,但他們最終還是以失敗結束,輸得“人仰狗翻”。

扎克帶着一隻機器狗去參加犬障礙賽 | Zac Alsop
和扎克他們參加的比賽相比,谷歌開發的這個犬敏捷比賽確實小了很多,但是機器狗小跑、跳躍、側向運動和攀爬的基礎技都能得到測試。研究人員也表示,這個機器狗敏捷性測試也適用於一個更大的場地,可以很方便地添加更多的犬敏捷障礙設置。
機器狗敏捷性測試的規模可以擴大 | caninejournal
目前,機器人行業內的一個重要研究方向是如何開發出一個更好的控制器,好讓四足機器人能夠像動物一樣敏捷。而要想量化機器人的敏捷性,谷歌的機器人研究團隊認為應該先開發一個基準測試。他們把此次敏捷性測試取名為Barkour(Benchmarking Animal-level Agility with Quadruped Robots)。
Barkour基準測試直觀地展示了機器狗的敏捷性,待機器狗繼續發展下去,説不定哪天我們還能看到它們在賽場上跑酷(Parkour)。
撰文 | Cloud
審校 | Skin
參考資料:
[1] Barkour: Benchmarking animal-level agility with quadruped robots. (2023, May 31). Retrieved from https://ai.googleblog.com/2023/05/barkour-benchmarking-animal-level.html
[2] Paul, A. (2023). Google engineers used real dogs to develop an agility course for robots. Popular Science. Retrieved from https://www.popsci.com/technology/google-barkour-robot-dog-agility
[3] Heater, B. (2023). Google DeepMind introduces Barkour, a benchmark for quadrupedal robots. TechCrunch. Retrieved from https://techcrunch.com/2023/05/30/google-deepmind-introduces-barkour-a-benchmark-for-quadrupedal-robots/?guccounter=1&guce_referrer=aHR0cHM6Ly93d3cuZ29vZ2xlLmNvbS8&guce_referrer_sig=AQAAAKDmAkahE2yUepvA8f-ssiFqZ4qVguH-7il-ysECThS4eds78sePrj0KvwQ_0STaM0CW4FZ0FcOzNxllpuH0I1HNiNQtonusYqWgNEmjJ-xvPvtydReO7zwZSydFKT72Zy6xlovuBmrofF2g17fpq5B-_3J6b91wU0Inbew2d3gc
[4] Smith, L., Kew, J. C., Peng, X. B., Ha, S., Tan, J., & Levine, S. (2021). Legged Robots that Keep on Learning: Fine-Tuning Locomotion Policies in the Real World. arXiv, 2110.05457. Retrieved from https://arxiv.org/abs/2110.05457v1
[5] Barkour: Revolutionizing Quadruped Robot Agility With New Benchmark & Locomotion Policy | CJ&CO. (2023, May 27). Retrieved from https://www.cjco.com.au/article/news/barkour-revolutionizing-quadruped-robot-agility-with-new-benchmark-locomotion-policy
[6] Caluwaerts, K., Iscen, A., Kew, J. C., Yu, W., Zhang, T., Freeman, D., …Tan, J. (2023). Barkour: Benchmarking Animal-level Agility with Quadruped Robots. arXiv, 2305.14654. Retrieved from https://arxiv.org/abs/2305.14654v1
[7] Dynamics, B. (2023, April 19). See Spot Work | Boston Dynamics. Youtube. Retrieved from https://www.youtube.com/watch?v=gvzljfK-PiU
[8] Alsop, Z. (2023, May 20). I Entered A Robot Dog Into A Dog Competition. Youtube. Retrieved from https://www.youtube.com/watch?v=JP5FJ7fEyyc
[9] Iscen, A. (2023, May 24). Barkour: Benchmarking Animal-level Agility with Quadruped Robots. Youtube. Retrieved from https://www.youtube.com/watch?v=EcYzl_qWLKg