特斯拉FSD入華在即,本土智駕公司開啓BEV架構對決_風聞
HiEV大蒜粒车研所-HiEV大蒜粒车研所官方账号-12-01 08:02
作者 | 張祥威
編輯 | 德新

硬核BEV玩家進場
深度學習逐漸取代基於規則的研發方式,這一趨勢正在自動駕駛賽道愈演愈烈。
11月29日,智駕科技MAXIEYE發佈BEV平台架構——青雲Hyperspace,並面向行業開放BEV感知標準件,以及發佈輕地圖NOA量產方案和行泊合一高階域控產品。
MAXIEYE的思路與特斯拉等頭部智駕玩家一致。如今BEV+Transformer已經成為主流的自動駕駛技術路徑,也是眾多車企關注的核心能力。
青雲BEV架構是MAXIEYE在三年前找到的解題思路。
據MAXIEYE創始人兼CEO周聖硯介紹,從最初的幾十人,到迅速投入上百人,再到後來全公司三百多人全力以赴,公司在L2的基礎上,用了兩年時間打磨真值系統、數據閉環等能力,也就是養「雞」,剩下一年多讓這隻雞可以生蛋,也就是推出基於BEV的諸多產品。
基於深度學習的自動駕駛時代正在加速趕來,這家本土智駕公司無形中開始與特斯拉、華為、小鵬等智駕玩家同場競技。

面對海量Corner Case,
MAXIEYE兩年養「雞」
還有幾天,MAXIEYE將是一家成立七年的公司,這家公司發展歷程中有兩個重要節點:
以2020年為界,之前四年佈局的是L2賽道,推出了LCC、AEB等功能方案;
2020年之後,佈局L2+,基於BEV架構,推出了高速無圖NOA、城市記憶行車等功能方案。
也正是在佈局L2+初期,團隊發現基於規則的CNN去處理道路場景下的問題時,陷入了Corner Case的「汪洋大海」。
周聖硯回憶,「基於傳統CNN圖像檢測做L2產品,算法框架包括前處理、後處理、規劃都相對比較完整。這個過程中,我們遇到了很多Corner Case,工程師用一些經驗、先驗知識,把一些誤差約束住,但我們逐漸發現,這種通過打補丁的方式,是不可能做到L4的。」
以「車道居中」功能為例,平面道路時還好,如果遇到上下坡,就需要做一些補丁去修復,才能保證一致性。當車輛通過減速帶,發生顛簸又會讓傳感器映射的後處理模型超出容忍邊界,需要打很多補丁。
類似的Corner Case不勝枚舉。
團隊開始轉換思路,內部立項一個名為“上帝視角下的真值系統”項目,這是一種類BEV架構的底層技術棧,由20多人主導推進。

半年後,特斯拉在2021年的AI Day發佈了BEV架構,MAXIEYE團隊驚喜地發現,兩家的技術思路是一致的,於是直接將BEV算法團隊從20人迅速增加到100人,這在當時比較少見。要知道,許多公司直到今年,才開始搭建真值系統。
今天市場上的「無圖城市NOA」、「無圖高速NOA」,在周聖硯看來,都屬於「蛋」,要獲得這些蛋,首先得養「雞」,也就是打磨真值系統等在內的能力。
這家公司用兩年時間做了幾件事:
搭建真值系統,以及基於真值系統的數據標註,4D結構化的場景重建和仿真。
在BEV下,真值標註的結果是視頻序列,而不再是之前的一張張圖片。此前,標註100萬張圖片,L2就可以量產。基於BEV後,100萬張圖片轉換成視頻,才兩個小時不到。強數據依賴的BEV,對於數據的標註精度、數據標註效率提出了很強的要求。
最終,MAXIEYE推出的青雲BEV架構,可實現道路拓撲橫縱向精度的顯著提升,橫向拓撲精度5公分,縱向拓撲精度誤差1‰,穩定性趨近於真值。
這個精度相當於什麼水平?
周聖硯解釋,「和高精地圖相比,基於BEV橫向5公分,比高精地圖的精度還要高。縱向拓撲精度誤差1‰,指的是在前方100米處發現換道的分叉點,這個分叉點,前後不會差10公分,這是千分之一的精度,完全夠做無圖(去高精地圖)方案了,因為它比高精地圖+高精定位兩個的組合的精度還要高。」

青雲BEV架構,以及技術底座
青雲BEV架構包括三大網絡:道路拓撲、目標軌跡、佔用空間。
其中,利用拓撲元素,加上組合導航算法,青雲BEV架構可支持一次性完成自動化建圖記憶,奠定記憶共享技術實現的基礎。
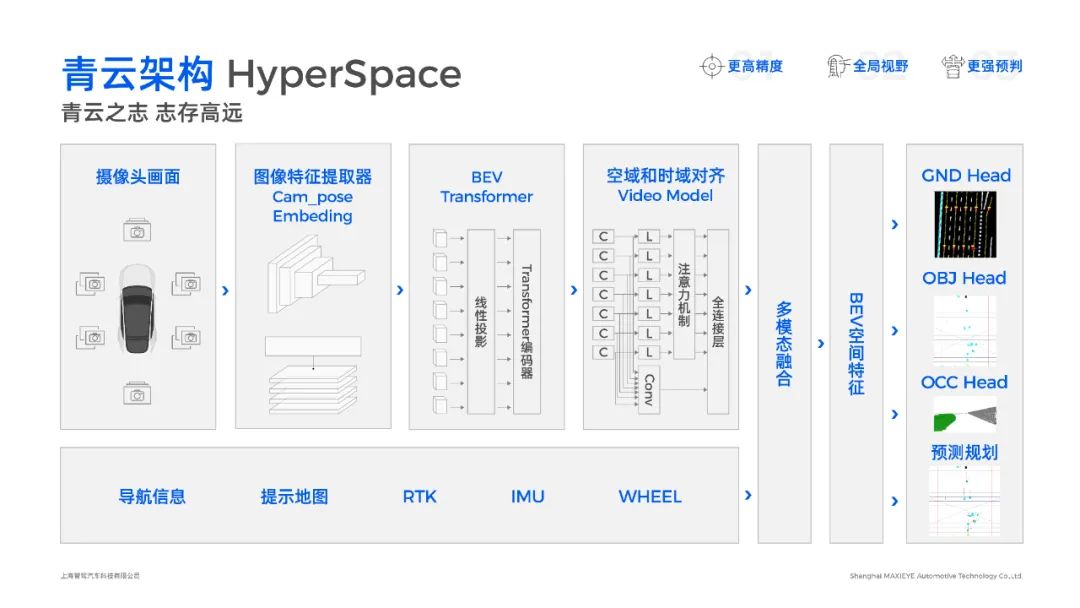
三大網絡下,MAXIEYE還形成了一套技術底座,包含真值系統、4D場景構建、數據自動化處理能力等。
多位熟悉特斯拉的人士告訴HiEV,「拋開數據標註團隊,特斯拉的自動駕駛團隊大概在兩三百人左右。」
作為對比,MAXIEYE用一支300多人的團隊,在能力側搭建了一套包含真值系統的創建、4D的場景還原等的體系能力,可見這支團隊的能力之紮實。
據MAXIEYE官方介紹,其發佈的海市MAXI-DI數據智能體系,包含量產數據閉環MAXI-DATA、真值系統MAXI-TRUTH SYSTEM、MET-TOOL全流程閉環測試開發工具鏈,以及仿真極限場景構建。
量產數據閉環系統涵蓋了包括功能觸發、駕駛行為觸發、系統觸發、感知觸發四大模塊 - 30餘種觸發機制,例如典型的AEB功能觸發回傳,可有效針對極限場景收集價值數據,打通車端-雲端數據通路和算法迭代-OTA的應用閉環。
目前,這套數據閉環系統已實現超3億公里的駕駛場景數據積累。

針對自研深度學習算法的訓練需求,MAXIEYE搭建和開發了MAXI-TRUTH SYSTEM真值系統,實現4D場景構建、自動化數據處理和訓練,這為青雲BEV算法架構提供了高效的底層技術支持。
MET-TOOL是MAXIEYE為服務於客户高效、敏捷開發需求研發的開發工具鏈,覆蓋智能駕駛系統從原型開發、實車測試、功能量產的全流程閉環,支持分級閉環測試、代碼調試和數據回灌等功能。
官方稱,MET-TOOL全流程閉環開發工具鏈,可將客户量產項目研發效率提高20倍,測試效率提升至少10倍,大大縮短項目量產上線週期。

基於青雲BEV,重構全平台產品
基於青雲BEV架構,MAXIPILOT 2.0平台隨之發佈。
這是一套BEV重構的全系產品方案,覆蓋從單V(牧童Monotogo解決方案)到多V(5V、6V、9V及以上-跨越低中高算力的行泊合一域控方案)的全平台解決方案矩陣,滿足城市L2增強、高速NOM(Navigate on MAXIPILOT)、城區NOM、行泊合一、記憶行泊車全場景應用。
借鑑當下流行的車型版本分級方式,MAXIPILOT 2.0 分為Lite、Pro、MAX三個版本。
其中,Lite主打城市增強L2方案,依託青雲BEV技術解決當下L2體驗不連續的產品痛點,例如L2系統在路口場景容易退出/道路拓撲變化體驗不佳等。
Lite包含BEV一體機和MDU20域控兩種產品形態,覆蓋20萬元以下車型細分市場實現智慧化升級,支持極高性價比的輕地圖高速NOM(Navigate on MAXIPILOT)應用落地。
Lite版也是行業內唯一支持BEV部署的前視一體機高性價比算力平台方案,定位覆蓋日常行車70%以上場景的千元級別產品,基於單個BEV一體機數據閉環,足以驅動關鍵路口/特殊道路拓撲等場景數據獲取,可以幫助車廠客户高效開城。

MAXIPILOT 2.0 Pro基於5R6V的傳感器配置,單SOC實現行泊高度合一,是中算力平台又一性價比之選,支持實現高速地圖NOM、記憶行泊車等智慧化功能方案。
MAXIPILOT 2.0 Pro支持佔用空間網絡部署,支持輸出BEV特徵抽取後的特徵地圖(DREM-Deep learning REM),以數據合規方式上傳雲端,通過記憶地圖共享實現高效開城。
MAXIPILOT 2.0 MAX主推nR9V的傳感器配置方案,能夠更好地應對城區複雜交互環境。同時方案可選裝前向激光雷達,作為城區視覺冗餘的多重保障。
MAXIPILOT 2.0 MAX的亮點在於,方案可以通過複用2.0 Lite和2.0 Pro積累的海量價值數據,實現成本可控、節奏可控的開城。而在2.0 Pro上的數據閉環,則可以支撐面向下一代端到端的技術新範式。
上述產品之外,MAXIEYE還發布了“啓明星計劃”,面向全行業開放BEV感知標準件。
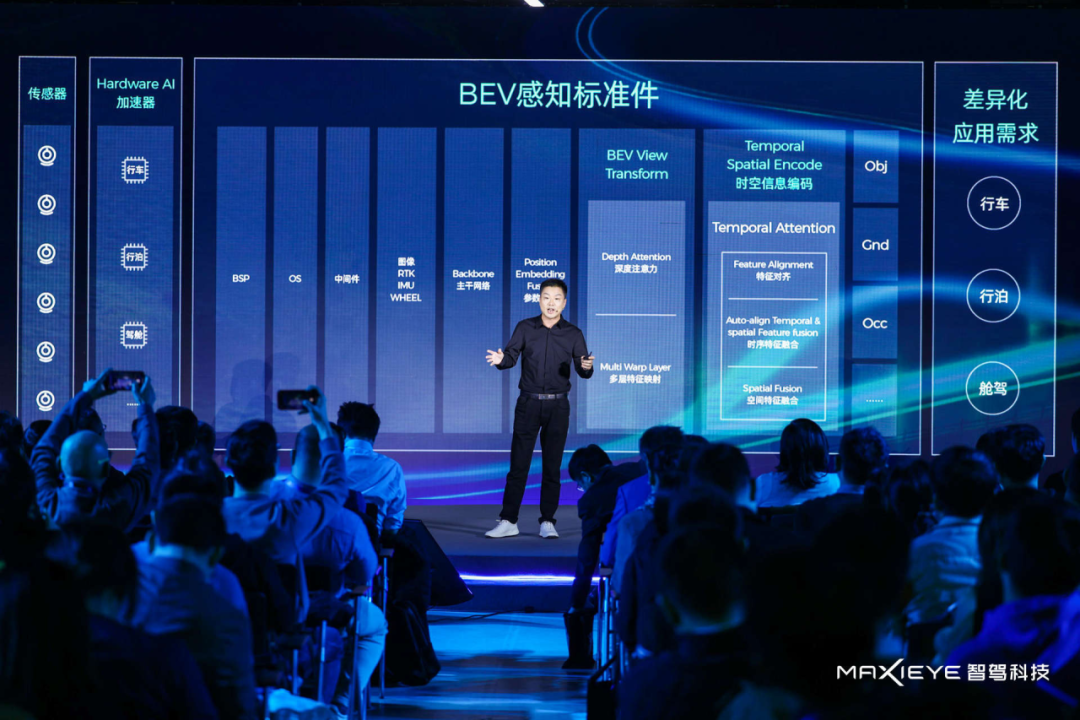
青雲BEV架構感知標準件,支持軟硬解耦,實現標準化工具鏈、標準化規控接口、標準化ISP。通過敏捷的算法移植能力,可支持在6個月內實現高效跨平台開發需求。面向智慧出行產業鏈上下游合作伙伴,提供應用場景多元化、產品形態多元化、合作模式多元化的感知平台接口,加速高階智能化產品的應用繁榮。
為了滿足車廠客户對芯片戰略和平台戰略的差異化訴求,MAXIEYE基於行車芯片、行泊芯片、艙駕芯片等硬件平台,實現敏捷嵌入式開發和功能層深度定製化,這可以讓車廠大幅降低項目開發成本、提升開發效率,保障方案兼容性、連續性和可擴展性。
同時,青雲BEV感知標準件可滿足車廠海外芯片和國產化芯片的橫向佈局。目前,MAXIEYE已經開發了全國產化芯片L2一體機,主打科技平權下的高性價比。

高速、城市NOA競爭的本質,
是基於BEV的數據競爭

MAXIEYE的L2產品,已經在諸多乘用車上量產應用,包含哪吒V、廣汽傳祺ES9、廣汽傳祺GS8、廣汽傳祺E8、合創V09、合創A05、廣汽埃安S、廣汽埃安S MAX、廣汽埃安Y、昊鉑HT、昊鉑GT等車型。
這讓MAXIEYE的量產數據閉環系統,積累了超兩年前裝部署經驗。有了前期的數據基礎,高速、城市NOA的競爭,本質上將是一場基於BEV的全新的數據競爭。
一是建立BEV架構。
特斯拉、華為、小鵬等幾家頭部公司,已經向行業證明了「BEV+Transformer」是通往自動駕駛終局的解法。高速和城市NOA的競爭,本質上也是基於這條技術路線的追逐。
放下傳統CNN檢測算法執念,基於BEV底層重構,才能解決不斷出現的Corner Case,為端到端自動駕駛的到來打下堅實基礎。
MAXIEYE發佈的青雲架構,是本土智駕公司的一次硬核發聲。
華為、小鵬已經在推送無圖城市NOA,特斯拉FSD預計很快也將在國內開放。車企要麼自建BEV能力,要麼依賴MAXIEYE這樣的公司,才不至於在智駕時代掉隊。
二是獲得大量數據。
高階智駕是一場BEV+Transformer下的數據競爭,這一點從技術邏輯上可以得到證明。
MAXIEYE提出的一個思路是:
「記憶共享=城市NOA」
周聖硯告訴HiEV,「基於深度學習做城市記憶行車,記憶行車的關鍵是建圖成功率,從公司到家,我們可以保證兩次建圖就能完成,不需要行業裏宣傳的一週建圖完畢。時間太長的建圖,消費者的體驗度不高。而且,我們是本地化建圖,自動化的,存儲在域控制器上,不上雲,這樣的話,可以幫車廠解決合規問題。」
所謂記憶共享,將記憶行車作為城市NOA關聯起來,共享車輛記憶下的「圖」。
與基於規則的記憶行車不同,基於BEV的記憶行車,是採用深度學習的思路,效率、穩定性、魯棒性都會更好,不需要像基於規則那樣在後期需要人工去調整算法。
MAXIEYE的記憶行車基於5R6V方案,成本大概幾千元,比主流的高階智駕硬件方案更加便宜。搭載了方案後,哪怕車沒有使用記憶行車,後台的影子系統也實時記憶經過的道路。
「在記憶共享下,如果有1萬輛車在同一個城市,每個人從家到公司的路線都不一樣,高頻使用的話,一個月就能把城市NOA做出來。」周聖硯説,作為供應商,公司搭了技術底座,需要車廠加入進來,一同把採圖這件事做好。
理論上,這與特斯拉、華為、小鵬的思路相似。
行業所談的「無圖」,只是去掉了高精度地圖,並非真正的無圖,城市NOA必須要用到「圖」,只不過這張圖是車企自己構建的,是通過海量車主眾包出來的圖。其「製圖」速度很快,更新頻率也很快,可以達到秒級更新。車廠有了一張自己定義下的圖之後,城市NOA才能大面積落地。
這也是為何,青雲BEV架構可以具備高精度、毫秒級的建圖能力。
周聖硯的計劃是,在做完高速無圖NOA和城市記憶行車後,下一件就會推進端到端研發。現在做的所有事情,BEV、激光雷達、目標識別,目標都是為車前的這根軌跡在服務,所有的深度學習也都是為其服務。
自動駕駛研發的深層邏輯,是正由工程、算法驅動轉為數據、智能驅動,這一點會在接下來表現得愈加清晰,這會淘汰一大批還無法建立真BEV能力體系的玩家。
