衞星推進劑在軌補加技術進展_風聞
剑啸易水寒-深知身在情长在,前尘不共彩云飞。31分钟前
來源:中國航天
衞星推進劑在軌補加技術進展
朱一驍1,2 路子陽1,2 景育1,2 張乾鵬1,2 王申1,2
(1.上海空間推進研究所;2.上海空間發動機工程技術研究中心)
**摘 要:**在軌補加技術利用服務航天器對目標航天器進行推進劑補給,為目標航天器提供了全新的生命力,提升了任務適應能力,拓展了任務範圍,為航天事業發展帶來了新機遇。本文介紹了國內外衞星在軌補加技術的進展,並對衞星補加技術發展趨勢進行了展望。
**關鍵詞:**衞星;推進劑;在軌補加
推進劑在軌補加是指在軌道上利用服務航天器對目標航天器進行推進劑補給的在軌操作,這是空間在軌服務操作技術體系的重要組成部分之一。推進劑在軌補加技術適用於衞星、空間站等多種航天器,本文主要介紹衞星推進劑在軌補加技術。
一、
衞星推進劑在軌補加的方式
衞星推進劑在軌補加主要指通過推進劑的直接傳輸實現補加,主要方式為通過推進劑管路連接直接傳輸進行。隨着技術的發展,在軌補加的方式不斷拓展,出現了通過更換推進劑貯箱實現推進劑補加的方式,以及直接將整個推進系統模塊進行更換的方式。
可實現在軌推進劑補加傳輸的衞星分為服務衞星和目標衞星,在軌補加任務的實施通過服務衞星與目標衞星協同配合來完成。服務衞星主動實施補加服務,一般配置主動補加接口、閥門、電動泵和吹除排放口等,具備主動實施在軌氣密測試、推進劑在軌傳輸、殘餘推進劑吹除等功能,以及測量和計算推進劑補加量的能力。目標衞星被動接受服務,一般配置被動補加接口和管路、閥門等,通過閥門開關等動作配合完成在軌氣密測試、推進劑在軌傳輸、殘餘推進劑吹除等功能。
根據衞星主要推進系統設計方案和補加需求,本文總結出以下3種主要補加模式:
(1)擠壓式補加模式。服務衞星利用與目標衞星推進系統的壓差或電動泵揚程驅動推進劑流動,實現與目標衞星的推進劑傳輸,推進劑進入目標貯箱,貯箱內擠壓氣體壓力逐漸上升。
(2)交換式補加模式。服務衞星與目標衞星貯箱的氣、液路分別連通,利用電動泵揚程驅動推進劑流動,實現與目標衞星的推進劑傳輸,推進劑通過液路連通管路進入目標貯箱;目標貯箱中的擠壓氣體通過氣路連通管路進入服務衞星貯箱。目標衞星與服務衞星相互交換推進劑和貯箱氣體。
(3)降壓式補加模式。目標衞星貯箱通過氣路排氣降低貯箱壓力後,服務衞星再利用與目標衞星推進系統的壓差或電動泵揚程驅動推進劑流動,實現與目標衞星的推進劑傳輸,推進劑進入目標貯箱,貯箱內擠壓氣體壓力逐漸上升。
服務衞星的推進系統包括供氣模塊、燃/氧推進劑貯存和供應模塊、燃/氧推進劑驅動輸送模塊、燃/氧氣液浮動斷接器主動端;目標衞星的推進系統包括燃/氧推進劑貯存和供應模塊、燃/氧接收補加模塊和燃/氧氣液浮動斷接器被動端。圖1為衞星推進系統在軌加註相關組成示意圖。
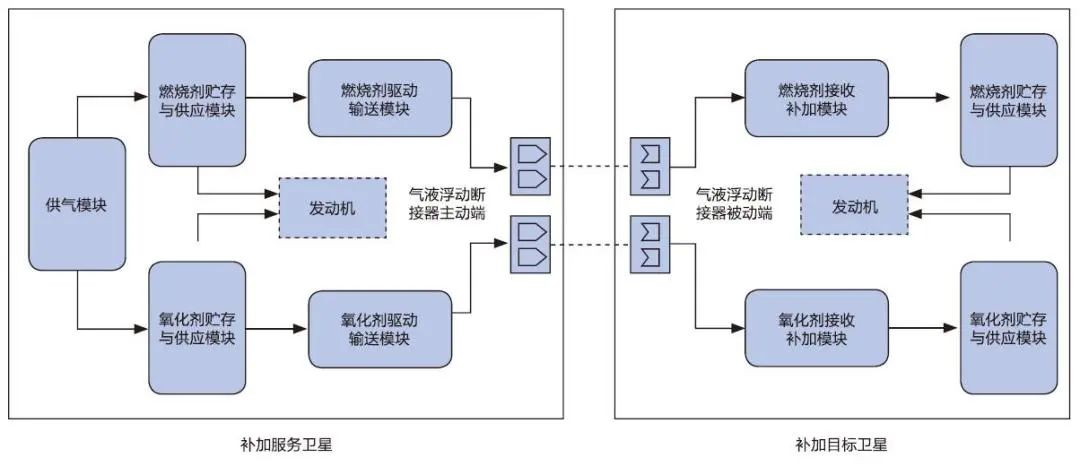
圖1 衞星在軌推進劑補加傳輸系統組成示意圖
二、
國外相關技術發展情況
(一)北美
1984年和1985年,美國先後執行了航天飛機STS任務41-C和51-C,在這兩次任務中完成了可貯存液體管理驗證(SFMD)試驗,如圖2所示。SFMD試驗採用模擬液體進行,貯箱採用透明結構,使參與這次試驗的航天操作人員能用眼睛直接觀察到在微重力下的液體流動現象。長達16h的在軌試驗驗證了微重力下貯箱液體加註和擠出、液體的靜力學和動力學行為。
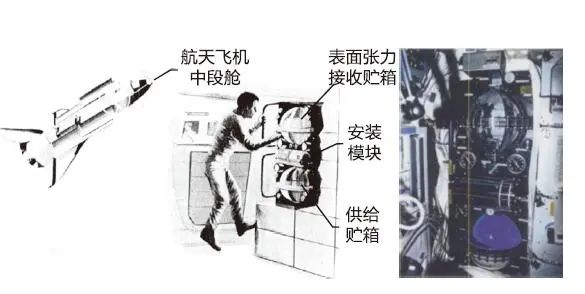
圖2 SFMD試驗示意圖
2007年,美國國防高級研究計劃局(DARPA)實施了“軌道快車”計劃,如圖3所示。“軌道快車”在軌加註演示驗證任務中,“自主空間傳送機器人軌道器”(ASTRO)與“下一代耐用衞星”(NEXTSat)對接,開展了在軌補加試驗,試驗介質為無水肼。試驗中,DARPA利用系統壓差擠壓式補加了15.50kg無水肼,利用系統電動泵驅動交換補加了26.1kg無水肼,驗證了在軌加註技術的可行性。
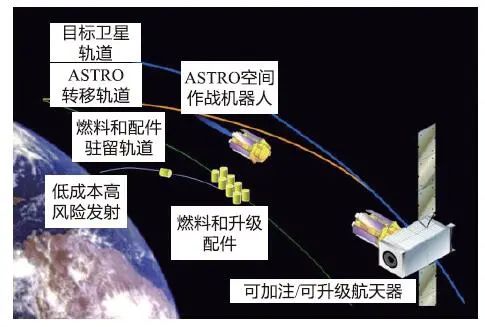
圖3 “軌道快車”計劃示意圖
2014年,美國國家航空航天局(NASA)衞星服務能力辦公室(SSCO)啓動了Restore-L在軌補加試驗項目,如圖4所示,旨在驗證對低軌目標的在軌補加技術。Restore-L可為目標衞星貯存並提供燃料,其特有系統是燃料運輸系統,能夠對目標衞星進行長時間、多任務的燃料補給,該系統由燃料貯箱、電動泵、流量計、燃料運輸管道等組成,其中電動泵能夠在高壓下傳送燃料,流量計能夠保證燃料補加系統定量、準確地傳輸燃料。

圖4 Restore-L在軌補加示意圖
從2009年開始,NASA與加拿大航天局實施機器人燃料加註任務(RRM),如圖5所示。RRM所有的空間操作均由地面控制,由“國際空間站”上21.34m長的機械臂(Dextre和Canadarm-2組合體)操作,利用RRM模塊模擬非合作目標(無被補加衞星)。RRM是“國際空間站”機械臂首次用於空間技術驗證,通過旋擰、剪切、夾持、剝離、插拔等操作為燃料加註、故障維修、在軌組裝等獨立飛行任務打下了良好的基礎。
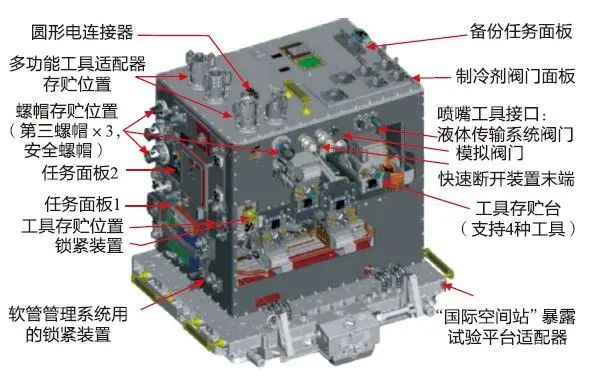
圖5 RRM模塊
RRM分為3個階段:RRM1主要驗證燃料加註的相關操作工具性能和技術,參與RRM1的包括Dextre機械臂、RRM模塊、4個末端工具及適配器;RRM2主要驗證在軌監測、修復故障及製冷劑補加等在軌服務所需的技術、工具和工藝;NASA規劃的第三階段任務圍繞未來載人深空探測等任務對製冷劑補充和電推進使用的氙氣補給需求展開,屆時將使用新模塊開展驗證。
加拿大麥德(MDA)公司提出了利用機械臂對壽命末期的地球靜止軌道(GEO)衞星進行燃料加註的GEO延壽系統方案設想,如圖6所示。該系統利用機械臂捕獲目標的遠地點發動機噴管形成剛性組合體,然後再打開目標衞星的加排閥門,插入軟管補加適量燃料。

圖6 GEO延壽系統示意圖
(二)歐洲
1989年,歐空局(ESA)提出了“地球靜止軌道服務飛行器”(GSV),對GEO衞星進行燃料加註等在軌服務。但GSV僅停留在概念階段,如圖7所示。
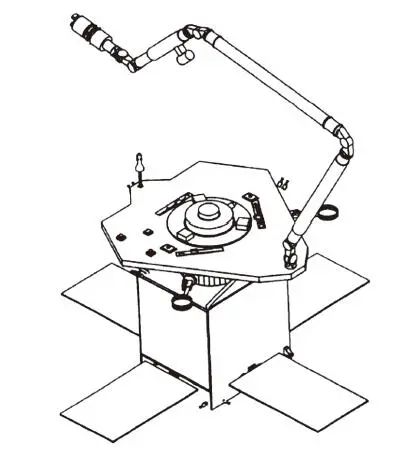
圖7 GSV概念設計圖
後來,ESA圍繞空間站補加應用進行研製的“自動轉移飛行器”(ATV)是用“阿里安”5E火箭發射的貨運飛船,主要任務是為“國際空間站”服務。2008年3月9日,ATV發射升空,並於4月初與“國際空間站”實現對接;6月17日,ATV為“國際空間站”一次性補加了約810kg推進劑,包括280kg的偏二甲肼和530kg四氧化二氮,整個補加過程持續大約0.5h。同年8月,ATV幫助提升空間站的運行軌道;9月,ATV攜帶空間站上的垃圾脱離空間站。ATV的對接和補加系統全部由俄羅斯來承擔,採用的技術仍然是增壓氣體回用技術。俄方提供的補加模塊與“進步”貨運飛船的補加模塊類似,與衞星基於表面張力貯箱的補加技術差異較大。
ESA、德國航空航天中心(DLR)和宇宙公司(Kosmas)還合作開展了“赫爾墨斯”(Hermes)計劃,研究“國際空間站”在軌收集和加註技術。Hermes計劃對失效衞星、常規衞星及火箭上面級進行收集,對GEO通信衞星進行在軌補加。Hermes計劃目前還處在方案階段,如圖8所示。
圖8 Hermes在軌加註概念圖
(三)日本
日本也在積極開展與在軌補加技術相關的研究,並且在一些相關領域,尤其是空間機器人和對接裝置研究方面取得了較大進展。
從20世紀末開始,日本參與了一系列前沿性空間活動,例如,參與“國際空間站”的活動——研製“日本實驗艙”(JEM)、可重複使用的“希望”貨運飛船和先進空間平台等飛行器。這些空間活動都需要交會對接和在軌操作服務技術及應用空間機器人支持執行各種飛行任務。此外,1997年日本發射了“工程試驗衞星”7(ETS-7)進行空間試驗。該衞星用於驗證空間機器人和空間交會對接技術,完成了世界上首次在太空中通過空間機器人抓取自由活動的在軌衞星的試驗。
ETS-7衞星的空間操作過程為:衞星被H-2火箭發射到380km工作軌道,變軌後上升到550km高度的圓軌道,然後釋放目標星,在此基礎上開始進行交會對接飛行試驗。進行交會對接試驗時,追逐星按要求環繞目標星一圈(總長度達8km)。最終的接近過程將在目標星前方約114m處開始進行,一部接近雷達將目標星引導到約2.44m距離之內,然後改由一台逼近傳感器引導對接。地面控制人員利用追逐星的遙控機械臂進行一系列捕捉試驗,該機械臂長2m,質量為140kg,有6個自由度,其控制操作通過追逐星上的計算機來進行。地控人員還利用一台從追逐星上取出的在軌可替換單元(ORU)進行遙控設備更換試驗。ORU用於進行模擬燃料再補加、部件與設備更換或檢查等操作。此次試驗的目的之一是控制追逐星和機械臂的姿態,保證衞星相對於機械臂運動的穩定性。試驗中涉及的重要技術還包括軌道上機械臂的延時遙控操作、在軌衞星維護操作(如目視檢查)和軌道替換裝置及軟燃料囊的處置等。
ETS-7衞星成功演示了燃料貯箱ORU模塊的在軌更換,充分驗證了通過推進模塊更換進行在軌補加的可行性。ORU模塊大小類似一個微波爐,包括一個液體推進劑貯箱、閥門、液體連接器和電連接器,貯箱通過一個液體傳輸連接器與目標星的其他貯箱連接,實現推進劑的補加。該試驗成功拓展了通過推進劑進行直接傳輸加註的傳統在軌補加概念,為在軌補加的實現增加了新的途徑。
三、
我國技術發展情況
我國在軌補加技術方面的主要研究單位包括上海空間推進研究所、北京控制工程研究所和國防科技大學等科研單位和高校。通過近20年的研究積累,我國在相關基礎理論及單項關鍵技術研究方面取得了較大進展,突破了可補加表面張力貯箱、補加對接機構、電動泵、流路控制閥組、超聲波流量計、貯箱剩餘量測量系統等關鍵技術,完成了關鍵部件的地面樣機研製,建立了在軌加註地面集成技術驗證系統並開展了全系統試驗驗證,部分性能指標已達到國際先進水平。
(一)上海空間推進研究所
上海空間推進研究所在國內首次研製併成功完成了空間站在軌補加任務。基於空間站在軌補加技術研製經驗和衞星推進系統研製經驗,該所開展了基於衞星推進系統的推進劑在軌補加技術研究和關鍵技術攻關。
2013年,上海空間推進研究所聯合上海宇航系統工程研究所開展了衞星推進劑在軌補加方案的流體動力學仿真和地面試驗研究。由於地面狀態無法模擬持續的微重力環境,因此補加過程貯箱內的微重力流動特性主要通過流體仿真進行研究,圖9所示為板式表面張力貯箱結構及微重力環境加註過程流體仿真分析。
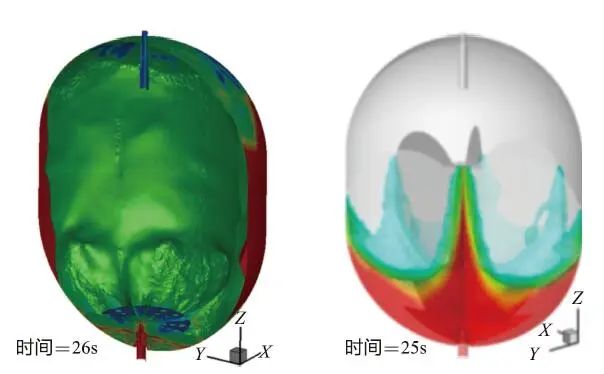
圖9 板式表面張力貯箱結構及加註過程分析
2014年,該所開展了補加原理地面系統試驗,着重對補加原理的可行性、補加流程控制及故障處理方法等進行研究和驗證工作,進行了20多次氣體擠壓和電動循環泵驅動兩種方案的補加試驗,圖10為補加系統地面試驗裝置。

圖10 地面補加試驗裝置
2015年,該所開展了在軌加註系統方案研究、論證和設計工作,完成空間服務飛行器、空間燃料站、可接收服務衞星系統的可維護方案論證工作,形成初步在軌加註服務體系的系統方案(見圖11),梳理出一系列系統和單機關鍵技術。
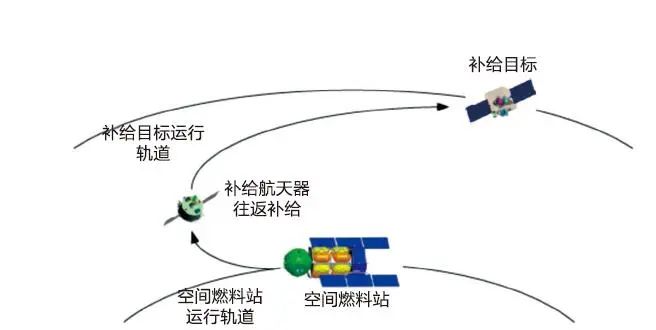
圖11 在軌加註服務體系
該所開展了氣體激勵法的剩餘量測量技術研究,用外部高壓氣體通過連接閥門管路向貯箱注入一定質量的氣體,在貯箱內產生壓力增加的激勵效果。用温度傳感器測量激勵產生的貯箱温度變化,用壓力傳感器測量激勵產生的氣體壓力變化,計算液體推進劑的體積量。氣體激勵法的剩餘量測量技術已完成了地面考核試驗,並在高軌衞星型號上成功應用。
從空間站在軌補加技術工程研製開始,該所便開展了管路對接用浮動斷接器研製工作,先後成功研製單路、雙路、四路浮動斷接器樣機,如圖12所示。形成了補給管路對接裝置型譜產品,其中單路浮動斷接器已應用於“天舟”一號和“天宮”二號飛行試驗。

圖12 浮動斷接器系列
2023年,該所聯合上海宇航系統工程研究所和北京控制工程研究所完成了衞星在軌補加推進劑傳輸流程技術規範,為未來衞星在軌補加體系建設奠定了基礎。目前正在研製的多顆衞星均具有補加或被補加功能。
(二)國防科技大學
國防科技大學基於側音測相和實時多場耦合測量方法完成高精度超聲波流量計樣機研製(見圖13),測量誤差小於0.6%FS,並在“天源”一號試驗衞星上完成飛行試驗驗證。同時,還採用體積激勵原理開展推進劑補加量測量技術研究,完成體積激勵測量裝置樣機研製(見圖14),測量誤差小於0.6%FS,並完成了飛行試驗驗證。

圖13 超聲波流量計

圖14 體積激勵剩餘量測量裝置
國防科技大學與北京控制工程研究所聯合完成了“在軌加註關鍵技術驗證搭載實驗”載荷研製工作(見圖15),試驗系統搭載了2~5L板式表面張力貯箱和試驗測量系統等設備,於2016年6月搭乘“長征”七號運載火箭發射入軌。試驗系統首次在軌開展了基於表面張力貯箱的去離子水傳輸試驗,以及多孔介質氣液分離實驗、多孔介質推進劑管理實驗、兩相管道流動行為觀測實驗、不對稱內角彎曲流道實驗、降壓沸騰實驗與傳熱沸騰實驗等多項探索研究。

圖15 在軌加註關鍵技術驗證搭載實驗載荷
(三)北京控制工程研究所
從20世紀90年代開始,北京控制工程研究所開展推進劑在軌補加技術研究,在863項目支持下開展了降壓式和交換式在軌補加技術研究。針對航天器在軌補加的關鍵技術開展了一系列研究工作,並完成了補加對接機構等關鍵單機產品的研製,目前已完成原理樣機的研製工作,搭建了補加過程地面演示驗證系統,開展了相關地面試驗驗證工作。
四、
衞星推進劑在軌補加技術發展趨勢
隨着航天技術的不斷進步,補加技術也在迅速發展。根據當前的技術進展情況預測未來補加技術的主要發展趨勢體現在以下幾個方面。
(一)高可靠的補加產品
隨着電動泵、流量計、補加對接機構等主要關鍵技術的突破,補加技術的在軌試驗試用即將開展,但補加技術的在軌大量應用還需要以高可靠的關鍵產品作為支撐。補加技術應用的一項重要需求就是重複使用,只有提高補加關鍵產品的可靠性,補加技術的經濟性才能得到充分發揮。
(二)補加技術的標準化
補加技術在軌應用涉及服務衞星和目標衞星之間的補加接口、系統配置、參數和補加流程等多方面的匹配性,服務衞星甚至需要匹配多種目標衞星,衞星之間的協同關係至關重要。從在軌補加體系建設頂層考慮,實現補加技術的標準化勢在必行。目前,各相關單位正在逐步開展補加接口、補加流程的標準化工作,未來結合在軌試驗情況和應用需求,可進行補加技術的必要拓展和規範化,形成補加技術規範,為補加技術應用生態建設奠定基礎。
(三)瞄準未來需求的補加技術發展
現階段,衞星推進劑在軌補加技術主要開展了液體推進劑和低壓氣體的補加研究,這是大多數在軌衞星的補加需求,補加技術還需要瞄準未來技術的發展方向和應用需求。例如,補加服務衞星的在軌重複使用對高壓氦氣補加的需求,電推進系統對氙氣、氪氣等工作介質的補加需求,深空探測等任務的低温推進劑補加需求,熱控系統對冷卻工質的補加需求等。針對這些可能的需求,提前開展高性能氦氣壓氣機技術、熱壓縮技術等關鍵技術攻關。
(四)補加技術的自主化、智能化發展
隨着衞星在軌補加應用體系建設,補加任務數量逐漸增加,補加任務的執行大量依靠地面遙控完成,這將成為限制應用發展的瓶頸。因此,補加技術應逐步向自主化、智能化方向發展,以任務可靠執行為基礎,逐步增加流程控制、參數判讀等環節自主性,改進優化故障自主檢測機制,提升故障應急處理能力,不斷提高補加任務的自主化、智能化水平。
五、
結束語
在軌補加技術為衞星提供了全新的生命力,不僅極大提升了衞星任務適應能力,拓展了任務範圍,而且為衞星總體設計提供了全新思路,為航天事業發展帶來了新機遇。各國的技術進展表明這一技術具有無限潛力和可能性。為了保護寶貴的太空環境,需要進一步加強技術研發,鼓勵國際間的合作,共同促進在軌補加技術的發展和廣泛應用。(本文原刊載於《中國航天》2023年第11期)