全球首次!國產純電驅機器人打破波士頓動力空翻“專利”_風聞
量子位-量子位官方账号-44分钟前
豐色 魚羊 發自 凹非寺
量子位 | 公眾號 QbitAI
機器人空翻,這回可不是波士頓動力的專利了。
這麼一段機器人翻跟斗視頻,在週末火遍國內外。
姿勢夠帥,落地超穩,末了還能優雅起身:
最關鍵的是,這還是一款電驅動的人形機器人——
性價比更高,但相比于波士頓動力的液壓驅動路線,可能會運動能力稍顯不足。所以一個空翻跳之後,舉重若輕顯出技術水平和實力。
也難怪網友看罷直呼:
這是波士頓動力的挑戰者出現了?

以及更重要的是發佈這款電驅動人形機器人的,還是一家名不見經傳的公司、無名之輩——
一家名為MagicLab的公司。
之前沒有見諸過報端,信息堪稱寥寥又寥寥。在微博和𝕏上,MagicLab都只留下了兩條最新視頻,再無更多信息透露。
所以一家神秘公司,放出一段視頻,就想挑戰波士頓動力?

不過嘛,量子位一番挖掘之後發現,MagicLab確實是“無名之輩”,但也並非石頭裏蹦出來,它背後不僅還有一家相關公司,而且還是一家中國公司,甚至不少人可能還有他們家的掃地機器人產品。
嗯,夠magic吧?
首個電驅動空翻機器人
還是先來看看這個人形機器人本體。
儘管具體參數信息沒有公佈,但演示視頻還是給我們透露一些細節。
例如驅動器:
一個型號為L28,能以張力750N、轉速120mm/s以及0.02mm的定位精度拉動兩塊分別重25kg(共計100斤)的鐵塊上升。
一個為D190,其額定輸出轉矩為150Nm(牛米),但最大可達525Nm,直接可以拉動3位成年男性。

至於具體如何完成空翻這一高難操作,就涉及動態建模、運動規劃、實時控制系統等多個技術領域了。
儘管大夥覺得它和波士頓動力的Atlas很像,但兩者其實走的是完全不同的驅動路線。
如大夥所知,機器人驅動方式一般有三種:
液壓驅動、電驅動以及氣動驅動。
第一種液壓驅動已經很成熟,波士頓動力採用的正是這種。
這類機器人最大的優點就是運動能力強,只需要較小的驅動力或扭矩就可獲得很大的動力,且能非常方便地進行各種方向、速度、載荷控制。
不過缺點就是貴,因為它的能效比較低、製造精度要求高、維修麻煩等等。
和特斯拉的人形機器人擎天柱、小米CyberOne一樣,MagicLab的空翻機器人採用電驅動方案。
這種方式優點顯而易見,結構簡單、驅動效率高、成本低(這也是想要實現量產目標的特斯拉為什麼選這種方式)。
但大夥也看到了,目前這類機器人的運動能力其實比較弱,如前幾天特斯拉的機器人最新學會的技能還是疊衣服,再往前則是做瑜伽。
像這種高難度、對運動性要求很高的空翻動作,MagicLab是第一個實現的。

前空翻之外,MagicLab最新發布的成果視頻中,還展示了一位“成型”的人形機器人如何做咖啡拉花。
手法也是相當講究了。

綜合公開的信息來看,MagicLab是一家相當年輕的公司,但怎麼那麼眼熟呢?
扒一扒MagicLab?
原本呢,我們是想找AI幫忙,把MagicLab在互聯網上的蛛絲馬跡連起來。
但後來,眼尖的人類編輯更早發現——這個MagicLab這個人形機器人,跟之前某場中國掃地機器人公司發佈會櫥窗裏的展示,很像很像……
再來看一眼全身照:

就在2023世界機器人大會上,該人形機器人也展示過MagicLab同款咖啡拉花手藝:

是的,不能説很像,簡直是一模一樣。
所以這個外形都有這麼複製抄襲的?
我們又找到了MagicLab的B站主頁。
代表作裏提到了這個“Eame”機器狗,也是那家掃地機器人公司的仿生四足機器狗產品。

最後,高手都在評論區,有網友爆料了:

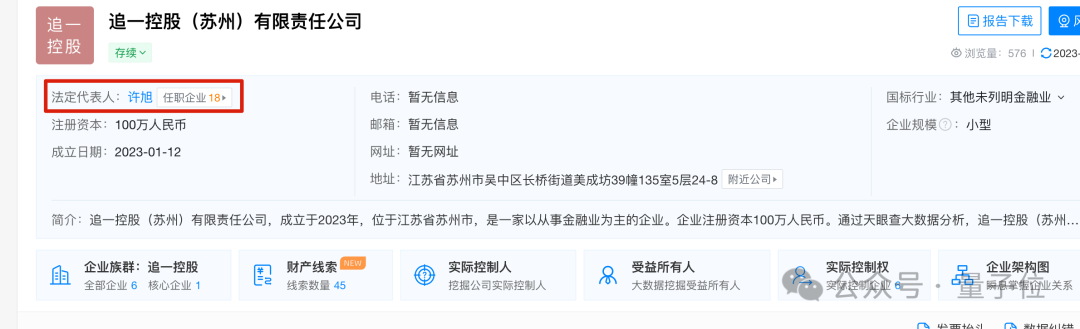
我們進一步搜索了公眾號MagicLab Official的認證主體“魔法原子機器人科技(北京)有限公司”,發現了一些蛛絲馬跡。
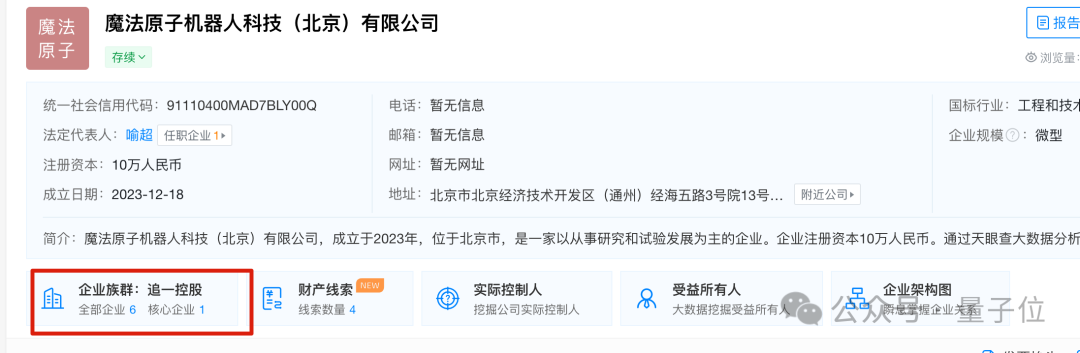

消息人士向我們透露,MagicLab成立於2024年,是一家專注於機器人技術和人工智能的全球化機器人品牌。
另外,MagicLab團隊現在已達到百人規模,成員來自全球,其中80%以上為研發人員。
以及可以明確的是,2024年裏,想給具身智能機器人添柴加火的玩家,越來越多了。
2023年屬於GPT,2024年還看機器人?
參考鏈接:
[1]https://twitter.com/MagicLab244144
[2]https://weibo.com/6083680910/