理想L9高速追尾後,智能駕駛想要車、路、雲“合體”_風聞
松果财经-14分钟前
最近,持續佔據熱門的理想L9高速追尾事件,似乎正在放慢“智能駕駛”的進度條。該事件中,搭載L2級輔助駕駛功能的理想L9誤判廣告牌上的小貨車圖片,突然急剎造成了追尾。事件發生後,理想汽車回覆稱,事故原因確實是系統誤識別所致。
這一事件的發生,有如“當頭棒喝”,一度驚醒各大車企。線上,車友們對“智能駕駛”的質疑情緒也逐漸沸騰。焦灼之下,智能駕駛的未來之路,何去何從?
智能駕駛的AB面
4月“大熱門”的北京車展上,智能駕駛是無可替代的焦點之一。展出的自動識別紅燈、障礙物到自動泊車、AI代駕等智能應用、功能及產品,無疑都在改變人們的出行方式和生活方式。
正如早期的特斯拉,其之所以能夠快速打開市場,除了產品本身外,另一個關鍵因素就是智能駕駛。特斯拉通過自研芯片+算法+車載操作系統構建出行生態閉環,其自研FSD芯片算力高達72TOPS,計算平台HW3.0算力也達到144 TOPS,均是量產車型中的第一梯隊。
不僅如此,智能駕駛在消費者決策中的重要性也在提高,滲透率攀升趨勢明顯。佐思汽研數據顯示,2023年,新能源乘用車總體銷量為728.65萬輛,其中368.42萬輛標配了L2級輔助駕駛功能,L2標配的滲透率也隨之從2022年的43左右提升至2023年的50.56%。
面對這一趨勢,試圖瓜分更多市場份額的新勢力、傳統車企,以及隨後進場的華為、小米,無一例外都在加碼智能駕駛。人無我有,人有我優,市場參與者之間決勝的邏輯,就是這麼簡單明瞭。
深入來看,智能駕駛最根本的意義在於提高人們出行的安全性和便捷性。但不得不説,理想L9高速追尾事件給消費者以及車企們敲響了警鐘。
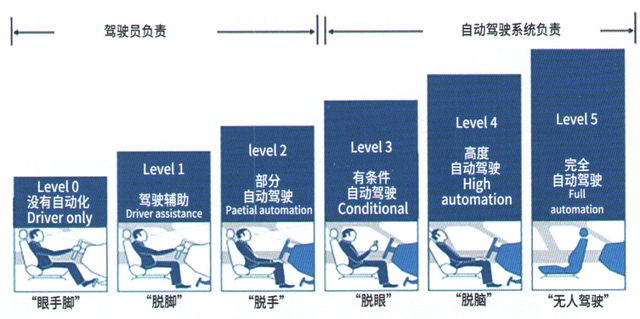
儘管,《汽車駕駛自動化分級》國家推薦標準顯示,理性L9搭載的L2級駕駛自動化等級屬於組合駕駛輔助,目標和事件探測與響應主體仍為駕駛員和系統。但在無明顯障礙物的前提下,車輛緊急制動功能突然啓動,已經明顯屬於“幽靈剎車”範疇。
汽車行業分析師劉昊表示,幽靈剎車與車輛感知系統有關。傳感器中,毫米波雷達不擅長識別靜態物體,攝像頭受外部環境的影響較大。因此,毫米波雷達進行物體識別時確實會存在誤判的情況。
可見,智能駕駛在重視安全的同時也“忽視”了安全,它沒有想象中的那麼“簡單”。
然而,目前的國內市場,雷達已經被廣泛運用。蔚來、小鵬、理想等都在嘗試“全副武裝”,車頂、大燈附近、車頭、車尾等多處都進行了配置。對此,相關行業專家認為,感知硬件過多有利有弊,識別獲取的大量信息也可能對決策系統作出干擾,導致系統作出錯誤指令。

中信證券研報數據顯示,激光雷達的單顆成本介於600至2000美元之間,而整套自動駕駛系統普遍需要3至5個激光雷達,因此總成本也在3000至10000美元之間波動,價格不菲。
這樣一來,新能源汽車在搭載智能駕駛的情況下,甚至會同時丟失安全性和性價比。在深陷“信任危機”的路上越走越遠,智能駕駛還能繼續向前嗎?
智能駕駛如何走向“完全體”?
在“降本增效”、價格內卷的大背景下,乘聯會數據顯示,2023年乘用車智能駕駛滲透率與價格呈現反向增長。此時,華為、特斯拉擅用的純視覺智駕方案,因為成本優勢開始受到不少車企追捧。
中信證券在研報中指出,純視覺方案最大的優點在於其整體成本,經合計,特斯拉8個攝像頭的硬件總成本僅為200美元左右,而一套激光雷達的成本則介於3000至10000美元不等。
這裏,似乎又出現了“魚”和“熊掌”不可兼得的問題。
從實際應用層面來看,其安全性依舊存疑。以使用純視覺方案的特斯拉為例,其L2級駕駛事故頻次並不低。
美國國家公路交通安全管理局發佈的L2級自動駕駛事故數據報告顯示,2021年7月1日至2022年5月15日的10個月內,有392起事故與L2級ADS輔助駕駛系統有關,而這其中70%的事故又與特斯拉相關,概率已然不低。
中信證券在研報中也提到,純視覺方案具備成本優勢,但卻更為依賴算法和算力的支撐。這因為,視覺感知到信息量遠大於激光雷達捕捉到的信息量。而公認好開的特斯拉正是基於算力為 144 TOPS的FSD Computer,並不斷對其算法進行迭代得來的成果。
為了滿足新能源汽車搭載“高強度”智駕的需求,算力供應鏈端仍在追求極致的高算力,英偉達發佈的最新一代智駕計算平台Thor,算力已經高達2000 TOPS。儘管如此,但行駛車輛的盲區與超視距感知依舊是單台車輛無法突破的壁障。
從長遠來看,想要構建智能駕駛系統的終極形態,僅依靠車輛自身的信息獲取與運算能力是不夠的。
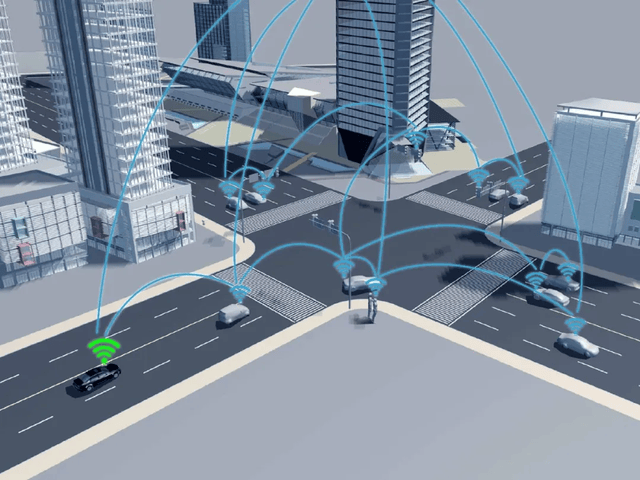
但如果將汽車本身的算力“負擔”向外遷移,轉移給雲計算服務商,將路面數據採集和分析交給交通基礎設施建設者,使車企從“多線任務”轉換為“單線任務”,“車、路、雲”各板塊“各司其職”形成合力。
這樣一來,首先是安全性可以得到提升,車輛在行駛過程中,能夠實時接收到道路狀況的更新,包括潛在危險、事故信息等,可以提前採取預防措施;其次,通過雲端的數據分析,車輛可以更為高效的確定最佳路線,大大優化出行效率;再者,智能路線規劃和駕駛建議有助於減少不必要的加速和制動,從而降低燃油消耗和減少排放。
成本層面,據中國工程院院士、清華大學車輛與運載學院教授李克強分析,實際上公路基礎設施建設的成本遠大於信息基礎設施本身。從自動駕駛考慮,行駛在信息化道路上進行自動駕駛,遠比單車上的成本更低。從整個車路雲的大系統看,網聯式自動駕駛成本沒有增加,甚至某種程度上成本更低。
正如“眾人拾柴火焰高”,這不僅能夠幫助車企提效,同時還能“減壓”。
宏觀來看,車路雲一體化技術路線已經步入上行空間。中國汽車工程學會研究顯示,據預測,2025年、2030年車路雲一體化智能網聯汽車產業產值增量為7295億元、25825億元,增長勢頭強勁。
未來,智能網聯汽車同其他產業經濟的融合發展,將成為汽車產業轉型中新的戰略制高點。
結語
站在汽車產業的角度,想要實現智能駕駛,無論是採取“自我孵化”的方式,還是“尋求外援”的方案,終歸都是在選擇通往終點的路。
大勢所趨之下,“不可為”和“必可為”也成為了時代的過濾器,誰會掉隊,誰會崛起,這個飛速發展的時代會給出客觀的判斷。
作者:琴聲奏響時
來源:松果財經