太丟人!台灣退役少將説:解放軍到台北會迷路,因為沒有谷歌衞星導航?_風聞
军武次位面-军武次位面官方账号-专注于高品质的趣味军事科普,打造男人最爱看的频道06-10 07:30

最近,台灣知名“電子寵物”於北辰又在一檔台媒節目中胡説八道了,他竟然説:解放軍在進入台灣後一定會迷路,而理由就是到那時候Google肯定被屏蔽掉了,Siri也一樣被禁,那沒了這兩樣,解放軍怎麼可能找對路?
▲台海網報道
節目中的主持人也是對於北辰的荒謬言論極力配合,還説她自己到了新北都會迷路,看得軍武菌簡直是一臉的問號,可能他是把Google的導航服務當成GPS衞星導航的唯一途徑了吧?

且不説Google在大陸都被限制服務多少年了,這Siri的導航服務除了有蘋果手機的人用,還能有幾個人在用,就説這GPS衞星導航真沒了,咱們這仗就沒法打了嗎?

我們知道,行軍打仗最先解決的就是從哪兒來到哪兒去的問題,這就是導航,就跟一個笑話描述的那樣,一個人帶着指南針卻迷路,因為他只知道北在哪兒,可不知道他在哪兒。

所以説,要想完成導航,必須要知道起始點位置,還有正確的方向,如果有目的地的話,還得知道目的地在哪兒,只有這樣才能告訴用户通往目的地的路徑。

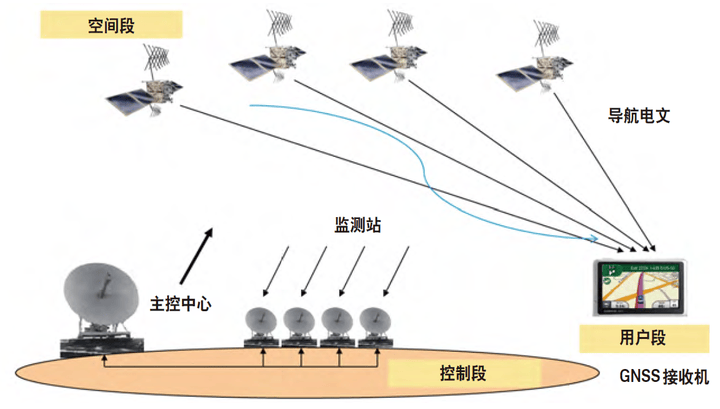
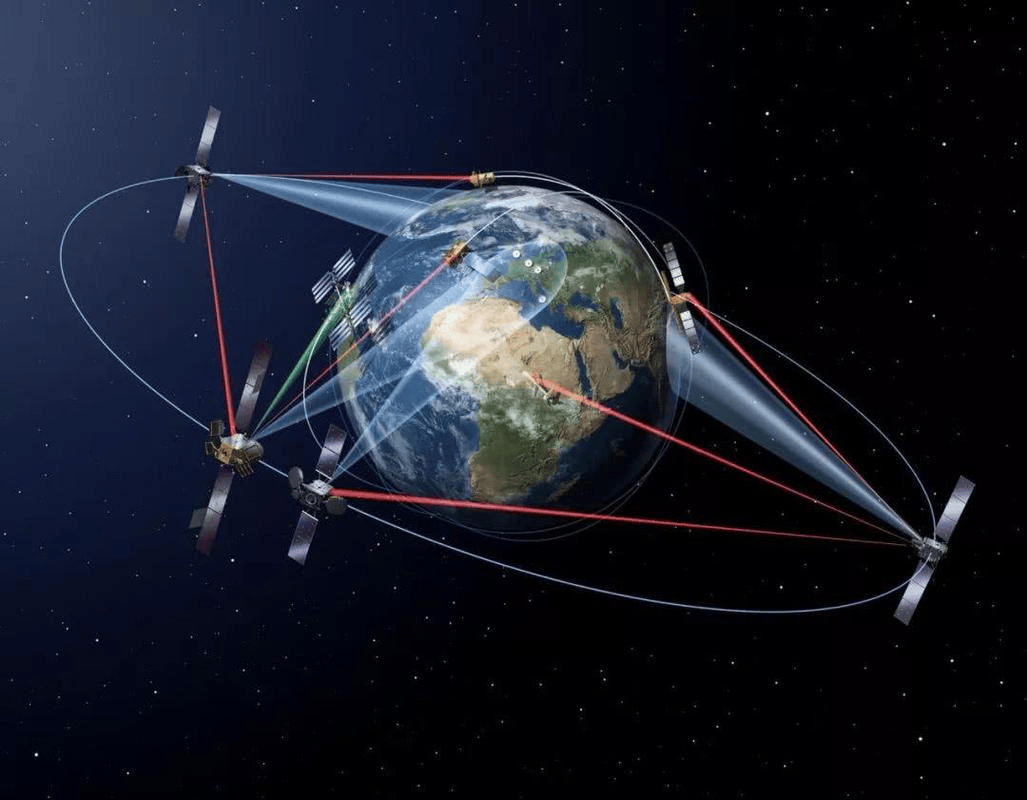
我們常説的衞星導航,用專業術語講就是全球衞星導航系統(Global Navigation Satellite Systems,GNSS),是指使用衞星信號來確定用户接收機位置的系統。
GNSS分為空間段、控制段和用户段三部分構成,其中,空間段是衞星或航天器,控制段是地面監測站和主控中心,用户段是GNSS接收機。
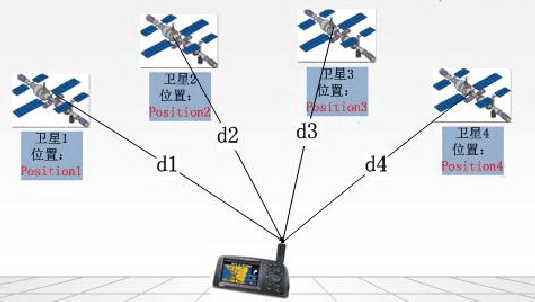
由於GNSS接收機使用導航電文中的傳輸時間和位置數據,測量衞星信號的時延,能由此計算接收機與衞星的距離,而距離某顆衞星特定距離的 GNSS接收機所有的可能位置就會構成了一個球面,當三個球面交會時就會得到兩點,而地球表面上的接收機位置就可以作為第四個數據精確定位,這也就是最基礎的三邊測量法。
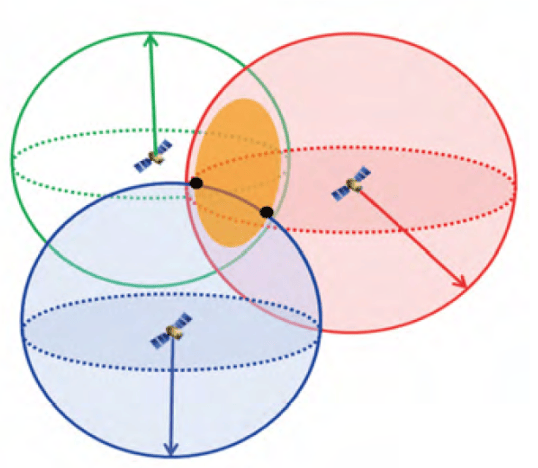
也就是説,要想將進行衞星導航,那至少要有三顆衞星在天上才行,如果有四顆衞星的話,則不僅可以確定接收機的經緯度和高度,還可以校正接收機的時鐘誤差,確定正確時間。
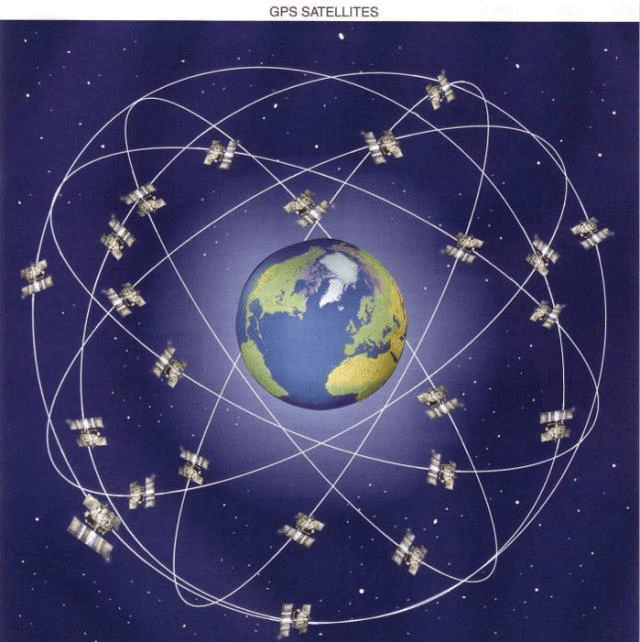
目前GNSS中,美國的GPS系統、中國的北斗系統和俄羅斯的 GLONASS系統處於完全運行狀態,可以提供全球定位服務,歐盟的“伽利略”系統的可靠性一直很成問題。
在上述四種全球導航系統中,GPS系統由24顆工作衞星和4顆備用衞星組成,覆蓋全球99%的地區,定位精度達到了0.1米的水平,是全球範圍內精度最高、覆蓋範圍最廣的導航定位系統。
北斗系統於2012年正式公佈,由35顆工作衞星組成,覆蓋全球100%的地區,儘管我國對外宣稱北斗的定位精度是10米的水平,但實際測試過程中,通常情況下是2-3米,其中有一個頻點的信號,在全世界定位精度最好可以達到1點幾米。
而且這個公佈出來的精度可能是平均值,在國內的區域測試中,應該更加精確,像70週年閲兵的時候,北斗系統就保障了受閲時各方隊整體車速控制在10千米/小時,騎線偏差不超過1釐米。

在現代戰爭中,美國確實可以對一定區域的GPS進行了強幹擾,或者加大民碼誤差,極端情況下會關閉民碼的服務,這樣就能使這個地區的導航服務被“切斷”。
但問題是,這麼幹的話是不可能分敵我方的,要干擾的話那就所有GPS服務都被“切斷”,解放軍要用不了,台軍一樣用不了,可是解放軍還有備用的北斗導航衞星啊。
要麼台軍使用干擾設備,大面積干擾和阻斷作戰區域內所有的衞星導航信號,甭管是GPS、GLONASS還是北斗,統統屏蔽掉,這就可以防止安裝了衞星導航制導模塊的精確制導武器直接命中本方目標。
但問題是,咱們的武器又不是隻有衞星導航這一種導航方式。

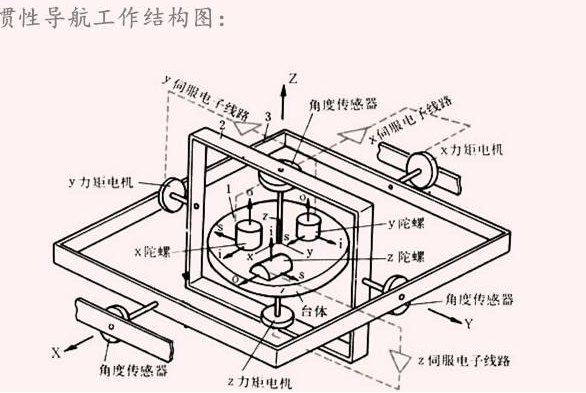
導彈上用的景象匹配咱們暫且不論,我軍的武器裝備中還有一種導航方式被廣泛應用,那就是慣性導航。

前面我們講過,導航要解決的問題就是從哪裏來,到哪裏去的問題,而要使用慣性導航就需要先知道自己的初始位置和初始朝向(姿態),還要知道自己每一時刻朝向改變量和相對朝向,然後在單位時間內進行累積計算,最終得出現在的朝向和位置。
那麼要想知道自己的方向和位置是如何改變的,就要依靠慣性器件了,通常是加速度計和陀螺儀,其中,加速度計利用 a=F/M原理來測量“慣性力”,陀螺儀負責測量角速度。
陀螺儀測量角速度的過程是比較有意思的。我們知道,當一個高速旋轉的陀螺立在平面上時,如果推一下它的上面,那麼它會立刻向受力的方向徑直移動,這就是陀螺的進動性。
而在手指推力的作用下,高速旋轉的陀螺又會在傾斜後,迅速重新恢復之前的直立姿態,這體現的是陀螺的定軸性。
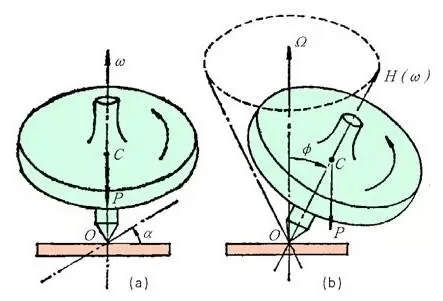
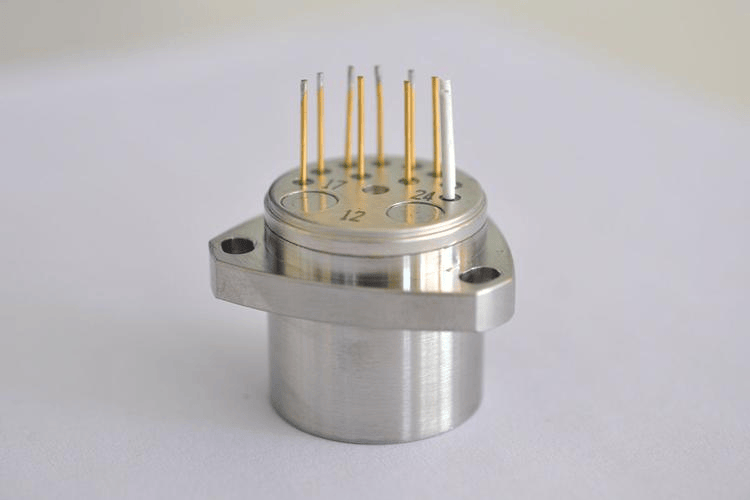
這兩個特性就是陀螺儀測量角速度的基礎。就拿飛機、導彈等系統上常用的動力調諧撓性陀螺儀來説吧。
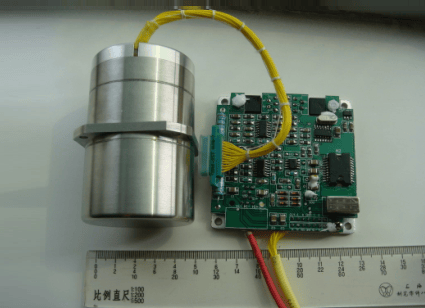
它由內撓性杆、外撓性杆、平衡環、轉子、驅動軸和電機等組成。它的陀螺轉子為外緣向下延伸成環形凹槽的圓盤,裝在彈性支承裝置上。撓性接頭也就是一個具有彈性的軸,一般採用整體式動力調諧式撓性接頭。
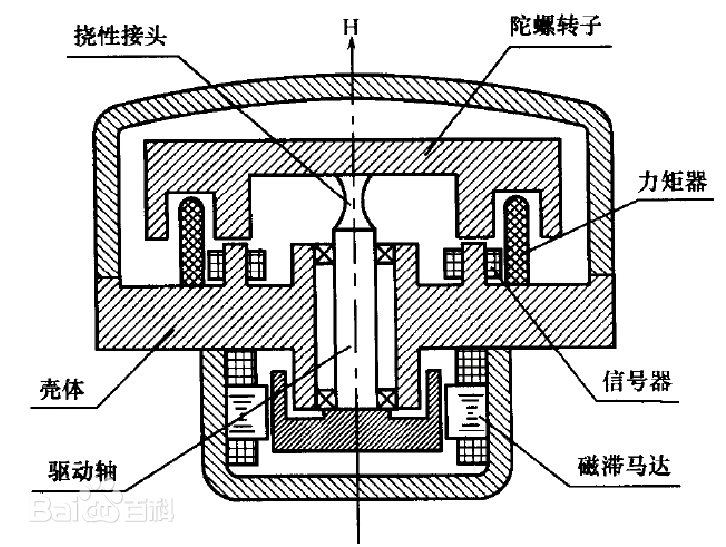
驅動電機是一個磁滯馬達,其轉軸便是轉子的自轉軸;信號器由對稱安裝、反向串聯的兩個線圈及有關磁路組成;力矩器用來沿兩進動軸對轉子施加修正力矩或補償力矩。
由於平衡環扭擺運動時產生的動力反作用力矩(陀螺力矩),可以平衡撓性杆支承產生的彈性力矩,所以當它正常工作時,驅動電機高速旋轉,通過內撓性軸帶動平衡環轉動,平衡環再通過外撓性軸帶動陀螺轉子旋轉,轉子此時就會成為一個無拘無束的自由轉子。
在不受外力干擾的情況下,撓性陀螺儀的自轉軸與驅動軸在同一條軸線上,但一旦物體的姿態發生改變,也就是陀螺儀在受到外力干擾或殼體轉動時,自轉軸和驅動軸便不在同一軸線上,此時傳感器就會感知偏移量,從而計算出角速度。
這個聽起來比較複雜,其實原理很簡單,説白了就是當承載高速旋轉陀螺的平台發生姿態變化時,陀螺會發生偏移,測量這個偏移量就知道平台的角速度變化了。

至於初始位置和方向,咱們不是有地圖嘛,再不濟總能查到現地位置嘛,直接輸入座標就可以了,而且陀螺儀本身也能尋北,這下初始位置和方向都有了,剩下的就是如何進行計算修正了。
而且這個慣性導航儀還有一點好,就是衞星導航無法即時發現終端的速度和方向變化的,得等跑了一段距離之後才能測出,而陀螺儀則能夠在方向和速度改變的瞬間即時測出,從而能讓導航軟件及時的修改導航路線。

這撓性陀螺儀這也不是啥新鮮事物,早在上世紀60年代就開始發展起來了,由於結構簡單、精度高、成本低,應用相當廣泛,不光飛機和導彈上有,有些大型裝備車輛上的導航設備上其實都安裝的有這個陀螺儀。
所以,真要是到衞星導航全被切斷的那一天,咱們依然還是可以利用慣性導航這樣的手段來行軍的,畢竟你新北市再複雜,總得有地物和地貌特徵吧,只要定上一個點,下面想去哪不就去哪兒了嘛。
至於實在沒有慣性導航設備的小分隊,地圖和指北針咱都有吧,每年基礎訓練裏的識圖用圖科目不就是幹這個用的嗎,還愁去台北會迷路?

還是勸台灣這些“磚家”們多看書,少忽悠了吧!
更多有趣好玩的軍事文章、視頻、圖片、電影、遊戲,請關注“軍武次位面”微信公眾號。打開微信,公眾號搜索“軍武次位面”點擊關注!