能抓蒲公英的機器人“超級抓手”來了!_風聞
中科院之声-中国科学院官方账号-1小时前
你能想象機器人抓手能有多輕柔嗎?比如穩穩抓取去殼生蛋,安全轉移一枚斑馬魚卵……
近日,中國科學技術大學將柔性材料與磁性科技結合,開發了多孔磁性軟體抓手(PMSG),為機器人抓取帶來了新可能。相關成果發表於《先進材料》。
01
仿生科技界的“温柔力量”
傳統剛性機器人試圖抓取柔弱的生物體時,往往會出現“手太重”的情況。它們的末端抓手雖然強大精準,但在面對像蒲公英、去殼生蛋等脆弱的目標時,硬邦邦的金屬“手指”容易施力過猛,造成不可挽回的損傷。
相比之下,軟體抓手可謂機器人界的“柔情高手”。它們能像章魚爪子一樣輕柔包裹住目標,適應形狀和大小各異的物體。無論是細小的導線,還是搖擺的魚,它們都能應對自如。
中國科學技術大學李木軍教授團隊在軟體抓手的基礎上更進一步,開發了多孔磁性軟體抓手——結合柔軟與磁性的“超級抓手”。
02
速度與柔軟的平衡
磁性軟體抓手因其操作靈活、反應迅速,並且對生物體安全,特別適合用來精細處理那些脆弱的生物體。然而,傳統磁性抓手在提升抓取力方面面臨一個挑戰:增加磁粉可以提高抓力,但同時也會使抓手變硬。這種硬度的增加往往導致抓手無法適應不同形狀的物體,降低了其適應性和抓取效率。
為了解決這一問題,科研人員採用了一種創新的方法:將碳酸氫銨作為造孔劑,與磁性硅膠混合。在加熱過程中,碳酸氫銨分解,形成無數微小的孔隙,這些孔隙不僅保持了抓手的高磁粉含量,還賦予了其優異的柔軟性。
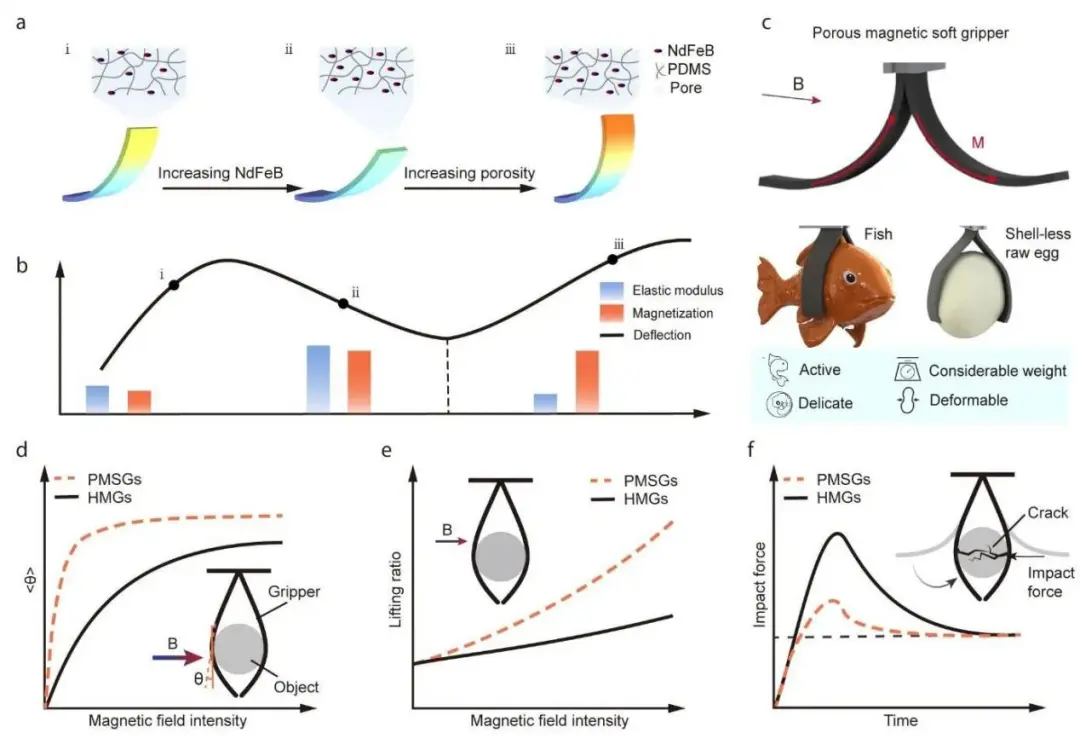
▲多孔磁軟體抓手設計
此外,內部的孔隙能夠吸收高速抓取時產生的衝擊能量,使得抓手以更輕柔的方式抓取物體,減少了對脆弱物品的損害風險。表面的多孔結構還增加了抓手與物體接觸時的摩擦力,這進一步提高了抓取的穩定性和可靠性。
這種將多孔結構引入磁性硅膠彈性體制造抓手的方法,使抓手具備高磁化、低模量和粗糙表面的特點,使其在保持強大抓取力的同時,也能夠適應各種不同的場景,展現出柔軟與速度的完美平衡。
03
開啓生物世界新互動
多孔磁性軟體抓手擁有廣泛的應用前景。它不僅是實驗室裏的“黑科技”,未來,它還可能會成為醫療微操作領域的新技術,幫助醫生輕柔無損地抓取精細的細胞樣本。
研究團隊還進一步開發了可遠程操作的多孔磁性軟體抓手,克服了傳統磁驅動抓手對大型電磁場線圈的依賴,更有利於與移動平台相結合。所設計的抓手能夠與移動機器人集成,實現對小雞的温和抓取與定點移動;還能與無人機集成,可以捕獲水中的小魚,並迅速地將它們進行遠距離的安全轉移。
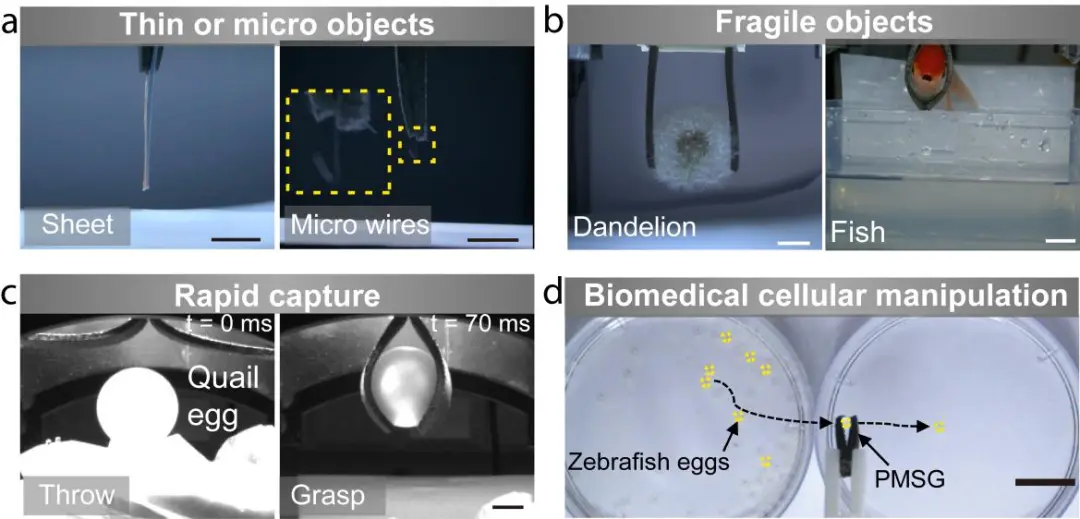
▲軟體抓手的多功能性展示:(a)抓取薄板和細線;(b)抓取魚和蒲公英;(c)抓取去殼生蛋;(d)安全移取斑馬魚卵。
多孔磁性軟體抓手在未來的野外生物樣本收集和生物醫學研究中或將發揮更加重要的作用。這一技術為未來的機器人與生物世界互動開啓全新篇章。
來源:中國科學技術大學