印日探月任務瞄準月球南極,多重難題待解_風聞
剑啸易水寒-深知身在情长在,前尘不共彩云飞。1小时前
來源:中國航天報
近日,印度空間組織公佈了與日本合作的月球極地探索任務新方案。在印度“月船3號”任務和日本SLIM月球着陸器、H-3火箭相繼成功的基礎上,雙方將嘗試向月球南極投送着陸器和巡視器,勘測水冰資源。那麼,這次探月任務有何亮點?雙方需要克服哪些困難?未來,隨着新技術應用,各國探索月球南極任務有可能出現哪些新跡象?
優勢互補 雄心勃勃
近年來,日本和印度連續實施探月任務,均取得了一定的成果,也暴露出各自的能力不足,為開展探月合作奠定了基礎。2017年12月,日本和印度簽訂聯合探月協議,計劃由印度研製着陸器,由日本研製巡視器,並由日本H-3火箭發射,瞄準月球南極。根據雙方設計,探測器的發射質量約為6~6.5噸,乾重略超過1噸,其中巡視器乾重約為350公斤。
今年10月,印度公佈了該任務的更多細節,正式命名為“月船5號”,預計在2028年或2029年發射,稍晚於印度獨立推進的“月船4號”月球採樣返回任務。
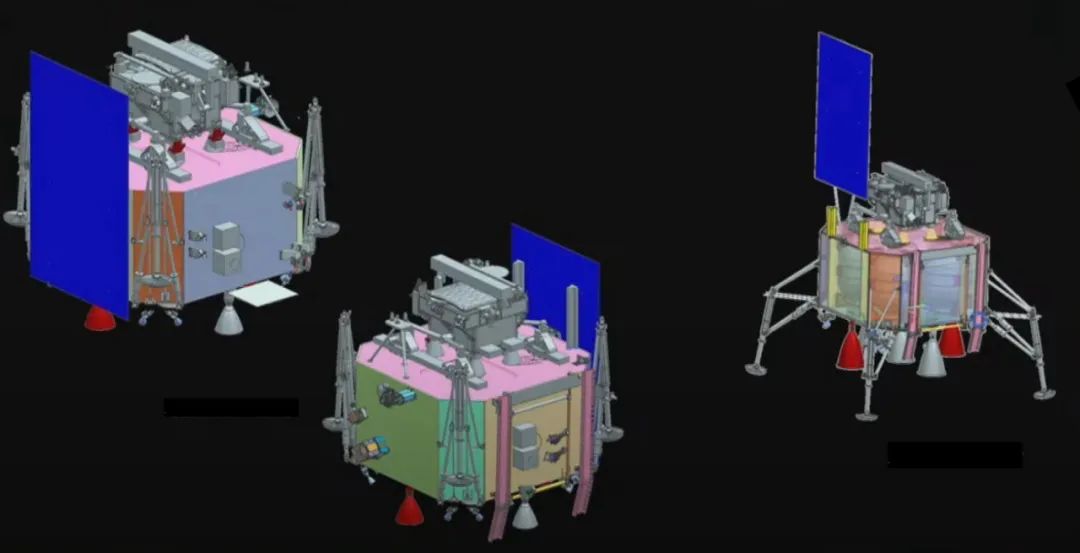
印度研製的“月船5號”任務着陸器不同狀態示意圖
日本將為這次發射任務專門打造H-3-24S火箭,第一級使用2台發動機,捆綁4枚助推器,配備短整流罩。日本臼田觀測站的64米天線和印度班加羅爾部署的32米、18米天線將執行測控任務。
印度負責為探測器設計飛行軌跡:探測器將被火箭發射至近地點高度250公里、遠地點高度14萬公里的地球軌道上,隨後在軌點火,逐步爬升到遠地點高度43萬公里的奔月軌道;接下來,預計經過3次近月制動後,探測器將進入近月點高度30公里、遠月點高度200公里的月球軌道,並擇機實施動力下降,嘗試軟着陸月面。
該任務規劃的理想着陸點位於月球南緯89.45度、東經222.85度,屬於沙克爾頓撞擊坑邊沿,距離月球南極點僅有17公里。兩國科研人員預測,“月船5號”着陸誤差有望控制在100米內,通過精心分析月面地形,選定較高的山脊線,可以幫助着陸器在較長時間內獲得較好的光照條件。
兩國科研人員之所以對着陸器的落月精度如此自信,主要原因是今年初日本SLIM探測器成功驗證了月球着陸圖像匹配製導算法技術,相關成果將應用於“月船5號”任務。當時,SLIM探測器遭遇發動機噴管斷裂事故,仍未明顯影響着陸精度,可見技術驗證相當成功。
不過,“月船5號”任務的着陸器設計仍在變化中。今年9月,印度發佈信息顯示,着陸器放棄了此前的5台800牛變推力發動機方案,改用1台3100牛變推力發動機配合4台1500牛變推力發動機。10月,方案又變成了2台3100牛變推力發動機配合3台1500牛變推力發動機。
在着陸器安穩落月後,巡視器將從着陸器平台駛下,展開太陽翼,進入範圍方圓500~1000米的“探測區域”運行,嘗試尋找潛在的水冰資源,並劃定安全工作區間。在運行期間,巡視器還將駛入月表永久陰影區,使用多種載荷設備開展探測,包括由探地雷達勘測月面地下結構,由鑽機進行1.5米深的鑽探作業,獲取月壤樣品。
與此同時,着陸器將展開大型單片式太陽翼,持續供應電力,計劃在月球表面“存活”超過100天。印度空間組織稱,這將為印度長期月球任務和“殖民地任務”奠定基礎,也是為未來印度建設月球基地積累經驗。
挑戰難關 隱患不少
外界認為,月船5號探測器的一些設計指標超出了印度航天的技術實力,對兩國科研人員來説,在多個方面可謂挑戰重重。
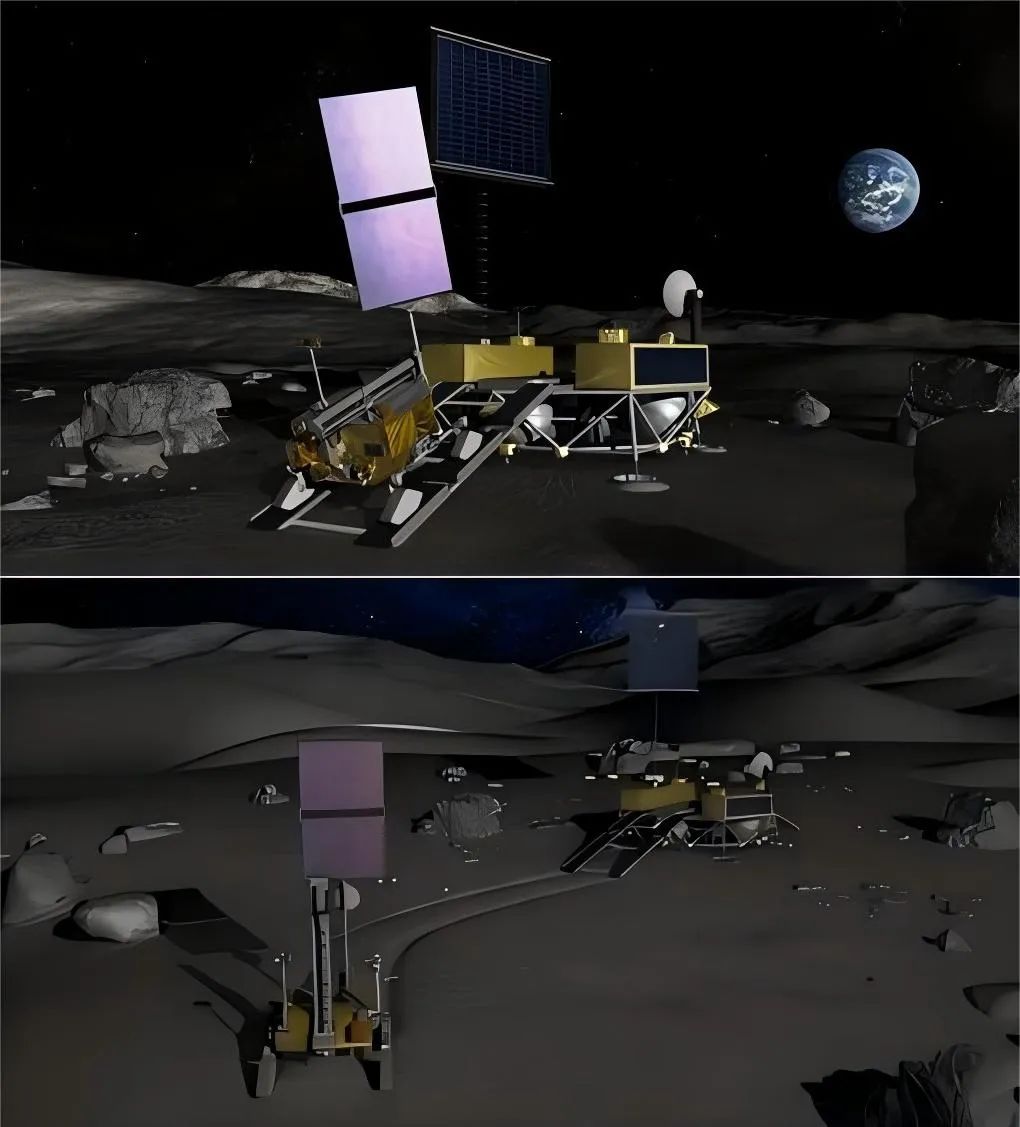
日本研製的巡視器離開着陸器效果圖
首先,月船5號探測器的乾重僅略超過1噸,去掉巡視器的話,只有700公斤左右。這意味着,探測器為了裝載更多燃料,設計預留的冗餘較低,結構質量佔比甚至低於一些火箭上面級。然而,探測器落月過程中需要熬過動力下降階段,必須確保耐衝擊性能,“佔用”一定的質量來強化、完善結構是不可避免的,因此月船5號探測器面臨的結構設計挑戰較大。
其次,月船5號探測器的發射質量不低於6噸,可能會應用航天史上最重的單體無人月球着陸器,風險不容忽視,對設計水平要求較高。但同期公開的月船4號探測器方案表明,印度航天單位在探月器的結構設計和設備集成方面仍有較大的提升空間。
再次,着陸器的動力系統存在隱患。今年9月和10月,印度先後公佈了截然不同的着陸器變推力發動機組合方案。外界推測,有可能是原方案推力不足,迫使印度空間組織修改設計。在落月過程中,各型號發動機將精準調節推力,通過多台發動機交替關機,努力保障平穩着陸,對可靠性的要求很高。
同時,印度設計的着陸器偏高,有可能難以為巡視器提供合適的坡道。外界認為,印度有可能借助外援,改用類似美國“火星吊車”的方案。
另外,由於預計着陸點的緯度限制,着陸器將在連續半個月內每天與地球有通信“窗口”,隨後半個月持續“斷聯”,最好在大橢圓環月軌道或近直線暈軌道上部署地月中繼衞星,保障通信順暢。印度和日本暫未提出類似任務規劃,或許是希望藉助西方繞月空間站。
最後,月球南極着陸環境也造成了不小的挑戰。月球南極-艾特肯盆地是已知的太陽系最大天體撞擊坑,地形地貌被更多天體撞擊痕跡“切割”而支離破碎,沙克爾頓撞擊坑邊沿僅有數百米寬的地區相對適合着陸。屆時,着陸器需要藉助測距儀等儀器,精準掌握月表複雜地形情況,根據即時測量數據,運用高水平算法,快速響應,調整發動機推力。
2023年4月,日本白兔-R着陸器因為月表複雜地形引發誤判,提前控制發動機減速,“盲降”墜毀。“月船5號”想要成功落月,應依靠月球軌道器積累着陸點和下降軌跡附近的地理資料。目前,印度月船2號軌道器儀器開機時間有限,兩國可能向其他國家求助。
全面佈局 籌劃開發
近年來,隨着關於月球水冰資源的新發現越來越多,各國探月任務逐漸聚焦月球南極。那裏的破碎地形造就了眾多永久陰影區,為多功能月面巡視器、極寒環境鑽探挖掘設備等提供了用武之地。相比設計偏向傳統的“月船5號”,更加豐富多樣的月球南極探索任務規劃可謂方興未艾。
值得注意的是,除了少量技術驗證任務外,通信是探測器大規模部署月球南極所繞不開的問題。在月球南極,特別是眾多撞擊坑內,探測器缺乏直接與地球通信的便利條件。為此,科研人員需要在地月中繼衞星、月球軌道器等基礎上逐步建設地月空間通導遙綜合星座,支持對全月面設備的即時跟蹤、數據處理和信息中繼。在月面一些關鍵地點,未來可設置導航增強站點,提高定位精度和服務覆蓋範圍。

未來大型巡視器有望幫助航天員探索月球南極
為了克服月球南極的不利地形,未來月面巡視器可能會呈現兩大發展方向:其一,藉助核電源技術進步,部署少數大型核動力巡視器,跨越數千公里,採樣數百公斤,勘測多個撞擊坑的水冰分佈情況;其二,根據具體目標,在通用平台上集成不同的模塊化載荷,部署一系列小型巡視器/跳躍器/飛躍器,配合載人登月任務,擴展任務包線。比如,探測器可以跳躍/飛躍進入邊沿坡度較陡峭的大型撞擊坑,執行多樣化任務。
勘測月球水冰資源任務顯著促進了航天器鑽機發展。預計低於2米的傳統鑽探深度逐漸不能滿足需求,科研人員正在研製鑽探深度達10米的新型鑽機,擴大采樣範圍。還有科研人員提出了更加“科幻”的方案:從月球軌道器上投擲“穿透器”,藉助高速動能,鑽入月表地下更深處勘探。
總之,隨着核電源、微光成像相機等新技術應用,在地月空間通導遙綜合星座、繞月空間站等支持下,未來探測器有望廣泛覆蓋月球南極區域,高效完成勘探、開發任務。不過,作為複雜龐大的系統工程,這一切都離不開嚴謹科學的論證決策、穩妥的技術進步和宏觀長遠的規劃。