這是啥黑科技?軍用爬牆機器人為啥能在垂直牆面如履平地?_風聞
军武次位面-军武次位面官方账号-专注于高品质的趣味军事科普,打造男人最爱看的频道23分钟前

要不説兔子家的演習總能爆出來黑科技嘛,前有中泰“突擊-2024”聯訓解放軍遛機器狗,後有中新“合作-2024”聯訓亮相爬牆機器人。

在這場演習中,中方隊員們利用爬牆偵察機器人精準掌握暴恐分子的人數、位置和動向,那這款可沿樓宇牆面爬行,進行抵近式隱蔽偵察的特種機器人到底是怎麼飛檐走壁的呢?


爬牆機器人其實有兩大核心,一是能在各種牆面上如履平地的吸附技術,二是能在垂直與水平面自由切換的運動機構。
吸附是爬牆機器人首先要解決的難題,無論是冷冰的玻璃、高聳的水泥牆面,還是光滑的瓷磚、甚至可能帶有弧度的金屬表層上,它必須在都能穩定停留。

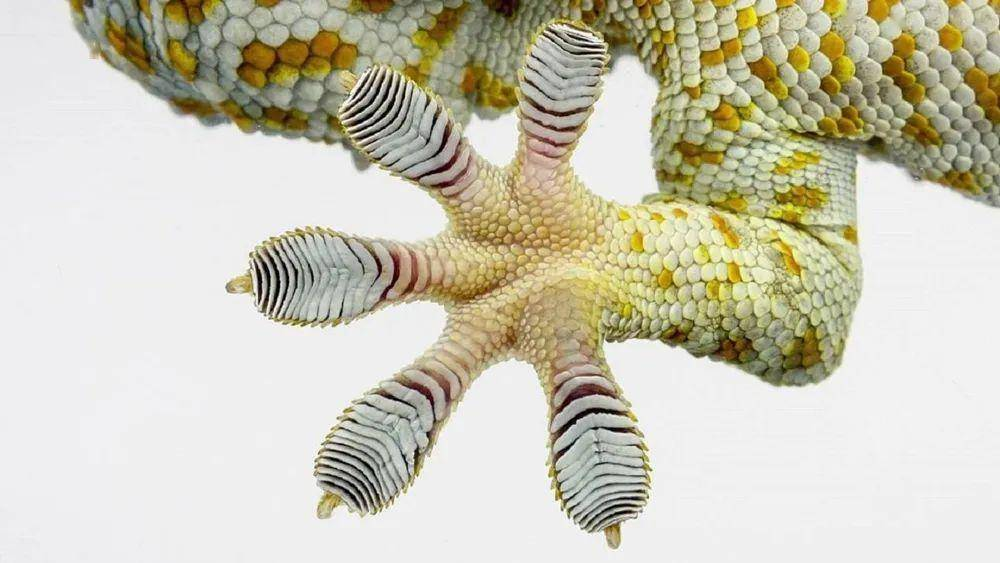
我們知道,人類攀巖手腳都得找凸起點,壁虎用爪子上的微小絨毛結構來增大摩擦力,機器人要想趴在牆上,就需要一種強大的、可調節的吸附系統。
當前較為成熟的方案是負壓吸附,通過特殊設計的密封墊圈和微型真空泵,機器人在緊貼牆面時能迅速抽走接觸面與外界之間的空氣。
當這個個密封空間內的空氣被部分抽走後,內部氣壓低於外部大氣壓,外面更高的氣壓就會“迫不及待”地把接觸面緊緊壓在一起。
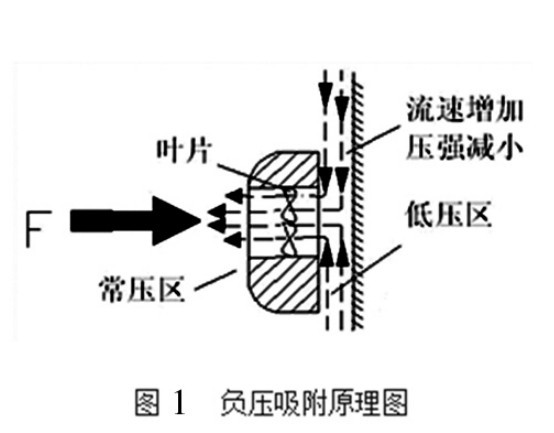
你可以想象一下,拿一個帶有吸盤的掛鈎,用力壓在光滑的牆面或玻璃上,然後輕輕一拉,掛鈎就很難拉下來了,這種常見的生活現象正是負壓吸附的基本原理。

而爬牆機器人就是利用這個原理在垂直牆面上穩穩地“站”住的,負壓吸附説起來並不複雜,本質是利用壓力差造成的吸附力。
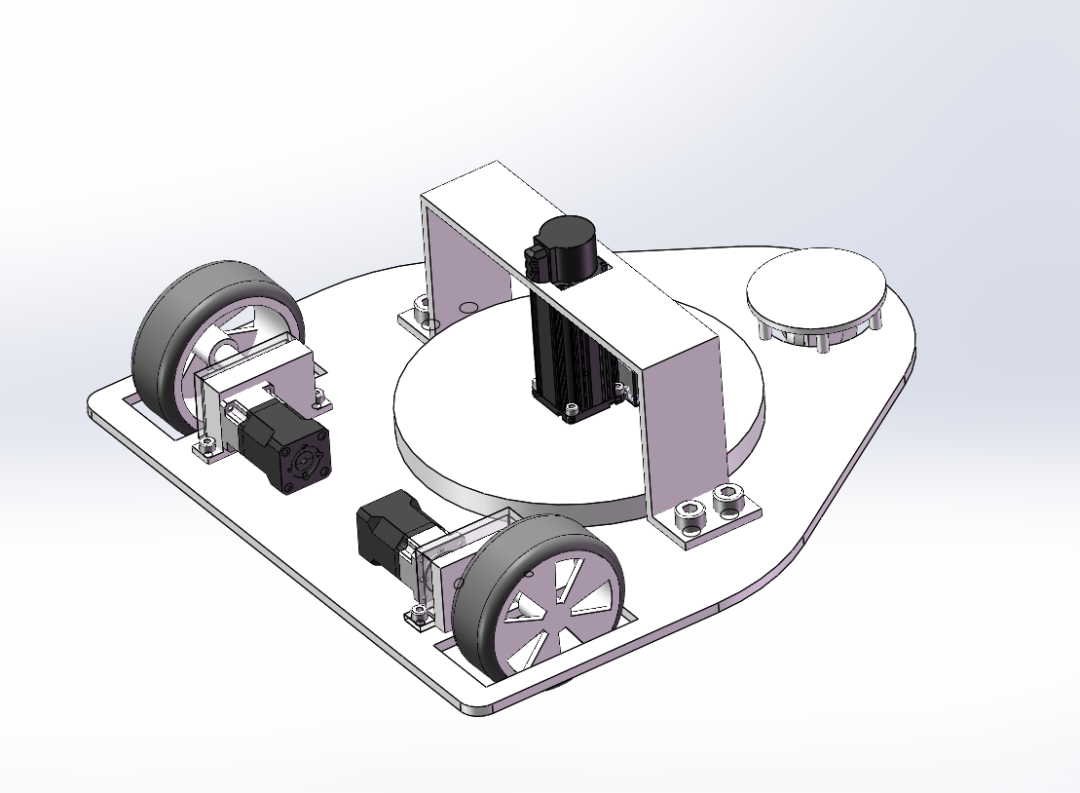
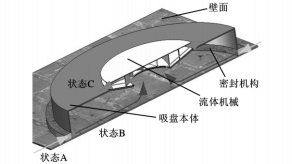
▲某型爬牆機器人內部結構示意圖,中間圓形部分即為負壓吸附裝置
要在現實中實現這種吸附效果,爬牆機器人需要幾個關鍵部件,首先是特殊設計的“吸附模塊”,通常包括帶有密封墊圈的吸盤結構。
這個墊圈必須有良好的彈性和適應性,能夠與牆面緊密貼合,把空氣密封起來。由於牆面材質千差萬別,有的很光滑,有的粗糙不平,如果密封性能不好,空氣容易漏進去,負壓就無法維持。
比如,當爬牆機器人攀爬玻璃幕牆時,平滑表面有利於貼合,但若有水滴或灰塵,就會影響密封效果,這時控制系統可能會通過傳感器檢測吸附力降低,從而增加抽氣力度,或命令機器人稍作移動,選取更乾淨的接觸點。
當面對粗糙的混凝土表面,柔性墊圈的彈性就起關鍵作用,它能在凸凹不平的表面中擠壓出較好的貼合面。

如果仍有縫隙,機器人控制系統可能會讓吸附點稍微移動幾毫米,尋找最佳位置。有的設計甚至允許吸附模塊進行微小的旋轉或偏移,以此找到表面紋理中的相對平整區域。
因此,吸附模塊的材料選擇很重要,比較常用的方案是採用柔性、耐磨、還能適應輕微表面不平度的橡膠或聚合物材料。
同時,墊圈的設計也會考慮到不同表面的情況,比如設計成環形或多段獨立壓緊點,以便在微小縫隙和凹凸中仍能保證相對嚴實的密封。
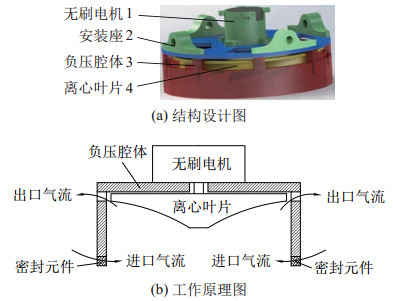
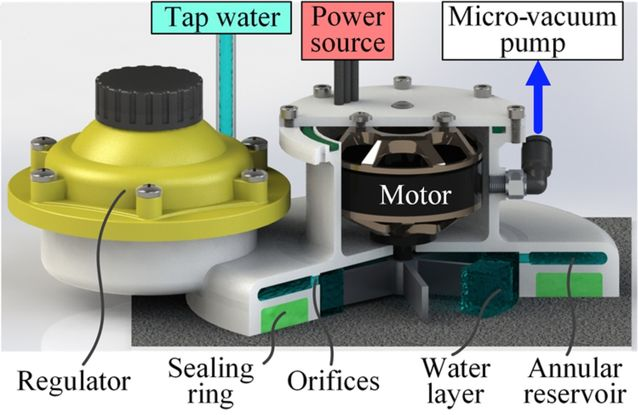
▲某種負壓吸附裝置
還有一種思路是分區吸附,這種不是隻有一個大吸盤,而是使用多個小型吸附模塊組成的陣列。這樣萬一其中某一模塊在某點的吸附效果不好,其他模塊還可以分擔壓力,整體依然保持足夠的附着力。
同時,多模塊設計也方便機器人進行分區管理,通過智能控制,讓每個小吸附單元各司其職,針對局部減壓或泄漏做精準補償,這樣“吸盤陣列”就能像一個團隊共同努力抓牢牆面。

有了密封結構,接下來就要排氣了,在機器人內部,會安裝微型真空泵或者氣流抽取裝置,當機器人將吸附模塊貼上牆面,它的控制系統會啓動這些泵,把吸附模塊內部的空氣不斷抽出,讓內部氣壓下降。
再就是為了解決能耗和噪音問題,爬牆機器人往往還要在內部設計了一個循環系統,把部分抽出的空氣導向內部的特殊艙室,再利用控制閥門和精密調節,讓內外氣壓在微觀層面處於平衡狀態,減少頻繁抽氣的需要。
這樣既能降低能耗,又有利於減小噪音,保持偵察等隱蔽任務的靜音要求,像現在做得比較好的負壓吸附系統可以使得機器人噪音控制在50分貝以下,非常利於軍事偵察任務,在此次聯合訓練中亮相的克萊明爬牆偵察機器人,使用的應該就是負壓吸附方式,

除了負壓吸附,還有磁性吸附,主要是通過調節電流強弱改變磁力大小,使機器人像一隻掌握磁場的機械昆蟲一樣,牢牢貼在在具有金屬成分的牆體上,不過這種方式侷限性比較大,畢竟要是牆面不具備磁性,磁力再強也無濟於事。
另有一些仿生學思路試圖模仿壁虎腳掌的分形結構,讓機器人足部使用大量微納米級細纖維與牆面產生範德華力,實現如同壁虎般的“幹粘附”效果,但這類技術尚在探索階段,所以,目前較為成熟和通用的仍是負壓式吸附。

有了吸附能力,機器人便能呆在牆上,但這只是第一步,接下來它還需要在牆面上移動,這就要處理重力方向與傳統地面運動大不相同的挑戰了。
地面行走中,輪式或履帶式的移動方式已經很成熟,可在牆上,輪子貼着垂直面轉動,阻力、摩擦力和平衡感都與平時截然不同。

我們知道,當你在攀巖時,一般會先用一隻手抓牢巖壁,再抬起另一隻手尋找下一個支點,然後換腳,再換手,在這個過程中,你不可能同時放開所有抓點,否則你會掉下去。

爬牆機器人也是如此,它使用多個吸附模塊,每次移動時,至少保留部分吸附點牢固貼緊牆面,然後放開其他吸附點進行位移,當新的吸附點穩固後,再次交替釋放舊的吸附點。
當然了,這個過程需要精確的時序控制和力學計算,以確保機器人在整個移動過程中始終有牢固的“抓點”,在切換吸附點的那一瞬間不會產生振盪和滑落。
另一個關鍵是運動機構的柔性驅動設計,由於爬牆機器人面對的牆面有時並不平整,甚至有弧度、凹槽或突起。
柔性驅動的就是讓機器人能通過軟性材料、彈性元件或柔性關節,在遇到不平整的表面時,能像攀爬生物一樣靈活扭動身體適應環境。

在爬行過程中,柔性驅動可根據傳感器的反饋快速調整驅動力方向與大小,使機器人能夠在垂直方向上靈活轉向,避開障礙或找到更適合吸附的區域。
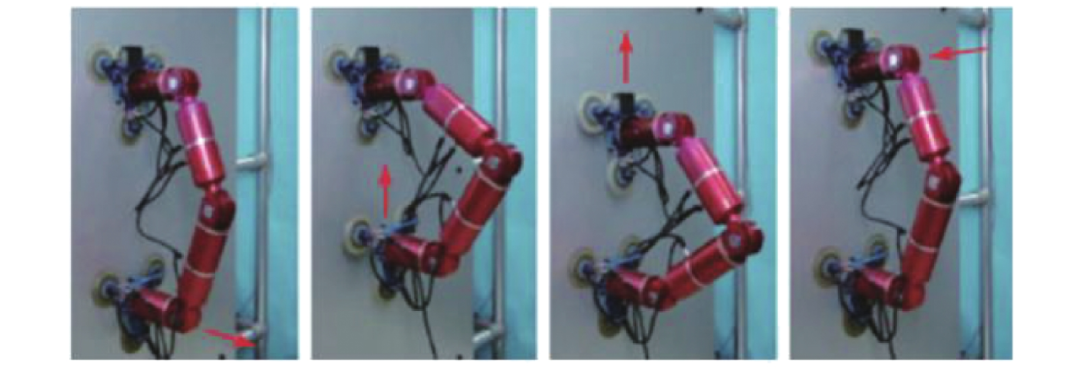
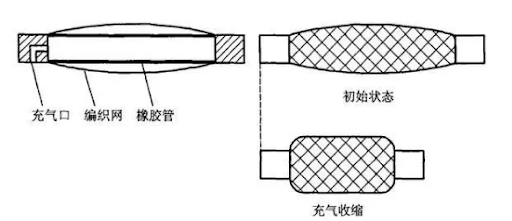
柔性驅動有很多種,有的採用類似於氣囊或柔性材質的驅動器,通過充氣或抽氣改變其形狀,類似於軟體機器人那樣彎曲變形,實現貼合牆面的動作。
有的使用智能材料,如形狀記憶合金,通過温度控制改變構件的形變特性,使機器人像擁有肌肉和關節一樣,在柔性驅動和吸附-移動交替模式的雙重加持下,爬牆機器人就實現了動態適應。
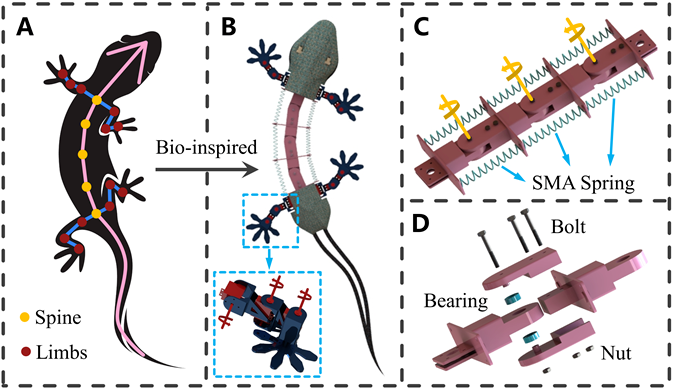
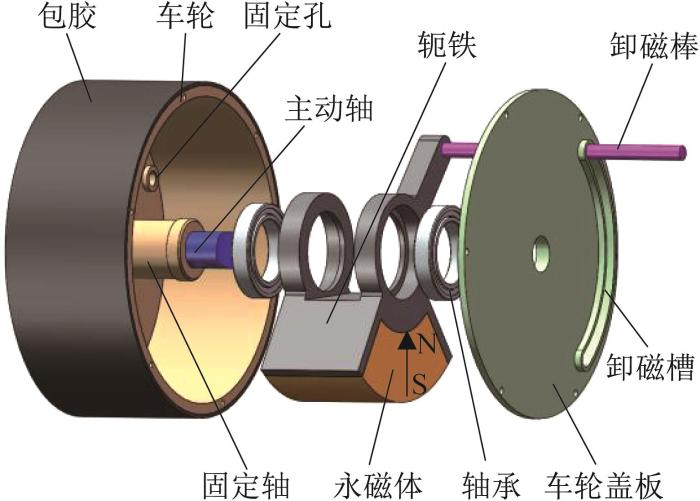
▲基於形狀記憶合金彈簧驅動柔性脊柱的仿壁虎機器人
或許在未來,爬牆機器人將變得更加智能、更具適應性,幫助人類到達危險而不可及的垂直空間。
而這一切的基礎,正是看似不起眼但其實玄妙非常的吸附技術與運動機構設計,它們是一切垂直奇蹟的真正背後推手。