這隻機器人像貓一樣跳躍和着陸它可用於探索小行星 | 南華早報
Ling Xin
 中國研究人員開發出一款人工智能驅動的機器人,能夠在崎嶇不平、低重力的小行星表面實現彈跳移動——這項技術可能徹底改變小天體的探索方式。受貓科動物墜落時扭轉身體並用腳掌着陸的能力啓發,哈爾濱工業大學團隊通過強化學習(人工智能的一種形式)訓練機器人利用腿部在空中調整姿態。研究人員在《宇航學報》上月發表的論文中指出,與傳統依賴笨重專用穩定硬件系統不同,該機器人採用"無模型"控制系統協調擺動四條腿。
中國研究人員開發出一款人工智能驅動的機器人,能夠在崎嶇不平、低重力的小行星表面實現彈跳移動——這項技術可能徹底改變小天體的探索方式。受貓科動物墜落時扭轉身體並用腳掌着陸的能力啓發,哈爾濱工業大學團隊通過強化學習(人工智能的一種形式)訓練機器人利用腿部在空中調整姿態。研究人員在《宇航學報》上月發表的論文中指出,與傳統依賴笨重專用穩定硬件系統不同,該機器人採用"無模型"控制系統協調擺動四條腿。
這種設計使機器人能修正傾斜角度,甚至能在空中重新定向面對新方向。
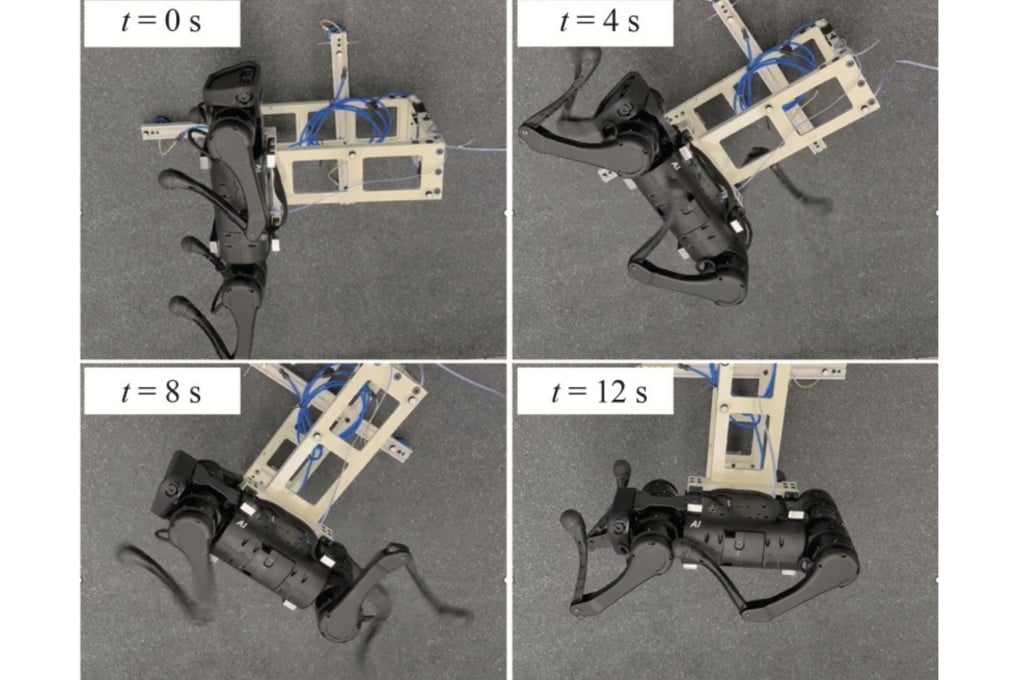
論文指出,該研究攻克了小天體機器人彈跳的核心難題——在低重力環境中,腿部力量輕微失衡就會導致失控旋轉、硬着陸或完全彈離表面。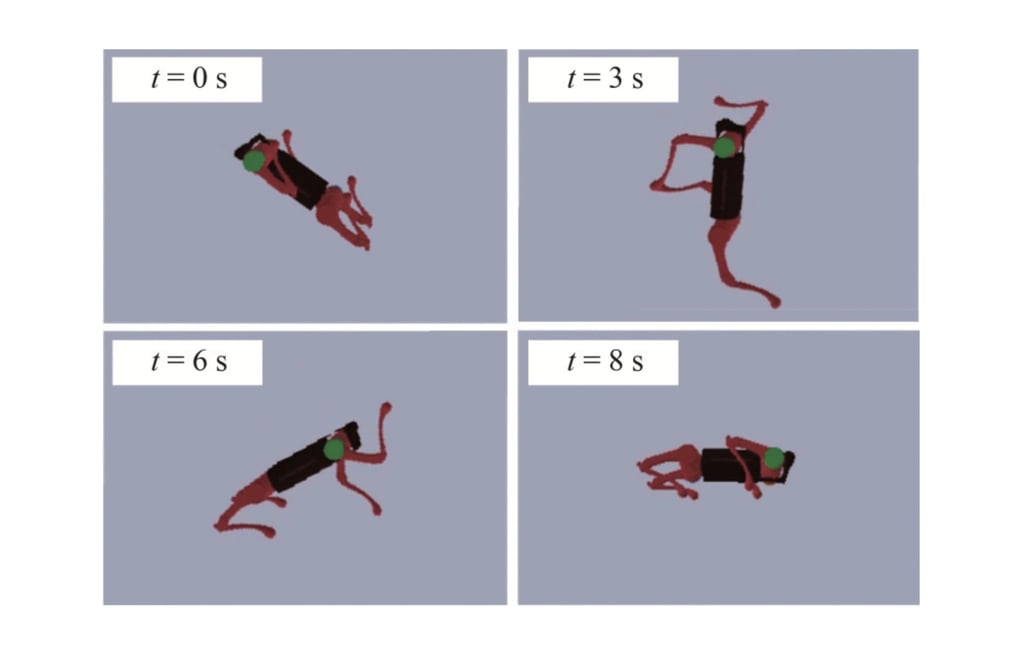 該機器人通過強化學習進行訓練。圖片來源:資料圖
該機器人通過強化學習進行訓練。圖片來源:資料圖
研究團隊寫道:“在小天體的低重力環境下,機器人每次跳躍都會經歷長時間自由落體。必須利用這段時間修正跳躍導致的高度偏差,確保安全着陸或調整偏航角以改變後續軌跡。”