19自由度假肢靈巧手,復現人手級運動能力!_風聞
中科院之声-中国科学院官方账号-4小时前
人的手具有23個自由度,雖然重量僅約為人體重量的1/150,但是其運動功能佔全身運動功能一半以上(54%)。手的靈活度是體現人類以及人形機器人工作能力的關鍵指標。
中國科學技術大學及合作者成功研發了一套具備19自由度的輕質仿生靈巧手。它能復現人手級別的功能,不僅能提高人形機器人的靈巧操作能力,還有望為全球千萬上肢截肢患者提供手部功能重建與日常生活輔助服務。
01
自由與輕巧難以兼顧
假肢靈巧手是一種模擬人手高自由度結構和靈活運動功能的康復輔助器具,能夠幫助上肢截肢者完成手勢表達、抓握及操作物體等任務,有效提升其生活自主性。
傳統假肢靈巧手通常使用電機驅動,致使功率密度低,難以在自由度與重量之間達到理想的平衡狀態。這使得患者在佩戴超過人手重量的靈巧手時感到嚴重不適。此外,自由度較低(通常少於10個)的靈巧手僅能實現有限的抓握動作,遠不及人手的靈活性。這些原因導致接近一半的患者放棄使用假肢靈巧手。
因此,找到兼顧高自由度靈巧運動和舒適佩戴重量的設計方法,是假肢靈巧手領域的重要科學問題之一。
02
靈活堪比人手
研究團隊以高功重比形狀記憶合金(SMA)為人工肌肉驅動,仿生設計出類肌腱傳動系統,放大SMA的驅動力,同時減小傳動阻力。基於類肌腱分離傳動特徵,研究團隊在手指及手腕內嵌入23組傳感單元以實現關節精確運動控制。
該假肢靈巧手還集成了包含冷卻模塊的38組陣列式SMA驅動器,使其實現19自由度運動,完成的動作更加靈活、自然。
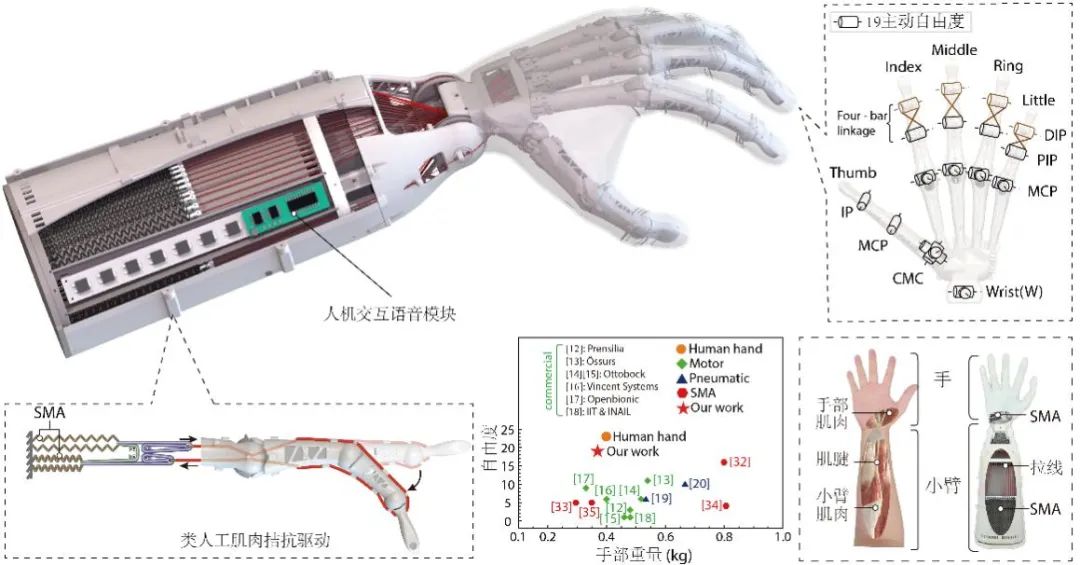
▲基於SMA人工肌肉驅動的高自由度輕質假肢靈巧手結構
得益於仿生設計方法和高度集成方法,該假肢靈巧手僅重0.37千克,具備人手級別的靈巧操作能力,可完成諸如梳頭、寫字、握手、遞名片和下棋等日常精細操作任務,同時實現了佩戴舒適性、高自由度和精確可控。
高集成形狀記憶合金還能確保假肢手的抓握能力,最大負載達2.5千克,滿足患者日常所需。
03
讓假肢更“懂”患者
相比傳統的易受出汗、肌肉疲勞等因素干擾且需要反覆標定的肌電控制技術,語音識別技術允許患者直接將運動意圖通過語音輸入到假肢手中執行,操作簡單、普適性強、性能穩定,極適於在截肢患者中普及。
通過與科大訊飛語音識別技術結合,研究團隊讓假肢靈巧手具備了簡單、友好且低成本的人機交互能力,支持60種語言和20種方言,具備95%的識別準確率和毫秒級的響應時間。
在臨牀測試中,一名60歲女性截肢患者僅用半天便熟練掌握該假肢靈巧手的使用,成功完成了多項標準假肢手功能評估實驗中的代表性任務,比如抓握、操作,以及翻書、係扣等日常生活常見操作。

▲假肢靈巧手的類人手勢、抓握、操作功能及患者實驗展示
值得一提的是,該假肢靈巧手還展現了操作剪刀、使用手機以及複雜的手語手勢的能力,精準復現了傳統的33種人手抓握動作,還可完成6種更高難度的新抓握動作,使用場景豐富。
高自由度假肢手的研發,為實現靈活性和可穿戴間理想平衡提供了有效的思路。
相關論文信息:
https://www.nature.com/articles/s41467-025-56352-5
來源:中國科學技術大學