盤點美國的鴨翼戰機(下)_風聞
大鱼鉴水-温哥华的鱼官方账号-军事杂谈1小时前
格魯曼X-29

上世紀80年代初,美國空軍、國防高級研究計劃局(DARPA)和NASA為了探索前掠翼佈局的可行性計劃製造實機進行研究驗證。在競標中格魯曼712方案戰勝了通用動力的F-16 SFW前掠翼方案,被授予X-29的編號,共製造2架。

> F-16 SFW和常規F-16對比,該機採用的是常規平尾,沒有製造實機
前掠翼和後掠翼一樣能夠推遲激波產生,提高飛行速度。不同的是大攻角時流過前掠翼上表面的氣流沿展向向翼根匯聚,氣流分離從翼根開始,翼尖不易時速,誘導阻力低,提高了升阻比,襟副翼的舵效也更高,操控性能好,結構重量分配更均勻,可以實現更小的空速、更好的高攻角穩定性及抗失速/尾旋特性、更短的起降距離、更大的亞音速航程。
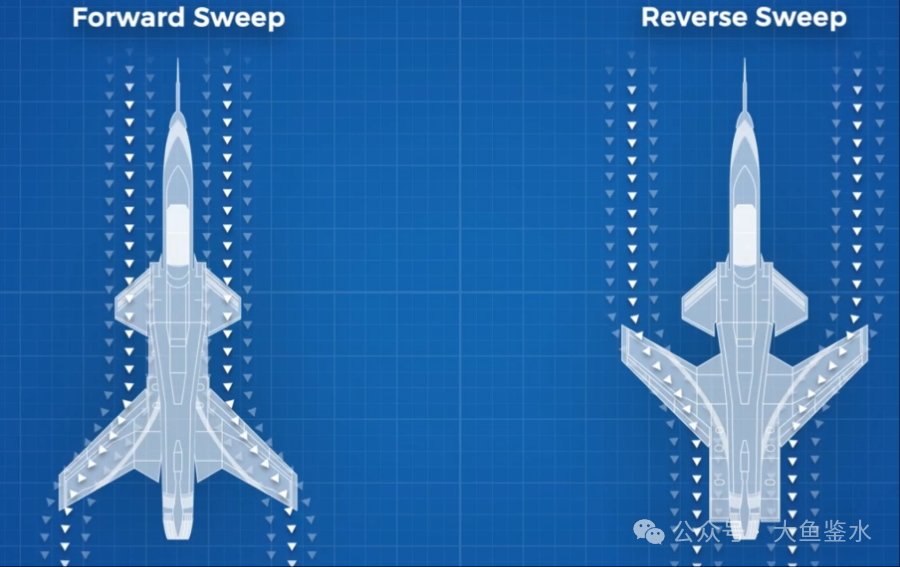
> 後掠翼和前掠翼展向氣流流動路徑對比
早在二戰期間德國就研製過容克287前掠翼轟炸機,它搭載4台噴氣發動機,在試飛中曾達到512公里/時的巡航速度,二戰4發螺旋槳轟炸機中速度最快的B-29巡航速度僅為354公里/時。

但是前掠翼有一個致命缺點抵消了上面所有這些優勢,那就是由翼尖部分開始的氣動彈性發散:翼尖在氣動載荷作用下扭轉變形令局部攻角增大,更大的攻角引起氣動載荷進一步增加,陷入惡性循環。如果不增強機翼結構將無法抑制機翼外段的扭轉變形,嚴重的甚至導致機翼折斷;結構補強的話增加的重量將抵消前掠翼的好處。這個無法調和的矛盾直到70年代通過複合材料不同方向鋪層的彈性耦合設計才基本解決,令比常規後掠翼減重30%左右的前掠翼能夠承受氣動扭轉力矩。

> 進行主翼和鴨翼結構測試的X-29,可以看到翼面複合材料的肌理
X-29對前掠翼的設計、製造和運用進行了有益的嘗試,它採用前掠角33度的石墨環氧樹脂複合材料前掠翼,增加了梯形全動鴨翼以提高機動性,主翼翼根向後延伸到尾噴管旁形成後邊條,可動的尾端氣動面起到平尾升降舵的作用,構成變相的三翼面部件。鴨翼和前掠翼配合可以減少配平阻力和波阻,而重心偏移的情況下使用邊條配平比依靠鴨翼偏轉補償配平阻力更低。

這種靜不穩定的趨勢必須依靠電傳操縱系統控制,該機配備了3套數字計算機和3套模擬計算機。為了節省經費直接採用F-5A的機身和前起落架,主起落架和氣動面驅動系統來自F-16。


> F-5和X-29對比
X-29共製造2架,於1984年12月14日在愛德華茲空軍基地首飛,這是繼容克287和德國HFB-320小型客機後第三種實現飛行的前掠翼噴氣機,也是第一種以超音速平飛的前掠翼機。

2架X-29進行了242次試飛,對前掠翼的結構和飛行特性、極端不穩定狀態下的飛控系統、大攻角控制、渦流控制等航空技術進行了成功的驗證,試飛中瞬時最大攻角達到67度,遠超同時代的戰鬥機,當時現役戰鬥機中可用攻角最大的F/A-18也只有55度,F-16被飛控系統限制在25度以下。
13年後的1997年9月25日,俄羅斯首飛了前掠翼蘇-47“金雕”驗證機,採用蘇-27的前機身、垂尾和起落架,新設計的全動平尾,主翼結構的碳纖維復材比例為90%,配置了內置彈艙和矢量噴管,和X-29相比基本具備了空戰能力。測試中蘇-47展示出非常高的機動性,不過這種優勢主要體現在低速和跨音速區間,而當時美國已經研製出具備超音速機動性的5代機(F-22在18天前首飛),因此俄羅斯沒有繼續開發前掠翼機型。


麥道F-15 STOL/MTD與F-15 ACTIVE

冷戰時期北約一直擔心縱深過淺的中、西歐空軍基地在開戰時即被摧毀,無法及時起飛戰術飛機支援一線地面部隊,各國熱衷於研發垂直/短距起降技術。英國研製了肖特SC.1和鷂式,法國除了常規佈局的幻影III V還拿出了驚世駭俗的C.450“甲蟲”尾坐式環行翼驗證機,德國開發了以F-104為基礎安裝翼尖傾轉發動機的VJ101C戰鬥機和推力換向發動機+升力發動機的VAK 191B攻擊機。
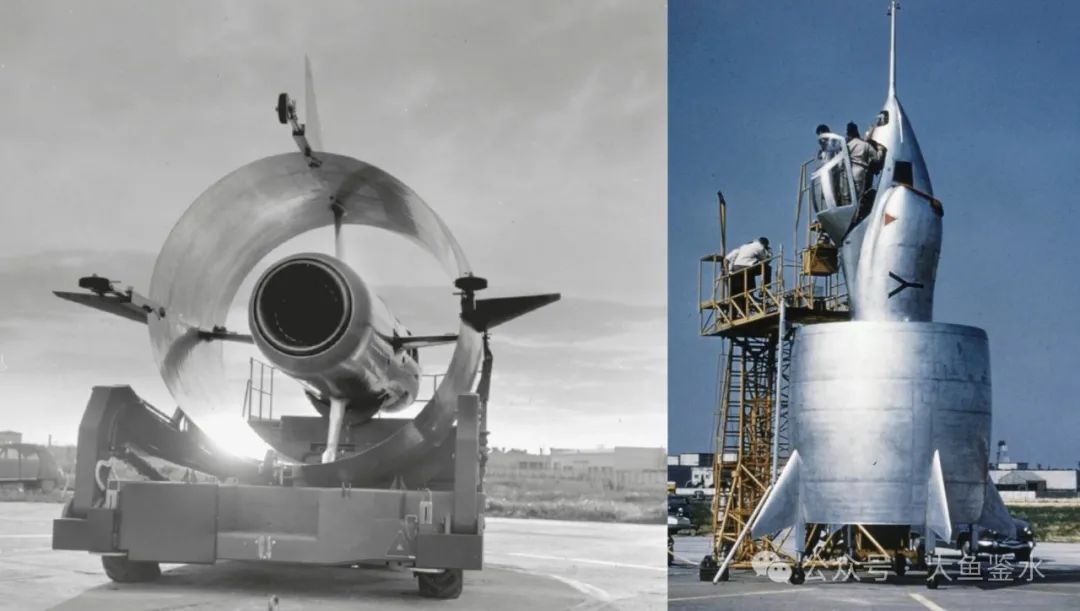
> 1959年首飛的斯奈克馬C.450“甲蟲”,外形像個倒過來的蛋筒冰淇淋,共試飛過9次,最後一次嘗試轉入平飛時失控墜毀

> 1963年首飛的VJ101C,這是世界上第一架超音速垂直起降飛機,配備6台羅羅RB.145發動機

> 1965年首飛的達索幻影III V,在機身裏塞進了8台羅羅RB.162升力發動機,最大速度達到2.04馬赫

> 1971年首飛的VAK 191B,可以看作鷂式和雅克-38的混合體,在1台推力換向發動機前後各佈置了1台升力發動機
美國也先後研製了尾坐垂直起飛的康維爾XFYY-1和瑞安X-13;貝爾規劃中的D-188A和VJ101C非常接近,不過發動機增加到8台。為參加TFX項目選型,共和航空還推出過AP-100垂直起降戰鬥攻擊機方案,安裝6台J85渦噴發動機驅動3部升力風扇,設計最大速度2.3馬赫,可投擲核彈,最後輸給了F-111。

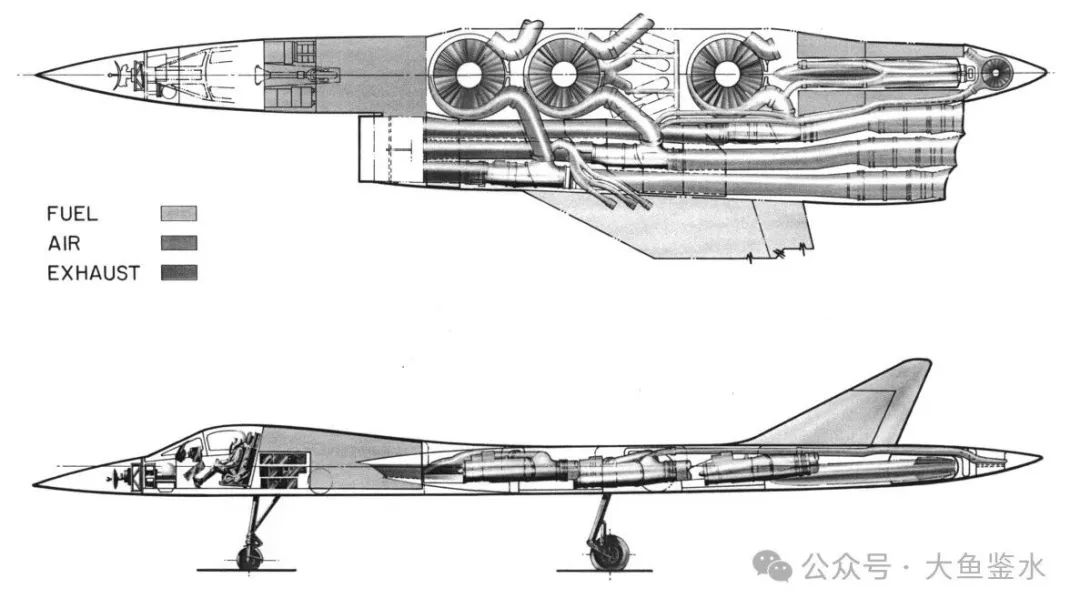
> AP-100效果圖和結構圖,內部管路設計極為複雜,很難想象這是1961的方案
這些五花八門的垂直起降方案都缺乏實用價值,升力發動機或者風扇佔據了太多機體空間,導致航程和載彈量小得可憐,僅有鷂式和蘇聯的雅克-38達到量產階段。(跑題寫了這麼多垂直起降飛機的研發歷史,只是想説明和現在軍迷熟知的量產機型相比,世界航空業曾經探索過的方案要豐富得多。)
垂直起降難度過大,美國空軍退而求其次發展短距起降技術,而且最好能在不犧牲過多性能的基礎上直接應用在現役戰鬥機上。1975年NASA蘭利研究中心成立了一個聯合工作組開始研究二元推力矢量噴管,1977年起與麥道合作將該技術集成到剛服役一年的F-15上。通過研究和風洞試驗建立了美國最大的先進尾噴管技術數據庫,為日後二元推力矢量噴管的應用打下了堅實的基礎。
1984年美國空軍飛行動力實驗室和麥道簽署合同開發F-15 STOL/MTD短距起降/機動技術演示機,其目標是在惡劣天氣和強烈橫風條件下無需地面導航系統幫助從被炸彈損壞的短距離濕滑跑道上起飛。
麥道改裝了預生產型TF-15A的1號機(71-0290號),也就是第1架雙座型F-15(第6架下線的F-15)。1971財年採購的該機在此之前被用於F-15E的航電設備測試台,2號機71-0291號則是F-15E的作戰能力演示機,也就是真正的原型機。因為這兩段測試機經歷,0290號在改裝時被發現翼盒整體縱梁存在高強度使用造成的金屬疲勞問題,麥道用更輕、性能更好的鋁鋰合金更換了翼盒,這也是鋁鋰合金首次應用於飛機關鍵結構。
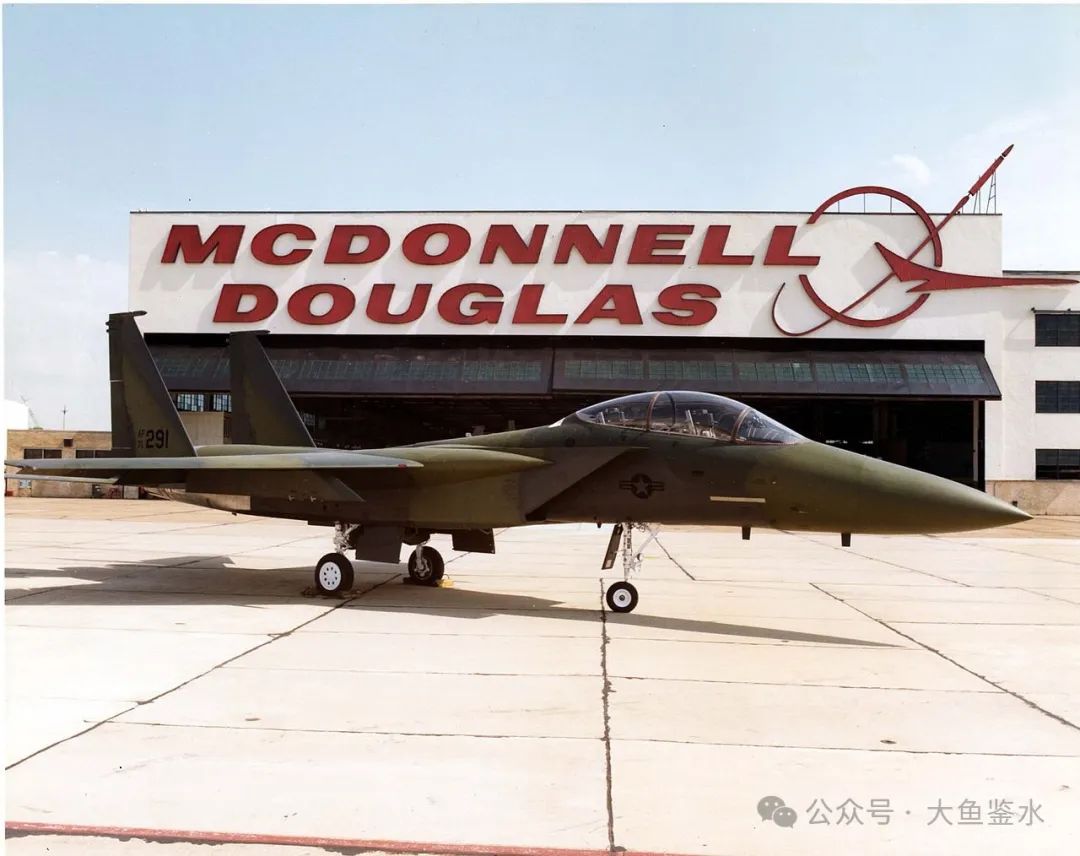
> F-15E原型機,不安裝保型油箱的話和F-15B/D的外觀幾乎沒有區別
F-15 STOL/MTD採用的技術基本都是蘭利研究中心提供的,它安裝了一對帶上反角的大型全動鴨翼,主要作用是用於配平尾部的矢量推力,同時增大機體前部升力幫助抬頭縮短滑跑距離。鴨翼兩側差動時可以控制滾轉,聯動則控制俯仰。為了節省經費,這對鴨翼的設計基於同公司F/A-18的平尾。

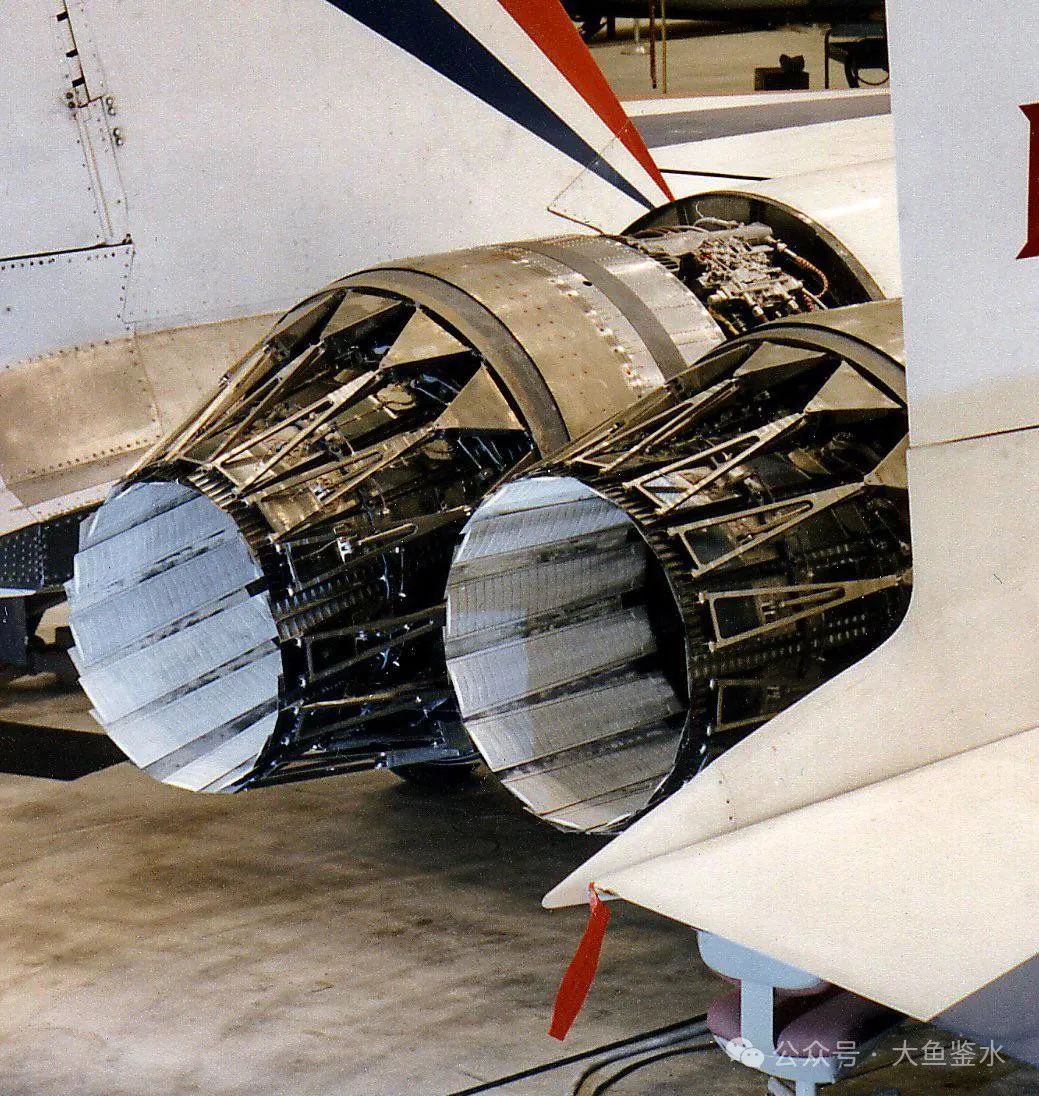
機尾換裝二元矢量噴管,它和F-22上的不同,是一個矩形的黑盒子形狀,完全沒有考慮隱身性能,和機體的過渡也不圓滑。除了可以上下偏轉,着陸時還可以將噴流翻折向前當作反推,縮短滑跑距離。

> F-15 STOL/MTD的尾噴管

> F-22地面試車中的尾噴管
該機於1988年9月7日首飛,不過直到1990年3月23日才首次測試二元矢量噴管。鴨翼配合矢量噴管令F-15 STOL/MTD能以68公里/時的低速起飛,起飛滑跑距離縮短25%。開啓反推後着陸滑跑距離從2300米縮短到500米,該功能還可以在空中使用,格鬥時能夠迅速減速。升級自F-15E的飛控系統可以精確協調鴨翼、矢量噴管和方向舵的動作,帶來極為出色的機動性,試飛中能輕鬆飛出85度的高攻角。

該項目在1991年8月達到所有飛行研製目標後終止。此時冷戰已經結束,來自蘇聯和華約的軍事壓力煙消雲散,主力戰鬥機短距起降的需求降低,STOL/MTD技術沒有實用化。

> F-15短距起降改型服役狀態的設想圖
之後該機被選中改裝為集成飛行器先進控制技術(ACTIVE)驗證機,用於研究隨控佈局、矢量機動等先進飛控技術。NASA於1993年將其借用,保留了鴨翼,換裝了普惠公司研製的P/YBBN三元矢量俯仰/偏航平衡梁噴管,升級了飛控系統中的高級控制邏輯程序。
F-15 ACTIVE的試飛項目從1993年持續到1999年,在1996年10月31日首次測試了三元噴管的推力矢量控制,最高速度達到1.95馬赫。上述兩個項目所驗證的矢量噴管和飛火推一體化控制技術日後被應用於F-22。

1999年到2008年間,0290號機參加了智能飛行控制系統(IFCS)項目,旨在開發一種利用可自我訓練的神經網絡技術識別/分析飛機特性的飛控系統,以優化飛行性能。2006年到2007年,該機還被用於探索通信和導航系統(SBRDC/ECANS)計劃下的空間靶場演示和認證項目。這架垂尾上曾繪有“敏捷鷹”標誌的F-15驗證機可謂功勳卓著,成為退役前飛行時間最久的一架F-15。
羅克韋爾-MBB X-31

F-15 ACTIVE是美國空軍研究推力矢量控制和先進飛控系統的試驗項目,美國海軍也有類似計劃,這就是美國眾多X系列試驗機中第一個國際合作項目X-31。該項目屬於美國德國聯合增強戰鬥機機動性計劃的一部分,由美國海軍航空系統司令部主導,NASA蘭利研究中心和德萊頓飛行研究中心支持,委託羅克韋爾和德國MBB(梅塞施密特的繼承者)聯合研製,美國空軍飛行測試中心也參與了測試。
X-31以羅克韋爾之前研發的SNAKE驗證機為原型,後者最初的氣動佈局則來自HiMAT驗證機。

> 羅克韋爾SNAKE模型
隨着MBB的加入,德國方面希望將颱風戰鬥機早期方案的設計融入其中,不過兩者差異太大沒法兼容。於是拿到德國投資後羅克韋爾基本上推倒原方案重新設計了一遍,讓它看起來更像颱風,德國人也很高興。
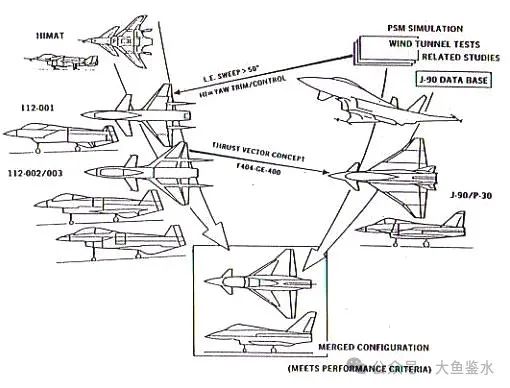
> X-31設計演化過程,左側是羅克韋爾的方案,右側是MBB的J-90/P-30方案
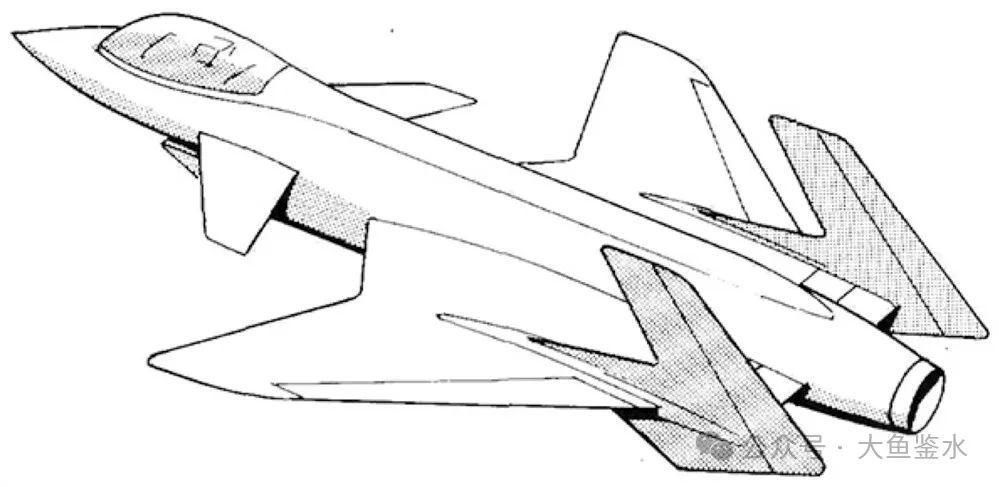
> MBB早期方案之一採用了前略翼,連垂尾也是前掠的
為了減少開發時間和風險大量採用了現成設計和部件,包括颱風原型機EAP的鴨翼構型和機腹進氣道、F/A-18的前機身和發電機、F-16的起落架、燃油泵、前輪胎和APU、V-22魚鷹的氣動面驅動系統、塞斯納獎狀的主機輪和剎車、B-1B的小翼主軸。

X-31可以看作是一架縮小版的颱風戰鬥機,採用遠距耦合鴨翼和無尾三角翼佈局,俯仰和滾轉主要由全動鴨翼控制,主翼為雙三角翼(颱風早期設計也是如此,後來改為標準三角翼)。
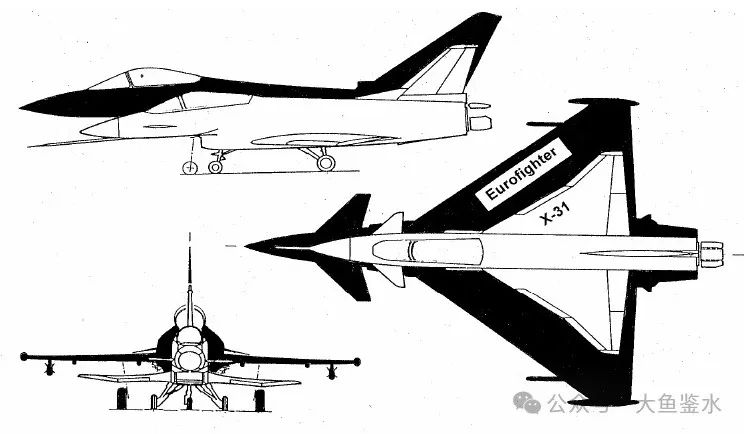
> X-31(白)和颱風戰鬥機(黑)的尺寸對比
該機為F404-GE-400渦扇發動機配備了三葉式碳-碳材料推力矢量噴管,可以長時間承受1500度高温。

因為飛行攻角非常大,常規皮托管空速管難以收集準確的大氣數據,X-31專門安裝了一具下彎10度的基爾探頭,它沒有加熱裝置,也為後來1號機的墜毀埋下了隱患。

X-31製造了2架,於1990年10月11日首飛,從1990年到1995年間共試飛了500多次,通過鴨翼和推力矢量的配合實現了70度的受控大攻角飛行,並以過失速機動完成了最小半徑180度快速轉彎,飛行速度遠遠超出了任何傳統飛機的空氣動力學極限,這項革命性機動被稱為“赫布斯特機動”。

為了進一步拓展X-31飛控系統的潛力,1994年該機安裝了新的飛控軟件,模擬無垂尾構型下的超音速穩定性,該軟件允許飛機控制率逐步實現失穩,直至模擬100%無尾的目標。試飛中先後模擬了1.2馬赫和亞音速下失去部分垂尾到完全無尾的狀態,這也是航空界對無尾佈局機動性的最早探索。****

> X-31無尾構型的電腦效果圖,實機並未拆除過垂尾
1995年1月19日,1號機因基爾探頭的皮托管結冰發送錯誤空速數據在愛德華茲空軍基地附近墜毀。****
X-31項目的開始時間早於空軍的F-15 ACTIVE項目,當時空軍和海軍還分別在F-16及F/A-18上測試矢量噴管。

> 1994年3月15日,X-31和F-16 MATV、F-18 HARV驗證機編隊飛行。
90年代後期,美國和德國繼續推進VECTOR項目,試飛證明X-31的慣導/GPS系統可以達到精確引導飛機自主起降的釐米級精度,並實現了有人駕駛飛機的大攻角(24度)短距自主着陸。****

洛克希德JAST-LSPM

現代戰鬥機越來越複雜,研發週期也越來越長。F-22從1981年ATF先進戰術戰鬥機項目啓動到1997年首飛用了16年時間。F-35項目耗時更久,它的起源是1983年DARPA為美國海軍陸戰隊和英國皇家海軍開發鷂式超音速替代機型的先進短距起飛/垂直降落(ASTOVL)項目,到2006年首飛經過了漫長的23年。期間經歷了3個大的階段,光是項目名稱就更改了6次,設計方案更是百花齊放,洛馬一家就開發了超過25種構型,其中至少有7種採用了鴨翼。
在第一階段洛克希德的ASTOVL方案就是一架空重11噸的單發鴨翼佈局無尾三角翼雙垂尾垂直起降艦載戰鬥機,它採用肋部半圓形進氣道,正面竟然有點陣風戰鬥機的模樣。

> 洛克希德在1988年5月推出的ASTOVL方案
ASTOVL於1993年更名為通用經濟型輕型戰鬥機(CALF)項目。此時冷戰已經結束,美國國防開支大幅削減,並行開發的另外兩個新型戰鬥機項目:空軍的多用途戰鬥機(MRF)和海軍的先進攻擊/戰鬥機(A/FX)被取消,合併為聯合先進打擊技術(JAST)項目。因為其概念和ASTOVL/CALF一致,1994年CALF也被整合到JAST之中,陸戰隊、空軍、海軍各自的輕型戰鬥機項目三合為一,將替換F-16、F/A-18和AV-8B。
JAST的目標並不是製造實機,而是完善一系列下一代戰機將使用到的先進技術,屬於預研階段,因此參與競標的波音、洛克希德和麥道都只製造了一架無人的大尺寸動力模型(LSPM),並送往NASA Ames研究中心進行懸掛垂直起降測試。

> 波音方案的LSPM

> 麥道/諾格/BAE團隊方案,採用蘭姆達翼,後機身有明顯的YF-23印記
洛克希德臭鼬工廠提出的5個方案全部採用鴨翼,最後一個C-160製造了LSPM模型。它為真實戰鬥機比例的3/4,裝有升力風扇(沒蓋板),能看到很多F-22的設計,包括加萊特進氣道和梯形的外傾垂尾。


> 洛克希德JAST-LSPM
1995年洛克希德和馬丁公司合併組成洛馬,同年JAST被更名為聯合攻擊戰鬥機(JSF)項目,旨在製造概念演示機進行對比飛行。麥道、諾格、洛馬和波音參與競標,英國作為唯一的一級合作伙伴加入JSF。
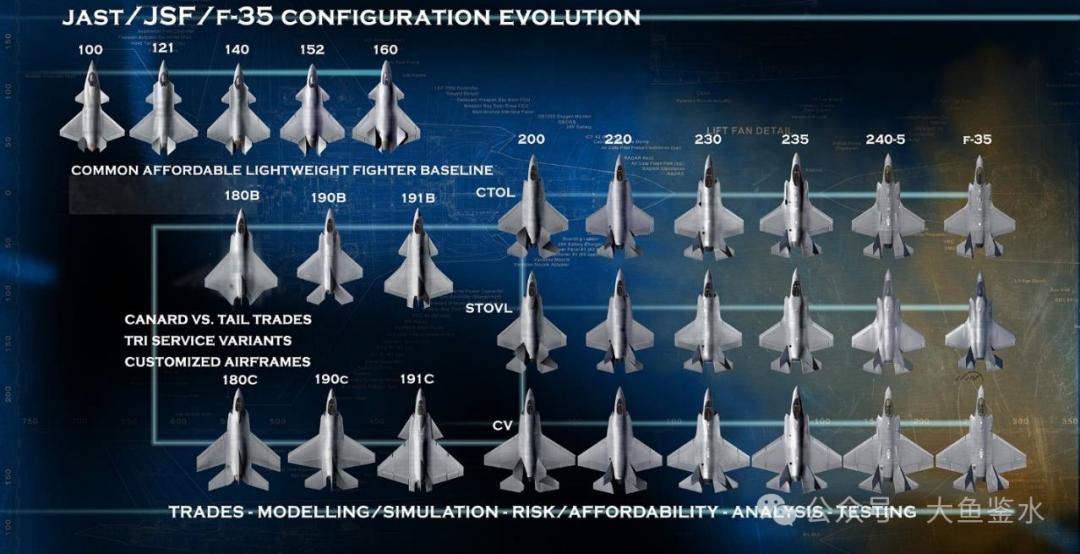
到1997年初,波音和洛馬勝出進入下一個概念演示階段(CDP),洛馬又開發了8個方案,開始應用DSI鼓包進氣道。其中C-191B和C-191C為鴨翼單垂尾構型,從C-200開始基本確定了日後F-35的常規佈局。

> C-191模型,鴨翼和機翼可更換,以展示岸基型和艦載型的不同翼面尺寸
競標中麥道被淘汰,諾格和BAE加入了洛馬團隊。2001年洛馬的X-35中標,進入系統開發於演示(SDD)階段,JSF被命名為F-35。這個編號是JSF項目經理霍夫少將在宣佈現場確定的,它並不符合國防部的標準編號順序,這甚至讓洛馬感到意外,因為他們原本預計的編號是F-24。
麥道X-36

麥道幻影工廠與NASA從1989年開始合作開發戰鬥機低可探測性和敏捷性技術,基於大量風洞試驗和計算流體動力學分析的積極成果,麥道於1993年提出製造遙控技術演示機在真實飛行環境中驗證先進技術。1994年,麥道幻影工廠使用快速成型技術按照常規戰鬥機尺寸的28%比例製造了2架縮比無人駕駛驗證機,命名為X-36,NASA和麥道各出資50%。它的機長只有5.5米,翼展3.18米,空重僅494公斤,最大起飛重量576公斤,最大速度450公里/時,升限6200米。

> 從這張首飛前在愛德華茲空軍基地幹湖湖牀上進行準備的照片可以看出它的尺寸非常小
X-36採用無尾佈局,旨在減輕重量、阻力和雷達反射面積,增大航程、機動性和生存力。取消垂尾和平尾後依靠鴨翼、主翼外側的開裂式阻力方向舵(和B-2/殲-36形式相同)以及二元推力矢量噴管提供飛行控制。

> 相對尺寸巨大的鴨翼

> 尾部特寫,從外至內分別是開裂式阻力方向舵、副翼和矢量噴管
飛行員在地面配有移動地圖的模擬座艙中操縱,由座艙蓋上安裝的攝像機提供視野,機載麥克風反饋飛行噪音,因此無需在機上安裝複雜昂貴的自主飛行控制系統。由於在俯仰軸和偏航軸上都不穩定,該機安裝了基於商用組件開發的先進單通道數字電傳操縱系統來穩定飛機。

> 遙控駕駛艙,以今天的標準看非常簡陋
X-36機頭呈楔形,折角稜線向後延伸到加萊特進氣道上緣。頭錐、機頭折角和進氣道外側折角構成三組渦流發生器。全動鴨翼呈梯形,主翼採用了蘭姆達翼型,三角形矢量尾噴管形狀和B-2的海狸尾相似。

X-36的前機身包括座艙蓋的外形和麥道JAST非常接近,也有YF-23的影子,連鴨翼的翼型都和YF-23的菱形主翼接近,這是因為YF-23是諾斯洛普和麥道合作開發的。

順便看一下先進戰術戰鬥機(ATF)項目在1981-1983年間信息請求(RFI)階段各大公司提交的方案,當時ATF有空優和對地攻擊兩種任務需求。空優任務構型中麥道、波音和格魯曼的方案全部採用鴨翼,羅克韋爾2個方案中的1個是鴨翼,洛克希德方案是以SR-71為基礎的,有1對伸縮鴨翼,全部12個方案中有8個採用了鴨翼。

對地攻擊任務構型中格魯曼、波音和洛克希德的鴨翼方案與空優構型相同,但重量略大,7個方案中有3個鴨翼。這些早期方案完全看不到YF-22和YF-23的身影,大多數比它們更前衞、更科幻。
回到X-36,該機於1997年5月首飛,到11月(麥道於當年8月併入波音)完成了31次試飛,在高滾轉率、低速/高攻角、高速/低攻角等複雜姿態下進行了測試,累計飛行時間15小時38分鐘。試飛表面X-36的操控性極佳,“非常穩定且機動性強,在速度範圍的兩端都操控良好”,達到甚至超過所有設計目標。

> 首飛的場景,可以看到二元矢量噴管排出的扁平氣流
1998年底,美國空軍研究實驗室與波音簽訂合同,重啓X-36進行了2次無尾戰鬥機可重構控制 (RESTORE) 軟件的試飛,以驗證機器學習軟件如何彌補飛行中飛行控制面(襟翼、副翼、方向舵等)的損壞或故障,和X-36模擬無垂尾飛行類似,不過這會是真的沒有垂尾了。

> 2架X-36只有1號機進行了試飛,最終收藏於空軍國家博物館,機頭繪有33次試飛的標誌
X-36雖然尺度小得不起眼,但幾乎所有美國六代戰鬥機方案或多或少都應用了它驗證過的飛控技術和氣動設計,在航空發展史上具有重要意義。

> 1997年7月16日在Dryden飛行研究中心拍攝的NASA研究機隊全家福,從左到右順時針依次為X-31、F-15 ACTIVE、SR-71、F-106、F-16XL、X-38、無線電控制母機和X-36,這張圖上有鴨翼的3個型號都已經介紹了。
當然並不能説現在的F-47就是由它直接演變來的,一是時間跨度長達28年,這期間航空技術已經發生了巨大的變化;二是X-36只有機頭部分和F-47有些相似,鴨翼和主翼都完全不同,最終定型的F-47也不一定還保留鴨翼。

> CG愛好者製作的NGAD各種方案合集
格魯曼F-14

作為鐵桿貓黨,有一架非典型性鴨翼機不得不提:F-14A在進氣道側面安裝有一個可伸縮的翼套小翼(Glove Vane),它的英文沒使用鴨翼這個詞,不過確實起到了鴨翼的作用。

這個小翼平時收納在翼套開縫中,在1-1.4馬赫之間飛行員可選擇手動打開小翼,以前端為軸向外弧形推出。但如果主翼後掠角小於35度,這對小翼將無法展開,因為這會導致低速狀態下的俯仰不穩定度過大。

> 收納狀態的翼套小翼
當速度達到1.4馬赫時(此時主翼處於大後掠角,升力中心後移帶來低頭趨勢)小翼會在大氣數據計算機的控制下自動展開,為機頭提供額外的抬頭力矩,減輕平尾的配平壓力,提高超音速機動性。在2馬赫時這個小翼可以幫助F-14A達到7.5G的過載。

> 伊朗空軍的F-14A打開了翼套小翼
這個伸縮設計確實非常精妙,但實際運作中美國海軍發現在2.25馬赫以下這對小翼的作用非常有限,徒增重量和複雜性。各個裝備F-14A的中隊在1988-1993間自行決定把小翼鎖定並拆除了驅動機構,B型和D型則在製造時就取消了小翼,空間安裝更多航電設備。

> 這4架F-14中下面2架打開了小翼,上面2架沒有
有一架F-14A還曾經在座艙前方安裝過一對可向上翻起的鴨翼,用於抬起機頭對抗尾旋。不過測試發現這個裝置和翼套小翼一樣沒什麼作用,也就沒有繼續開發。

除了上面提到的11個型號,還有一些機型在機頭也安裝了小翼但並不屬於標準的鴨翼,就不詳細介紹了。例如B-1B的小鬍子,學名是結構模式控制系統小翼 - SMCS Vane,源自70年代在YF-12A上測試過的擺動小翼,它根據機鼻和背脊上的加速計度數由飛控電腦自動控制,以“蜂鳥翅膀振動”般的高頻率朝機頭運動趨勢的相反方向偏轉,減輕飛機結構的振動,提高低空以地形跟隨模式突防時的飛行品質和穩定性。

首架F-16原型機YF-16(72-1567號機)在1975年底改裝為控制配置載具(CCV)驗證機,在進氣道下方安裝了一對垂直的全動小翼。它的尺寸足夠大,英文名稱是垂直鴨翼,但作用不是常規鴨翼的配平或者渦流耦合增升,而是在沒有推力矢量技術的年代通過電傳操縱系統主動控制氣動面提高機動性,所以也不算標準鴨翼佈局。

這種技術被稱為隨意靜態穩定性(RSS)技術,安裝獨立(解耦)控制面後成為隨控佈局飛機,可以在不改變飛行姿態的情況下改變航向或高度,比如爬升/俯衝/轉彎時機頭保持水平向前,或者在維持直線飛行的同時機頭偏離航向。CCV技術實際是已經完全融入現代戰鬥機的飛控系統中,但安裝獨立垂直控制面的僅有F-16 CCV和日本三菱T-2 CCV兩架驗證機。

> T-2 CCV的垂直控制面是單片的,位於機腹
鴨翼伴隨着飛機一起誕生,因為穩定性的缺陷被長期打入冷宮,經過不斷探索才在電傳操縱技術的加持下佔據了四、五代機的半壁江山。六代機時代鴨翼何去何從,是就此隱沒江湖還是重現輝煌,要看中國南北六代和F-47的對決了。
