全球首個人形機器人“拳王”出世,現實版《鐵甲鋼拳》上演_風聞
同壁财经-专业财经信息内容服务商1小时前
封面來源:電影《鐵甲鋼拳》
《CMG世界機器人大賽·系列賽》機甲格鬥擂台賽5月25日晚舉行,這是全球首個以人形機器人為參賽主體的格鬥競技賽事比賽。比賽採用積分制,共3回合,每回合2分鐘。擊中頭部、軀幹為有效擊打,手部動作有效擊打計1分,腿部動作有效擊打計3分。倒地一次扣5分,被擊倒8秒內無法起身則扣10分,本回合結束。由不同團隊操作的宇樹 G1 人形機器人進行了多輪對抗,並連續施展了側踢、膝踢、勾拳、組合拳等動作,最終,經過激烈的角逐,操作員陸鑫操控的AI策算師成為全球首個機器人拳王。這場賽事不僅是技術秀場,更是觀察機器人產業$機器人ETF(562500)突破的重要窗口。
一、賽事解讀:如何理解格鬥背後的技術含量?
1.格鬥動作拆解
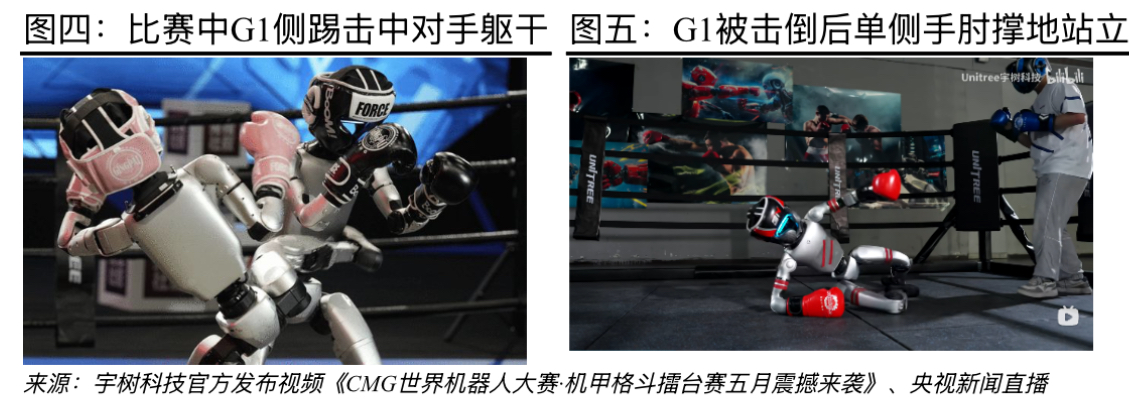
四月以來,宇樹科技在多個渠道發佈格鬥比賽的備戰準備視頻,預熱格鬥賽,讓人期待拉滿。根據備賽視頻和當天的賽事解説的信息,宇樹G1機器人已經能夠在立式沙袋、人機格鬥以及兩台人形機器人格鬥三大格鬥場景完成8套基礎格鬥動作和多個組合動作:
圖一:G1用右直拳擊打對手圖二:G1側身擺拳擊打沙袋圖三:G1右勾拳擊打沙袋

 來源:宇樹科技官方發佈視頻《Unitree 鐵甲拳王:覺醒!》《CMG世界機器人大賽·機甲格鬥擂台賽五月震撼來襲》
來源:宇樹科技官方發佈視頻《Unitree 鐵甲拳王:覺醒!》《CMG世界機器人大賽·機甲格鬥擂台賽五月震撼來襲》
上肢拳法:機器人G1能夠穩定使用左右手的直、勾、擺等不同拳法以及拳法組合攻擊目標,擊打目標時準確、力度大。
下肢攻守:攻擊上G1能夠膝踢、側踢擊打目標。防禦上,G1被擊中受到巨大沖擊時,能夠降低重心、小步後撤等動作不被擊倒並迅速恢復平衡;被踢倒後,G1可以採用“單側手肘撐地”的方式,快速站立恢復平衡。
2.“遙控”=“兒童玩具”?
本次比賽仍然需要操作人員即時操作機器人,這也引發了部分觀眾的質疑:這種“遙控”模式是否意味着人形機器人目前仍是一款“不智能”的“大號玩具”?對於這個問題,一方面是看到了人形機器人未來還有技術進步空間,另一方面忽略了“遙控”格鬥背後的技術含量和複雜系統:
• 感知系統:視覺傳感器、3D激光雷達、深度相機等部分,捕捉跟蹤對手位置距離,識別對手動作;
• 決策系統:基於強化學習把抽象的指令轉化為具體的邁哪條腿,哪個關節該如何轉動,如何維持所有系統的協調和平衡的策略方案;
• 控制執行系統:包括驅動電機、關節軸承、力/扭矩傳感器、線性執行器、絲槓等等硬件,將策略準確轉化為現實的物理動作。
完成上述格鬥動作是一個完整的系統工程,需要多個模塊架構完成多線程、高協同的協作。以比賽中的側踢動作為例,當操作者發出抽象的“側踢”指令後,感知系統需要在複雜環境中快速定位對手,尤其是在對手快速移動或遮擋的情況下,這對傳感器的精度和抗干擾能力提出了極高的要求;決策系統需要根據對手的動作和環境變化即時調整策略,這背後是複雜的算法和大量的數據處理;最後,控制執行系統需要精準控制全身關節的扭矩和運動軌跡,確保動作的準確性和力度。這一過程絕非傳統意義上“前後左右”的簡單“遙控”,而是高度複雜的技術協同。
同時,G1在格鬥比賽中也出現動作撲空、明顯劃痕的“意外”,暴露出了運動控制等方面的不足:
• 動態控制與即時感知:在動態對抗中,從傳感器捕捉對手位置到關節執行動作存在毫秒級延遲,導致揮拳時機偏差。特別是在快速移動或遮擋場景下,視覺和激光雷達數據可能出現噪聲,影響對手位置的即時定位。
• 抗衝擊性與多模態感知協同:G1的金屬外殼在比賽中遭到了外界的擊打,出現了比較明顯的“傷痕”。正如科技部國家科技專家、中國計算機學會智能機器人專業委員會委員周迪教授所説“G1的運動性能之所以不太受到這些‘皮外傷’的影響,除了是因為內部關節模組、電機等核心零部件的穩定之外,還與其算法的抗衝擊性、多模態感知協同等有關。格鬥中的碰撞和衝擊測試能暴露電機、傳感器等硬件的薄弱環節,推動抗干擾設計和材料升級。”
圖六:宇樹科技G1機器人產品參數圖七:比賽中G1收到擊打留下劃痕來源:Unitree宇樹科技官網、來源:央視新聞直播
整個格鬥場景的實現是一項多模塊協同的系統工程,當前精準鎖定單個技術突破口較為複雜,投資者可以關注通過$機器人ETF(562500)打包機器人產業機會。
二、從擂台到產業:技術突破如何撬動萬億市場?
有人質疑格鬥大賽是 “表演秀”,但歷史經驗表明,技術突破往往始於極限場景的探索 —— 正如 AlphaGo 推動深度學習普及,宇樹 G1 在擂台上驗證的多技術棧協同能力,正是人形機器人從實驗室走向產業化的關鍵跳板。民生證券認為,人形機器人板塊正從主題 投資邁向成長投資,2025 年有望成為全球量產元年。當前人形機器人產業已經進入“技術升級+場景成本突破+政策”三重驅動的正確循環:
1)技術基座升級:非具身大模型實現任務分解與規劃,具身大模型直接輸出高頻動作指令,AGI終極形態下機器人將具備單模型閉環、主動理解與強適應能力;
2)場景成本突破:特斯拉Optimus將率先導入超級工廠,車端供應鏈複用推動售價降至2-3萬美元,遠期規模效應下成本有望進一步下探;
3)政策密集催化:2025年政府工作報告首次將具身智能納入未來產業培育,地方政策圍繞技術攻關、產業集羣、應用示範三方面加碼,形成“中央定調-地方落實”的立體支持體系。
三、投資視角:如何捕捉產業紅利?
當技術突破遇見場景需求、政策東風,這場 “格鬥秀” 終將成為撬動萬億市場的支點,催生關鍵的投資窗口,作為全市場唯一規模破百億、流動性最佳、覆蓋中國機器人產業鏈最全的機器人主題ETF機器人ETF(562500)憑藉清晰的產業卡位與獨特的配置優勢,成為把握機器人時代的核心標的:
1. 資金流向驗證產業趨勢和資本共識共振
截至5月21日收盤,基金份額已達153.64億,最近三個月份額增長65.61億;基金規模達132.62億元,最近三個月規模增長43.71億元。最新資金淨流入1.45億元,最近三個月累計“吸金”64.16億元。數據印證資本對機器人產業的長期共識, ETF 通過打包機器人產業鏈龍頭,分散單一標的風險,實現產業紅利的高效捕捉。
2. 宇樹概念含量超 20%,精準卡位核心賽道
作為本次格鬥大賽的主角,宇樹科技代表了人形機器人技術的前沿水平之一。機器人ETF(562500)持倉股中,宇樹產業鏈相關標的權重超 20%,涵蓋感知系統、運動控制、核心零部件等關鍵環節。這一配置既聚焦技術突破的 “先鋒企業”,又兼顧產業鏈上下游協同,為投資者提供了 “押注技術黑馬 + 分享產業成長” 的雙重價值。
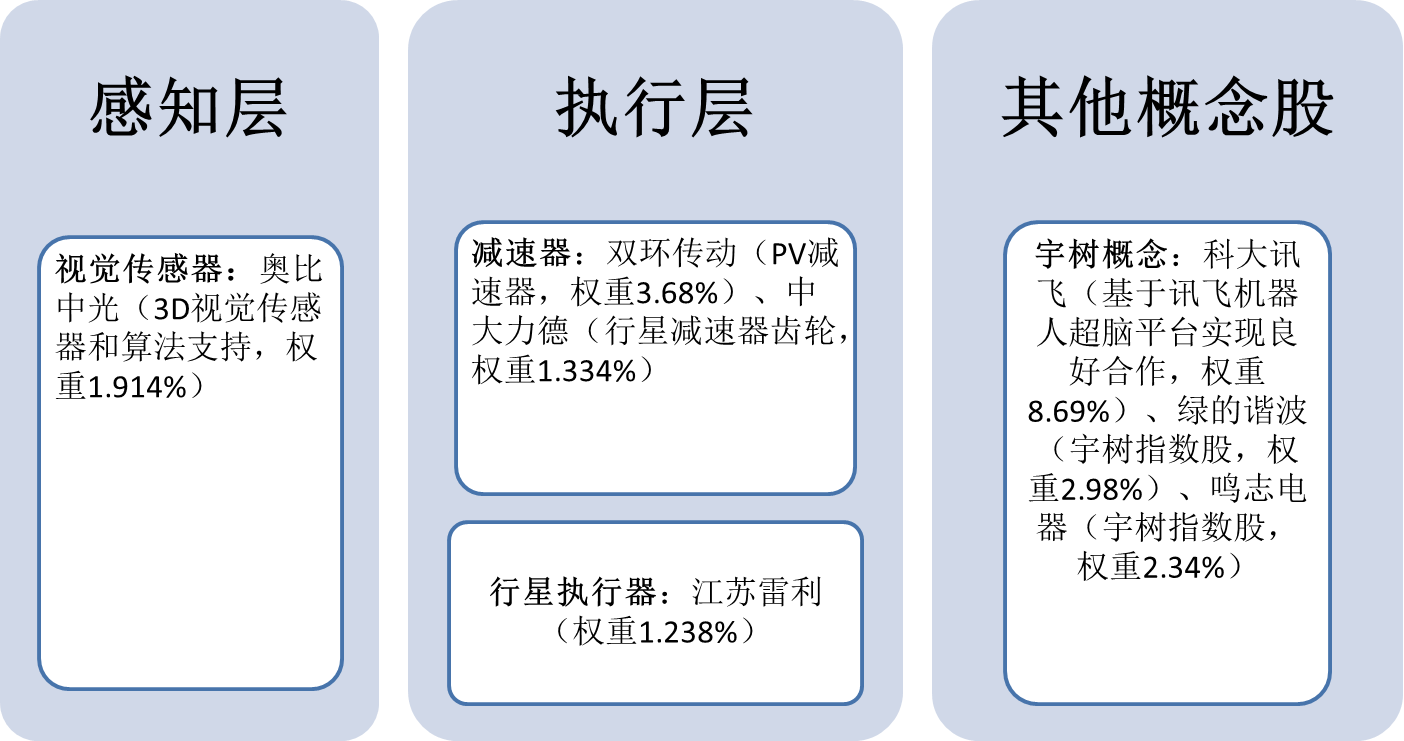
來源:各公司公告,包含宇樹科技供應鏈(含送樣)、戰略合作、wind宇樹指數成分
3. 關聯標的:科創人工智能 ETF 華夏(589010)機器人“大腦”
$科創人工智能 ETF 華夏(589010):聚焦機器人 “大腦”,科創板20% 漲跌幅 + 中小盤彈性,捕捉AI產業“奇點時刻”。
風險提示:以上基金風險等級為R4(中高風險)。以上基金屬於股票基金,風險與收益高於混合基金、債券基金與貨幣市場基金。個股不作為推薦。投資者在投資基金之前,請仔細閲讀基金的《基金合同》、《招募説明書》和《產品資料概要》等基金法律文件,充分認識基金的風險收益特徵和產品特性,並根據自身的投資目的、投資期限、投資經驗、資產狀況等因素充分考慮自身的風險承受能力,在瞭解產品情況及銷售適當性意見的基礎上,理性判斷並謹慎做出投資決策,獨立承擔投資風險。指數表現不代表產品業績,二級市場價格表現不代表淨值業績。本基金為ETF基金,投資者投資於本基金面臨跟蹤誤差控制未達約定目標、指數編制機構停止服務、成份券停牌等潛在風險、標的指數回報與股票市場平均回報偏離的風險、標的指數波動的風險、基金投資組合回報與標的指數回報偏離的風險、標的指數變更的風險、基金份額二級市場交易價格折溢價的風險、申購贖回清單差錯風險、參考IOPV決策和IOPV計算錯誤的風險、退市風險、投資者申購贖回失敗的風險、基金份額贖回對價的變現風險、衍生品投資風險等。
本資料不作為任何法律文件,觀點僅供參考,資料中的所有信息或所表達意見不構成投資、法律、會計或税務的最終操作建議,我公司不就資料中的內容對最終操作建議做出任何擔保。在任何情況下,本公司不對任何人因使用本資料中的任何內容所引致的任何損失負任何責任。市場有風險,入市需謹慎。