人類遙控機器人打格鬥!“大腦”不好?技術成熟還要5年_風聞
IT时报-《IT时报》官方账号-30分钟前

全球首屆人形機器人格鬥競技賽
作者/ IT時報記者****毛宇
編輯/ 錢立富****孫妍
北京亦莊的馬拉松賽事餘温未散,人形機器人又站在了浙江杭州的擂台上,打起了格鬥賽。
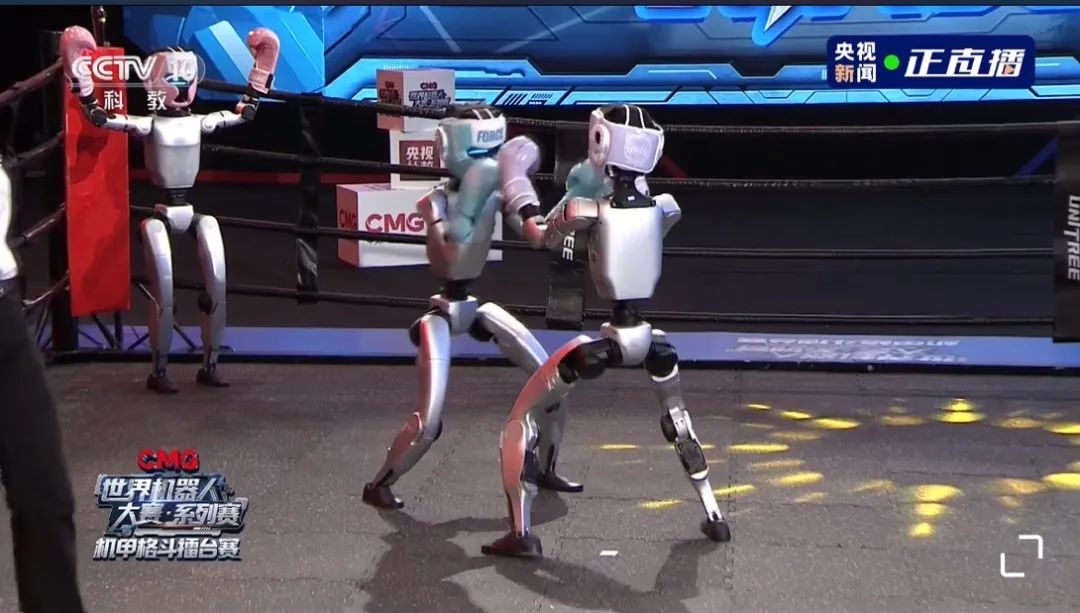
5月25日,“CMG世界機器人大賽·系列賽”機甲格鬥擂台賽拉開帷幕,這是全球首個以人形機器人為參賽主體的格鬥競技賽事,展現了人形機器人在運動控制、平衡能力等方面取得的新突破。
但《IT時報》記者觀察到,本次比賽仍以人操控手柄的遙控技術為主,比賽過程中除了考驗算法外,還要看操控者的反應力。
“可以將遙控和非遙控理解成機器人小腦和大腦,遙控技術只要做好小腦,而非遙控就需要搞定大腦,涉及視覺識別、狀態、定位以及參賽策略等諸多內容。”一位具身智能從業人士告訴《IT時報》記者,當前,遙控技術是讓人的大腦去控制機器人的小腦,從而讓人形機器人自如做動作。
多名業內人士向記者表示,在研發技術和時間成本的雙重壓力下,複雜場景下的非遙控技術或許還要等待5年以上。
“魯棒性”實現耐久性及穩定性
比賽現場,氣氛熱烈非凡。四支來自不同領域的戰隊操控着宇樹G1人形機器人登上擂台,展開激烈對抗。據介紹,“選手”宇樹G1身高1.3米,體重35公斤,擁有29個自由度,有着較為完整的動作流暢度與靈活性。
比賽採用積分制,分3回合,每回合2分鐘,擊中對手的頭部、軀幹為有效擊打,手部動作有效擊打計1分,腿部動作有效擊打計3分。比賽過程中,倒地一次扣5分,被擊倒後8秒內無法起身則扣10分,本回合結束。
賽場上,機器人展示出了直拳、勾拳、側踢、膝踢等多種格鬥動作,伴隨着金屬碰撞的聲響,拳拳到“鐵”。最終,操作員陸鑫操控的AI策算師獲得冠軍、“格鬥之星”稱號。

“機器人格鬥主要考驗的就是其運控能力的魯棒性。”上述從業人士表示,基於人工智能的運動控制算法,“魯棒性”正成為衡量性能的核心指標之一,即機器人在環境擾動、參數波動或突發衝擊下,能夠精準處理多關節協同運動,實現毫秒級響應,維持既定性能、完成任務目標的能力。
在本場格鬥賽中,魯棒性強調在複雜背景和不穩定光照下,機器人仍能保持性能一致,側重在存在多種干擾或模型參數未知情況下,輸出具有穩定一致性。

倒地後能否在8秒內快速起身,是這場格鬥賽事中至關重要的一項勝負評判標準,也是對人形機器人軟硬件技術的一次抗壓試驗。第三回閤中,粉色機器人被黑色機器人“重拳”錘倒在地,但未過3秒,黑色機器人被粉色機器人不小心絆倒,畫面十分有趣。但黑色機器人迅速調整腿部位置後,於5秒內起身。在另一回閤中,機器人被“重拳”擊打後,身體摔出圍繩,足部仍留在場內,但其很快找到平衡點,雙腿支撐後迅速起身站立。

即便遇到狀況百出,但機器人本體的“魯棒性”使其保持穩定性,不會因為摔倒或擊打在地出現故障,還能通過動態平衡算法在短短幾秒內自主站立。
機器人機身材料的選擇也對這場比賽至關重要。高工機器人產業研究所所長盧瀚宸告訴《IT時報》記者,當前機器人採用了低密度和輕量級的碳纖維骨架與鋁合金材料,在減輕機器人重量的同時,也保障其結構強度。
從細節來看,髖、膝、肩等關節使用了高扭矩密度電機與精密減速器,支持爆發性動作,如勾拳、踢腿等;脊柱與仿生結構則利用了剛柔耦合設計以吸收衝擊力,同時提升抗衝擊能力;足底六維力傳感器能實現毫米級壓力檢測,以維持動態調整步態避免滑倒。可謂,全身上下,無一“廢料”。
“大腦”成熟尚需3至5年
這場比賽引發外界廣泛關注,其中,手柄遙控機器人成為熱議話題。《IT時報》記者發現,比賽現場,操作者站在場外對機器人進行手柄和語音的雙重操控。
當下,遙控技術與非遙控技術之間存在明顯區別。不久前,成都人形機器人創新中心發佈了全國首個無需遙控的、自主完成跨空間人形機器人任務規劃推理執行系統Raydiculous-1,標誌着人形機器人在“大腦”技術上取得新突破。據悉,該系統在執行大空間任務時擁有長視野推理規劃能力,同時具備自主學習、處理跨場景任務的特性。
但從行業整體來看,要實現複雜場景下(如動態格鬥等)的完全自主控制,人形機器人的“大腦”開發面臨諸多挑戰,即時感知與決策算法的能力不足是當前非遙控技術面臨的核心難點之一。
“遙控操作依靠操作員控制機器人的‘小腦’,讓機器人作出相應的動作。操作員需要即時判斷場上形勢,並通過控制器將指令傳遞給機器人。”上述從業人士表示,“小腦”的控制尚好實現,但“大腦”即非遙控的實現則要複雜得多,這要求機器人具備即時環境感知、意圖識別和動態決策能力,涉及視覺識別、狀態估計、即時定位以及比賽策略制定等諸多方面。
“還要求機器人能夠即時處理多模態傳感器融合(如視覺、IMU、力傳感器)的數據,在毫秒級時間內完成複雜環境建模和攻擊路徑預測,但目前的數據處理效率還難以滿足這一要求。”盧瀚宸表示。
在硬件要求上,非遙控的自主控制須具備更高算力的邊緣計算芯片和冗餘傳感器網絡,這使得成本顯著增加。例如,高精度傳感器(如激光雷達、六維力傳感器)、AI芯片等都是主要成本項。其中,AI芯片模塊佔控制系統成本大頭,六維力傳感器的高成本也阻礙其規模化應用。
動態平衡控制同樣面臨挑戰,自主控制須協調全身關節力矩與地面反作用力,現有算法針對極端干擾(如被擊打、地形突變)的魯棒性不足,仍須依賴人工干預調整姿態。此外,數據驅動的學習也存在瓶頸,人類運動數據難以完整採集,強化學習需大量試錯訓練,導致自主決策模型泛化能力有限。
“未來3至5年,機器人有望實現獨立行走、奔跑等基礎非遙控技術。”盧瀚宸樂觀預計,而複雜場景的完全自主控制需要等待更久時間才能成熟。
“我們可以將‘小腦’及其硬件類比成一輛智能汽車,加上‘大腦’就好比給車配置了智能駕駛功能,輔助駕駛保持定向巡航並不是難事,但帶有高精地圖的智能駕駛甚至無圖駕駛則需要更高的算法和技術。”上述業內人士表示,“大腦”的研發、硬件和時間成本都明顯高於“小腦”,很難計算出具體的成熟時限。
排版/ 季嘉穎
圖片/ 央視頻
來源/《IT時報》公眾號vittimes