輔助駕駛出海、具身智能落地,稀缺的3D數據從哪裏來?_風聞
HiEV大蒜粒车研所-HiEV大蒜粒车研所官方账号-08-29 08:16
作者 | 德新
編輯 | 王博
3D數據領域的ImageNet
十幾年前,當時在普林斯頓大學任教的李飛飛,意識到數據的稀缺是人工智能發展的主要瓶頸。於是從2009年開始,她和團隊蒐集了互聯網上數十億張的圖片,創建了一個龐大的覆蓋全球的視覺分類數據庫,併發起了一項比賽——ImageNet Large Scale Visual Recognition Challenge,簡稱ImageNet挑戰賽。
再隔了3年後,來自多倫多大學的Geoffrey Hinton帶領他的學生團隊用深度學習模型AlexNet贏下了2012年的挑戰賽,這讓學界和工業界廣泛意識到深度學習在圖像識別乃至整個人工智能領域的巨大潛力。可以説,ImageNet是深度學習和人工智能真正爆發的起點。Hinton也因此拿了2024年諾貝爾獎的物理學獎,這是後話。

李飛飛,圖片來源:StanfordHAI
如今,AI正在從互聯網圖像、語音的處理,進入到自動駕駛、機器人這些與物理世界強相關的領域,就像當年2D的圖像數據稀缺一樣,3D空間數據也成為算法發展高度稀缺的資源。無論自動駕駛還是機器人領域的頭部公司,都在廣泛地尋找用於模型訓練迭代的數據資源。
就在前兩天,一家新的3D數據公司ROVR,在北美的ADAS與AV技術峯會上,與UC Berkeley、清華大學宣佈開源了一批3D數據。第一批開源的數據包含1400個Clips,共20萬幀,包括點雲、GPS、RTK、IMU等多維度信息,並且覆蓋歐洲、北美、東南亞等不同地域,包含動態以及靜態的目標,以及左行、右行、高速、城區、鄉村、雨天、夜間等不同的場景。
ROVR團隊告訴我們,開源這批數據只是一個小的開端,他們的目標是打造全球最大的開源3D數據集。在輔助駕駛與具身智能快速發展,世界模型、VLA等新技術層出不窮的今天,有價值的3D數據,無疑像火箭燃料一樣是助推技術發展的關鍵資源。

3D數據為什麼高度稀缺?
AI時代,數據成為模型算法訓練的基礎,只有複雜多元的數據,才能真正意義上提高模型的泛化能力,但今天業界公開的3D數據遠遠不夠。
近幾年業界比較知名的幾大3D數據集,如nuScenes、KITTI、Waymo Open Dataset等,這些數據集當下已經有些「滯後」。
一部分的數據集早期在發起時有一定的大公司PR需求,已經有幾年不更新了;其次,針對關鍵的深度信息,其激光雷達點雲大部分使用的是前幾年的機械式激光雷達,和今天量產的車規級激光雷達從特徵上不一致;再者,KITTI以德國等地區的數據為主,Waymo Open Dataset則是以Waymo早期在美國舊金山、鳳凰城採集的一些數據為主,這些數據都有地域侷限。
因此這些數據集對研發已經沒有真正的價值。
無論是輔助駕駛出海,還是世界模型的訓練,今天都希望找到全球化的、具有廣泛多元特徵的數據。技術最先進的特斯拉,也在瘋狂地渴求目標地域的數據。甚至應該説,技術越先進的公司,時下對高質量數據的需求越強烈。
在過去,高精度的3D空間數據要麼不存在,要麼非常昂貴。
地圖廠商曾經是這樣一類數據的提供商,但圖商的業務模式為車企服務定製的,一方面價格較高,另一方面由於車企本身的地域特徵,圖商的業務也是地域化的。
而近兩年隨着國內輔助駕駛的大規模量產,推動了硬件供應鏈大幅度的成熟,這時候解決全球化的3D空間數據供給逐漸顯現出眉目。

如何解決覆蓋全球的3D空間數據?
ROVR是一家從創辦之初就高度全球化的公司,目前其有近20人的團隊。
在創辦將近1年的時間裏,其推出了兩款產品TX(Tarantula X)和LC(LightCone),目前這兩款設備在海外大概有近2000台的部署量,由此ROVR積累了超過2300萬公里的數據,這些數據主要分佈在歐洲、北美以及東南亞地區,不包括中國市場。
2300萬公里這個數據是什麼概念呢?
可以對比一下Waymo到2021年,差不多花了12年時間累計測試了2000萬英里。並且ROVR預計,到今年底其活躍設備總數能達到5000台,里程數據則能達到6000萬公里級。

TX,圖片來源:企業官方
其推出的兩款產品,TX是一款RTK接收器,並通過手機相機收集道路數據,追求更高的覆蓋度和鮮度。其獲得的高即時性道路數據,可以服務於SD地圖、HD地圖的更新和情報發現,能為地圖公司更新提供更好的數據源。
LC是一款更高精度的設備,其集成了IMU、ADAS相機、車規級固態激光雷達,也配備了釐米級RTK服務。除了建圖、檢測、目標分割外,LC採集的數據,還能很好地支持單目深度估計任務的訓練。
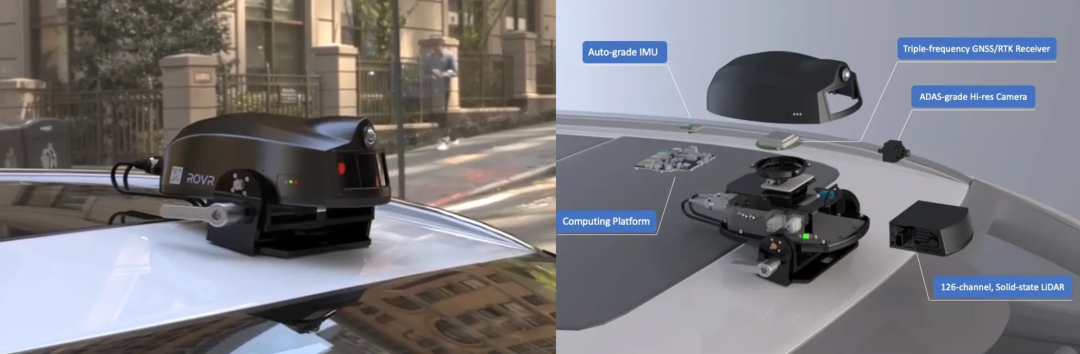
LC,圖片來源:企業官方
ROVR的CTO Yuan Si告訴我們,TX這級的產品由於配置了釐米級的RTK,在當前市場上幾乎找不到同等精度精度的同類數據源;後者應該也是當前市面上唯一的量產激光雷達採集設備。
為什麼呢?
因為高精度RTK服務非常昂貴,大部分的眾源設備(如後裝一體機),出於成本考量沒有搭載高精度的RTK。如果採用GPS的話,在好的情況下其數據精度偏移也在1 - 2米級。
RTK能夠做到靜態5釐米級的精度。ROVR有一家非常深入的合作伙伴在運營全球性的RTK服務網絡GEODNET,這家公司同時也是ROVR的股東,因此其能以較低的成本使用RTK服務。GEODNET在全球有2萬多個基站,覆蓋了近150個國家和地區。
而大規模量產的車規級激光雷達,經歷了過去幾年的激烈競爭,來自中國的供應商佔據了這一市場,由此ROVR藉助國內的供應鏈優勢實現了LC的量產。
目前ROVR的採集設備,主要包含3類的採集者,個人網約車司機、商用車或者客運車隊的車隊主,以及技術愛好者。ROVR也會通過向數據需求旺盛的區域定向投放激勵的方式,來激勵和引導數據的採集。
在海外市場,實際上3D數據的需求一直存在,但一直沒有被滿足。地圖公司過去大部分的情報數據只有圖片,而帶有結構化信息、帶點雲的高精地圖成本太高。
當前在中國的車企以及一些科技公司都在謀劃輔助駕駛方案出海,針對中國道路與海外道路的差異:
「中國的道路里程很長,和美國相當;主要的區別在於不同的交通標識,比如車道線、交通標識牌的設置。另一方面在於交通參與者的不同,比如歐洲對於排放要求較高,市區內大貨車的比例,要比中美少很多。更多是小排量的兩門車。還有一部分是道路質量的不同,中歐大部分是瀝青路面,駕駛條件較好。美國道路條件差一些、坑窪很多,鄉間道路也很多。」Yuan Si説,「這也會給很多車企帶來比較大的出海適應成本,我們希望助力中國企業出海。」
目前,以時長30秒覆蓋約1公里的數據包為例,ROVR提供給車企的成本大約是傳統數據的1/10的價格。
「ROVR的目標就是要把大規模覆蓋的高精數據成本打下來。」
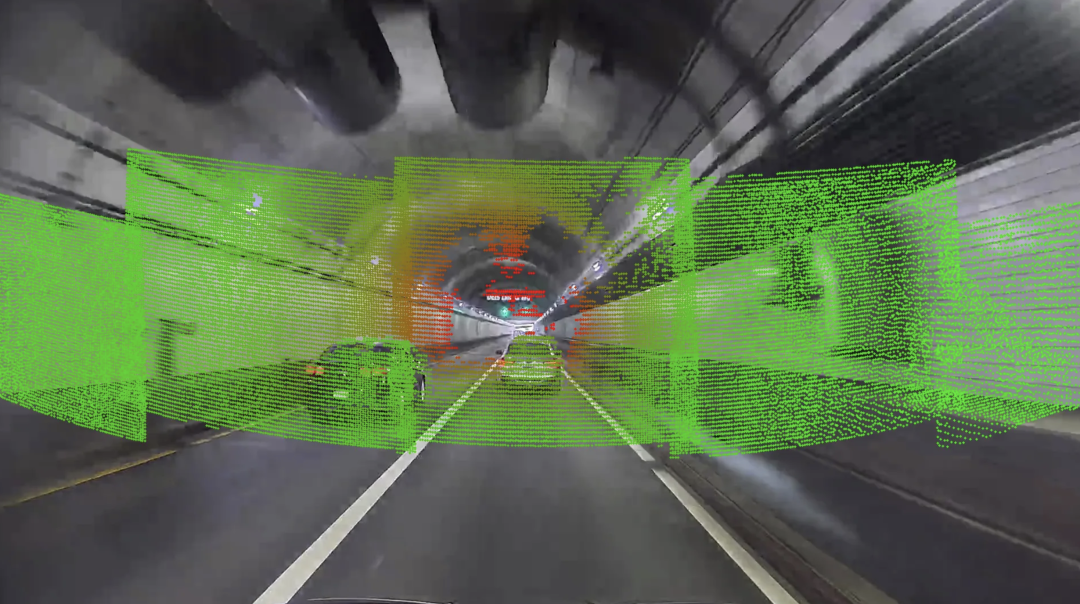
ROVR數據示例,圖片來源:企業官方
同時,定位海外市場的3D數據平台,ROVR也會嚴格遵循當地的合規要求。Yuan Si向我們介紹,目前其海外的數據合規大體會分三個階段:
第一,在採集階段對個人信息進行脱敏,並且對敏感區域設置地理圍欄限制採集;
第二,所有的數據通過加密傳輸的,保證數據即使被抓取也無法破解;
第三,遵循GDPR的要求,數據本地採集、本地存儲,不存在數據跨境的情況。

從自動駕駛到具身智能
ROVR目前的團隊,絕大部分是來自自動駕駛、地圖以及互聯網大廠的背景。
CEO Guang Ling,先後在中興、騰訊以及一家頭部激光雷達公司任職,從2016年開始見證了整個自動駕駛行業的發展,並且兼具有大型軟件、高性能計算以及自動駕駛硬件等領域的經驗和國際視野。
CTO Yuan Si則前後在四維圖新、百度等大型圖商任職,曾經深度參與多家國際車企在中國和海外市場的地圖項目。團隊還有一位負責海外市場的CEO,是IMU發展史上的一位重要人物**,在定位和RTK領域有極深的造詣。**
尤其團隊在自動駕駛領域的積累,使ROVR在硬件、數據產品設計等環節都有豐富的經驗。
第一批的採集硬件在今年4月發貨後,在全球市場惡劣的環境下使用,目前沒有一例返修案例。由於都是自研設備,這樣能保證全球採集數據的傳感器、配置以及數據格式統一;目前其針對採集數據的脱敏、自動化標註等主要算法,也都是內部自研的。
今年除了繼續提高兩款產品的發貨量之外,ROVR還在着手研發第三款產品,是一款針對室內的機械臂產品預計在今年底明年初發布,這款產品會將團隊的數據產品從室外拓展到室內,也將從輔助駕駛邁向具身智能。
