國際首個!我國腦機接口取得新突破
guancha
記者17日從天津大學獲悉,該校腦機海河實驗室和清華大學集成電路學院聯合,開發出一款基於憶阻器神經形態器件的“雙環路”無創演進腦機接口系統。同時,團隊還首次揭示了大腦電信號與解碼器在交互過程中如何進一步協同增強的奧秘,併成功實現了人腦對無人機的高效四自由度操控。相關成果刊發在國際學術期刊《自然·電子》上。
天津大學供圖
腦機接口能實現大腦與機器直接信息交流,促進生物智能與機器智能融合,被公認是新一代人機交互和人機混合智能的核心技術。如何通過腦機之間的信息交互實現“互學習”,進而促進腦機智能的協同演進,是突破腦機性能瓶頸的重點和難點。“但目前腦機交互過程中大腦與機器的動態耦合機制尚未釐清,導致腦機之間的長時程互適應能力較弱,工作性能隨時間下降嚴重。”天津大學腦機海河實驗室許敏鵬教授説。
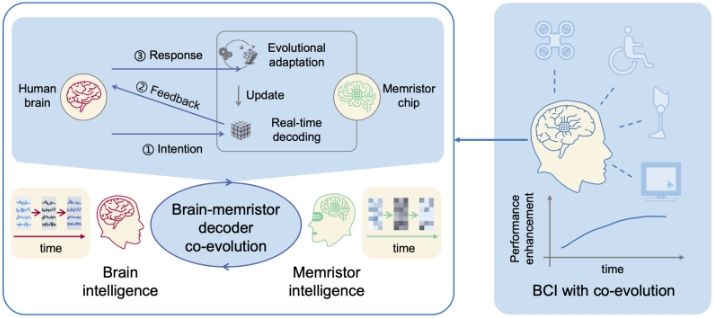
研究團隊發現,腦電信號中的非平穩特性不僅來源於傳統觀點認為的背景腦電變異,而且與閉環腦機交互引導下的任務腦電演變密切相關。基於這一發現,團隊首次提出了“雙環路腦機協同演進框架”,並通過憶阻器神經形態器件構建了全新的腦機接口系統。
天津大學供圖
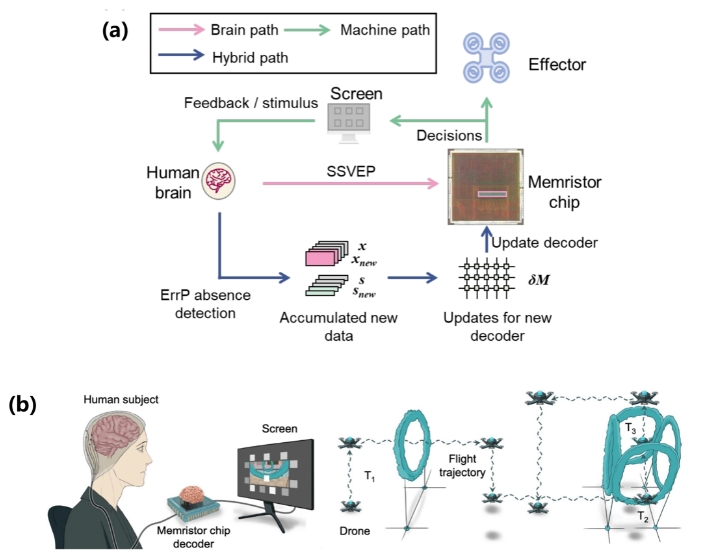
在雙環路框架下,“機學習”環路中的憶阻器解碼器通過適應腦電信號波動完成解碼參數更新,“腦學習”環路中的任務相關腦電特徵在“決策-反饋”循環的引導下不斷正向演化。相關算法基於128kb規模的憶阻器神經形態器件實現了硬件化部署,將腦電信號的多步計算過程優化為單步計算。
“相較於傳統純數字硬件方案,‘雙環路’腦機接口系統精度更高、能耗更低、能處理更復雜任務。像效率提高2個數量級(百倍)以上,能耗降低3個數量級(千分之一)以下。”許敏鵬舉例説,傳統無創腦機接口技術通常只能控制無人機進行簡單的二自由度飛行,研究團隊開發的“雙環路”腦機接口系統可高效支撐無人機完成上下、左右、前後、旋轉四自由度任務目標。
在連續6小時的長時程腦機交互實驗中,大腦和解碼器的貢獻比例呈現動態變化,展現出了腦機協同演進的過程:初期以解碼器自適應更新為主,隨着時間推移,大腦貢獻逐步增加,最終腦機接口性能不僅沒有下降,準確率還提升了約20%。
許敏鵬表示:“這項研究首次提出了腦機協同演進的概念,並基於憶阻器神經形態器件完成了技術驗證,通過長時程大腦與憶阻器神經形態器件之間的信息交互,初步實現了生物智能與機器智能的互適應、互學習,為未來實用型腦機接口系統提供了重要的理論基礎與技術支撐,也為腦機融合智能的發展開闢了新的方向。”他還透露,“未來,這款系統計劃拓展到更多便攜式或可穿戴腦機接口設備中,服務於消費級、醫療級等各類智能人機交互實用場景。”
(科技日報記者 陳曦)