獨家對話開普勒CEO胡德波:人形機器人賽道,中美一梯隊,日本已掉隊
芮瑞
2025年可以説是人形機器人的“破圈”之年,更是量產元年。機器人越來越能整活兒,資本也越來越為之瘋狂。有人從中看到了未來,有人看到了泡沫。
當我們還在看一眾機器人表演時,有位低調的“超級藍領”,早就到上汽通用“搬磚”去了。連Figure(美國人形機器人“明星”企業)的CEO都親自給它點贊。它就是對標特斯拉擎天柱的開普勒K2大黃蜂。
近日,觀察者網·未來方法論欄目來到上海張江人工智能島,對話上海開普勒機器人有限公司CEO胡德波。胡德波説,開普勒約80%的零部件為自研,得益於行星滾柱絲槓執行器等核心技術,大黃蜂可實現30公斤負重和8小時續航。
他認為,目前在全球人形機器人行業當中,中國憑藉強大的供應鏈、豐富的應用場景、驚人的迭代速度等優勢脱穎而出。中國、美國在第一梯隊,歐洲一部分國家是第二梯隊,傳統的機器人大國日本反而掉隊了。
以下為對話實錄:
【對話/胡德波&王慧 編輯/王愷雯、張菁娟】
觀察者網:胡總您好。
**胡德波:**王老師您好,歡迎您到訪開普勒。給您介紹一下,這是開普勒最新一代人形機器人——K2大黃蜂。
觀察者網:哈嘍,K2,你好。
**K2大黃蜂:**歡迎來到開普勒。

開普勒K2大黃蜂人形機器人 觀察者網
**胡德波:**我們這台機器人是為工業場景打造的,給它的定位是藍領人形機器人。
觀察者網:它已經開始進廠打工了是嗎?
**胡德波:**是的,已經在進行打工人的上崗訓練。K2大黃蜂身高一米七五,體重75公斤,是一個強壯小夥子的設定。它的雙臂協同負載可達30公斤,是全行業最強的。它的續航時間也是全行業最長的,充一次電,可持續工作8小時。這些設定都是對標工人的能力去設計的,因為我們對人形機器人的期望是它能夠真正替代人去工作。
觀察者網:大黃蜂一下子能讓我們想起來的是特斯拉的擎天柱。它們兩個是有什麼共同的基因嗎?
**胡德波:**我們跟擎天柱都採用了一個擬人設計,其中包括了旋轉執行器、用行星滾柱絲槓的直線執行器來模擬人的肌肉運動等。基於行星滾柱絲槓的特性,大黃蜂和擎天柱都具有在負載、功耗等方面匹配工業場景的特性。
大黃蜂跟擎天柱最大的區別在於它的前臂和靈巧手這一部分。大黃蜂的靈巧手是可以快換的一個模式,因為我們是聚焦做工業場景,所以有的時候它並不需要每一個任務都用靈巧手,因此我們有一個快換機制,可以匹配不同的末端的夾具。比如説在做負重搬運的時候,我們會給它換上定製的一些末端的夾具,以實現更大的負載。
在負載能力上,我們甚至是強於擎天柱的。可以説,大黃蜂在工業場景裏面的幹活能力,比擎天柱是更強的。
同時,因為我們自研了很多的核心零部件,並且基於中國供應鏈的強大的能力,大黃蜂的成本是遠遠優於擎天柱的,這也是我們的一個優勢。

2025年6月22日,浙江杭州,觀眾在杭州一機器人展上觀看特斯拉擎天柱(Optimus) 東方IC
觀察者網:30公斤的負重,8小時的續航,這在機器人裏也是性能非常高的,開普勒是怎麼做到的?
**胡德波:**這裏麪包含一項非常重要的核心技術——行星滾柱絲槓的執行器,這也是K2大黃蜂跟別家人形機器人非常不一樣的地方。在對應人體肌肉羣的部位,所配備的長柱狀執行器均採用該技術。它能夠輸出大負載的推拉力,功能類似人體肌肉羣,可被視為“機器肌肉”。K2大黃蜂的大臂、小臂、大腿和小腿全部搭載了行星滾柱絲槓執行器,全身共計14個。
負載能力最強的是大腿,像這樣一個行星滾柱絲槓執行器,最大負載力可達800公斤。這一負載水平足以拉起一架三角鋼琴,或一輛重載的摩托車。
觀察者網:所以K2大黃蜂力氣大,主要是因為行星滾柱絲槓執行器?
**胡德波:**是的。除了力氣大之外,不管是大負載、小負載,它的傳動效率或者轉化率都非常高。
如果是一個旋轉架構的機器人,像這樣站着,它的每一個關節都在大電流,在輸出很大的這個力氣去抵抗它全身的重力。那樣架構的機器人可能只是站在那裏,兩三個小時就沒有電了。而K2大黃蜂如果靜態站立。可以站20多個小時。在實驗室的平地行走測試中,它可以連續行走10個小時。

開普勒K2大黃蜂單手舉起五公斤重的啞鈴 觀察者網
觀察者網:我對續航比較有概念的是我的手機,比如説我用它來打遊戲,它的續航時間往往較短,但我如果只用它來聊天或者是看看網頁,續航時間明顯變長,這個道理是不是也同樣適用於機器人呢?
**胡德波:**是的,如果它搬很重的重物,並在崎嶇的路面行走,它的功耗會顯著加快。我們有一個測算,如果是綜合工況,比如在工廠裏幹活,它大概充一次電,可以連續幹8個小時。
工廠裏面的工人,他們也不是一直在搬重物的,他可能會搬一下,再走過去,這時候他其實是空手的。所以在持續搬運重物的場景中,機器人的幹活能力一定是比工人強的。因為它的肌肉是不會累的,只要保持供電,就不需要休息,可以持續地工作。
此外,行星滾柱絲槓還有一個很好的特點,就是它的磨損特別慢,使用壽命會非常長。
觀察者網:壽命有多長?
**胡德波:**可以輕鬆幹到上萬小時。
觀察者網:滾柱絲槓的工藝非常複雜,製造難度也很高,我瞭解到之前我們國家更多依靠進口,是這樣嗎?
**胡德波:**對,特別是在工業上用的滾柱絲槓,一些歐洲、日本的廠家做得很精良。在人形機器人使用的滾柱絲槓上,開普勒是第一家自研自制,並把它批量地用到機器人本體上的企業。
我們在早期研發的時候,整個供應鏈非常不健全,而且零部件成本非常高,所以我們做了大量的自研。這面牆上展示的很多核心零部件都是我們自研和自制的。現階段,我們正在和硬件供應鏈的夥伴共建一個生態,一起打造一個“人形機器人硬件夢之隊”。同時我們也在具身智能領域擴展我們的生態夥伴,共同來打造優秀的機器人大腦。
觀察者網:開普勒的零部件中,自研比例有多高?
**胡德波:**現階段大概有80%自研,只有極少數的、在算力方面有進口的芯片,別的基本上是自研或是國產替代。
觀察者網:為什麼這麼強調國產替代?
**胡德波:**因為人形機器人需採集海量數據,且全身搭載的傳感器數量眾多,所以它一定會涉及到安全問題。因此,自主可控還是非常重要的一個環節。

胡德波介紹開普勒自研零部件 觀察者網
觀察者網:業內普遍預計2025年是人形機器人量產的元年,今年開普勒有沒有量產計劃?
**胡德波:**今年也是開普勒量產和商業化的元年,我們的整體規劃為:本年度完成百台級別的產品交付;明年將交付規模提升至千台級別;到後年,商業閉環將全面形成,正式進入增長階段,屆時產品交付量將突破萬台規模。
觀察者網:開普勒的商業化路徑或者説邏輯是怎樣的?
**胡德波:**我們認為,人形機器人的最佳應用起點是工業場景。
工業場景相對封閉,機器人所需執行的任務具有較強的特定性,操作對象的數量也相對有限,這對機器人的泛化能力要求較低。同時,封閉環境的可控性較強,便於對安全性進行全面且細緻的考量。
此外,工業客户習慣使用自動化設備,如工業機器人、協作機器人,且具備良好的付費意願。因此,人形機器人在工業場景中的價值能夠更容易被論證,通過分階段的測試與迭代,還可逐步滿足客户的實際需求。
在工業場景中,隨着機器人的規模化部署,將積累海量的運行數據。依託這些數據,我們可以對硬件本體平台及各項作業能力進行迭代與優化。在此基礎上,機器人能夠走向更廣闊的場景,從商業服務場景,到遠期的家庭場景(如養老服務等),最終實現應用空間的進一步延伸。
觀察者網:在工業場景的商業化落地,主要看哪幾個指標?
**胡德波:**對於我們現在訓練的場景來講,客户的核心需求主要集中在以下四個方面:
一是它的負載力,它能不能搬運或者處理一些工件;
二是它的續航時間,能不能持續地幹活。使用方一般至少都會需要它幹兩個班次,要連續工作16個小時,有一些使用方,甚至希望它一天干三個班次,相當於是24小時不停地幹。所以對它的續航時間要求是比較高的,不能夠頻繁需要換電,或者頻繁需要充電;

三是它的安全性。它是在替代一部分的人力工作,通常需要人機配合,或者在周圍是有別的工人在場的環境中工作,所以它不像傳統工業機器人那樣,給它一個圍欄,隔出來一個作業專區,那個專區是沒有人的。像這樣人機混合的工作情況下,安全性是非常重要的,它不能傷害到人,一次都不行;
四是它的投資回報。它進廠幹活之後,需要有一個比較好的ROI(投資回報率),能夠產生比較好的回報。
觀察者網:現在工業臂、工業機器人很成熟了。人形機器人在工廠裏對這些機器人是一種怎樣的補充?
**胡德波:**你説得非常對,它們是一個補充的關係,不是去競爭或者替代的關係。現在在很多的製造領域,比如像汽車,裏面大量使用工業機械臂去完成一些固定工位的、高精度、高節拍,甚至高承載力的一些工作。但是剩下的很多工位對柔性、對泛化性有一定的要求。
一個機器人,它可能不只是在一個工位幹,它會這個工位用一用,再去另外一個工位用一用。針對於這樣的場景,人形機器人是一個非常好的,可以替代現在還在使用人工的這些工位。
觀察者網:我看到一個介紹,如果一個企業購買了一個標準版的K2大黃蜂后,大概在1.5到1.8年可以收回成本,這個賬是怎麼算的?
**胡德波:**我們有一個很粗略的計算。從商用部署的基礎門檻來看,人形機器人的工作效率需達到至少0.6個人的水平。我們以機器人日均承擔兩個班次作業來算,假設其單日工作效率可達到1.5個人的水平,就等同於單個班次效率為0.75個人。
以中國工人的年均成本來算(區域不同會各有不同,行業也會各有不同,此處僅作簡單計算),若按年均10萬人民幣計算,這樣一台機器人一年能產生的勞動回報約為1.5乘以10,大概是15萬人民幣。
扣除每年約3萬元的機器人使用和維保費用後,一台機器人一年剩餘的勞動價值約為12萬人民幣。我們機器人的成本按3萬美元(摺合人民幣約為21.5萬元)計算,以此推算,投資回報週期約為1.7年。
這個計算是非常粗略的,尤其是中國勞動力成本的區間變動還是比較大的。
觀察者網:購買了機器人之後還有一些維護的費用、軟件的費用等等,分攤到它整個生命週期,大概是什麼樣子呢?會不會吞噬掉利潤?
**胡德波:**不會,我們的測算大概是這樣,人形機器人需要一年做一次年度維保,就有點像電動汽車一年做一次保養一樣,這取決於它磨損的程度。但因為我們的機器人的架構,像滾柱絲槓,它的磨損是很慢的,它的生命週期其實是很長的。另外我們會有一些年度的升級軟件費等,總體加起來,費用可能只會佔到購買機器人本體成本的10%左右,不會顯著影響到它投資回報的測算。
觀察者網:我注意到,大黃蜂之前被Figure的CEO親自點贊,也已經參加了很多的國際展會,並且非常受歡迎。您在這些國際展會上被外國的客户問到的最多的問題是什麼?
**胡德波:**它不僅得到了Figure CEO的點贊,我們在早前去到CES(國際消費類電子產品展覽會)時,微軟的總裁納德拉也親自過來“拜訪”它。
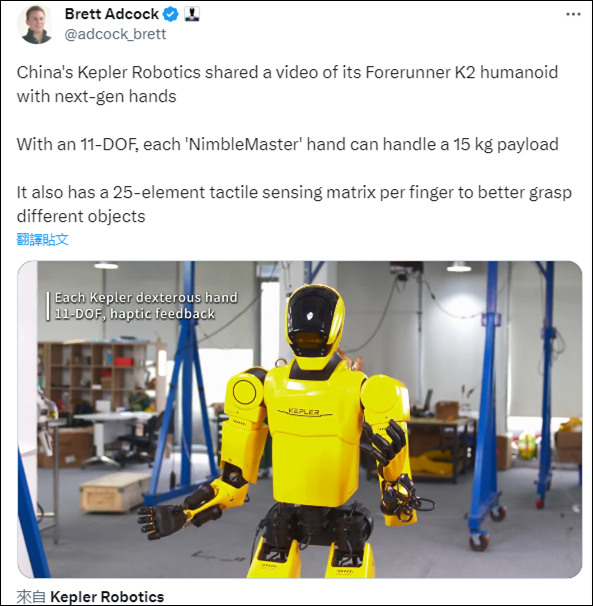
Figure AI創始人兼CEO佈雷特・阿德科克(Brett Adcock)在X主頁分享開普勒大黃蜂
外國客户非常關心,這個人形機器人什麼時候能進他們的工廠幹活。其實大家對人形機器人的需求是非常迫切的,恨不得現在放到工廠裏面就能幹活兒,所以(他們)對於幹活的時間表是最關心的。
除此之外,他們也關心機器人怎麼部署,應該怎麼去訓練它掌握一個新的技能,所以也會問一些具體的技術問題。他們還關心,到底這個機器人需要多少錢?它的生命週期裏還需要什麼別的費用等等。
觀察者網:接下來想跟您聊聊人形機器人這個行業。我們瞭解到,您之前在中興、華為等頭部科技企業擔任高管,基於這樣的從業背景,您為何會投身人形機器人賽道,且堅定選擇工業場景?我們知道工業場景又累又重,而且與服務機器人相比,其商業化變現週期相對更長,您做出這一選擇的考量是什麼?
**胡德波:**我個人算是比較幸運,1999年研究生畢業,正好趕上通訊行業大發展,那也是上一波移動互聯網的技術革命浪潮。
1999年我開始加入通訊行業的時候,中國的通訊企業跟西方企業相比還是有差距的。經過我們那些年的努力,中國通信行業逐漸實現了全球領先。這段經歷讓我深刻體會到:當一個人在一個技術浪潮上去做一些事情的時候,可以隨着這一波的大浪,更多、更好地發揮自身價值。
大約10年前,也就是2015年,我開始加入機器人和人工智能領域,我當時的一個判斷是,人工智能加機器人是未來20年甚至50年最大的一波浪潮。同時,我內心裏也希望人形機器人能給這個社會帶來生產力的變革,讓大部分的普通人都能夠過上更有意思的生活,可以去做一些自己喜歡的事情,把有些枯燥的工作丟給機器人。
觀察者網:機器人一定要做成人形,一定要有兩條腿,有靈巧手,像人一樣有個腦袋嗎?
**胡德波:**這是很好的問題,也是經常被討論的一個問題。從中短期來看,其實在很多落地的場景,它未必一定要是人形,畢竟就現階段來講,雙足行走的技術難度還是比四個輪子要更高一些,穩定性方面也要差一點。因此,很多機器人的構型可能更專用一點。
我們自己也做了一個四輪底盤版本的機器人,在早期工業場景部署時,會優先選擇該版本,因為它具備更高的可靠性與移動效率。
如果看得遠期一點,當機器人徹底突破穩定性相關的技術挑戰,具備與人相當的行動能力後,全人形構型有望成為主流。這是因為它有擬人的形態,能完美適配人類的工作空間、生活空間,並且它跟人的交互感也是最好的。
觀察者網:所以您認為機器人最終的形態或者是最佳的形態就是人形?
**胡德波:**是的。

2025年7月29日,WAIC世界人工智能大會上,AI機器人尤其人形機器人具身智能體的創新突破成為焦點。 東方IC
觀察者網:業界普遍認為,人形機器人最主要是本體、大腦和小腦三部分。從技術上看,這些部分各自發展到什麼程度?最大的瓶頸是什麼?
**胡德波:**從近些年人形機的發展來看,本體和小腦的發展應該來説非常快。以前的機器人可能在平地上隨便走一走,大家就已經覺得不錯了,現在的機器人展現出各種運動能力,説明小腦的這些技能發育還是非常快的。人形本體這一平台現在也是做得越來越好,它的架構、各種關節、可靠性、穩定性,包括量產之後的成本控制,也都有非常大的進步。所以本體和小腦逐步會接近,在某一些場景裏能先落地、先使用起來,達到相應要求。
大腦的發育現在進展也非常快,特別是在研究領域,機器人也逐漸開始展現出比較好的泛化性,泛化之後還能有不錯的成功率,雖然離工業應用的要求可能差距還是比較大的,所以我們還會有自己的一些大腦方面的設計。但我們還是看到,通用大腦在快速地發育,我們也期待它能夠發育得更快,變聰明的速度能夠更快。
觀察者網:為什麼從2024年開始人形機器人產業突然就爆發了?和DeepSeek等大模型的賦能有關嗎?有觀點認為,大模型的發展顯著降低了人形機器人“大腦”的開發成本,並加快迭代。您怎麼看?DeepSeek等大模型真能解決機器人“腦殘”嗎? 還是説它被過度神話了?
**胡德波:**引發這一波人形機器人熱潮有兩個因素:一個是人形機器人的本體,另外一個就是具身智能。大家對具身智能的信念,或者對於它的信仰來自於文本大模型的突破,就是LLM(大語言模型)。拿大量的文本訓練之後,它能夠在文本上展現出超人的智商。在文本大模型這一波的突破之後,大家對於機器人的具身大模型,特別是基於多模態的大模型能夠賦能到機器人大腦的研發很有期待,這是它一個很核心的驅動力。
現在也有不同的技術路線,有的在思考怎麼做機器人的具身大腦,有的在思考多模態大模型,有的可能在做基於力控,有的可能一定要加上觸覺,有的可能是要做空間具身智能,也有可能要做世界模型,要把跟物理世界的交互,把物理特性全面地考慮進去。開普勒也在持續關注不同的技術路線,有一些成果我們也會合作,將它們放到我們的機器人身上去進行驗證。
觀察者網:我們看到,現在人形機器人受到資本市場的熱捧,可以説是最熱的風口。但有些人看到的是未來,有些人看到的是泡沫。作為一個創業者,您怎麼看這些不同的聲音?
**胡德波:**確實,這個行業得到了很高的關注,而且可能會有人覺得有泡沫化的傾向。從我個人的經歷來看,如果我要去回望,比如説1999年做通訊的時候,那個時候互聯網才剛剛開始萌芽,那時候才剛剛有ICQ,QQ才剛剛開始起步。如果你回看那個階段,其實你砸多少錢去做互聯網,去做基礎設施、做平台,或者去做應用,都有很好的發展空間。所以如果以類似於互聯網這樣大的技術革命來講,我們認為人形機器人+具身智能可能是比那一波更大的浪潮。

2025年7月26日,中國上海。2025年世界人工智能大會(WAIC)上,宇樹人形機器人與一名參觀者之間進行拳擊比賽 東方IC
如果我們相信這是一波大的技術浪潮,那麼當前行業內的投資和熱度其實就不存在泡沫化。如果就整個人形行業的總投資量來看,其實可能還不如開發商的一個樓盤。我覺得,這個行業可能確實是比較熱,但説不上是泡沫化,而且以現在人形行業的估值和它後邊能達到的空間來講,它的成長空間就在那裏。
這裏面這麼多的企業在做,哪一些企業比較靠譜?哪一些企業它的戰略路徑可能風險會更大?這就看每個人自己的判斷。
觀察者網:在這波浪潮之下,有千千萬萬的創業公司成長起來了,等到大浪淘沙之後,您覺得什麼樣的公司才能活下來?
**胡德波:**這是很好的問題,也是我們在思考的問題。
如果站在五年或十年後的時間節點回望,可能會有兩種類型的企業會活下來。
一類是定位比較精準的,持續去耕耘的企業。這類企業能實現商業閉環,能夠獲得堅實的用户,而且能形成一定的護城河,不只是通過單點的技術,而是通過整體的全棧的技術加上解決方案,包括後續的售後服務等各方面的整體能力。
還有一類能活下來的其實就是巨頭。它可能來自於汽車行業,也可能是像華為、小米等科技巨頭,當然它們會有自己感興趣的領域,但更多可能還是會在C端,這一領域未來或將面臨激烈競爭。
誰會活到那個時候還很難説。
觀察者網:我們再從全球層面來看一看人形機器人行業的發展。人形機器人領域在第一梯隊的國家有哪些?它們各自有怎樣的優勢?尤其是中國現在處於一個怎樣的位置?
**胡德波:**從全球來看,我認為中國當前已具備顯著優勢。這跟大家的印象可能會有一點不一樣,因為可能之前像波士頓動力、本田的ASIMO、特斯拉擎天柱等產品率先入場,表現亮眼。大家可能覺得美國還是處於一個非常不錯的狀態,美國確實做得也很好,而且這一波人形浪潮其實是馬斯克帶起來的。
但不得不説,在人形機器人行業的兩大核心門檻——本體和小腦——領域,中國已領先全球。大腦其實是在一個類似的起跑線上,大腦部分的研究美國雖在科研方面一貫跑得比較快,但由於當前技術尚未收斂,所以這時候大家的機會相對來説比較均等。我們也看到,國內在機器人大腦方面的一些很好的研究和進展。
放眼全球,在人形機器人行業,中國、美國肯定是在第一梯隊,緊隨其後的是一部分歐洲國家,包括德國、挪威等。挪威的人形創業公司1X也拿到很多投資,現在也在進家庭,機器人展現出很好的進展。
反觀傳統的機器人大國日本,它的ASIMO平台甚至都已經關閉了,它對人形的嘗試非常早,但因為戰略和技術不匹配,導致它在這一波熱潮起來之後,反而掉隊了。
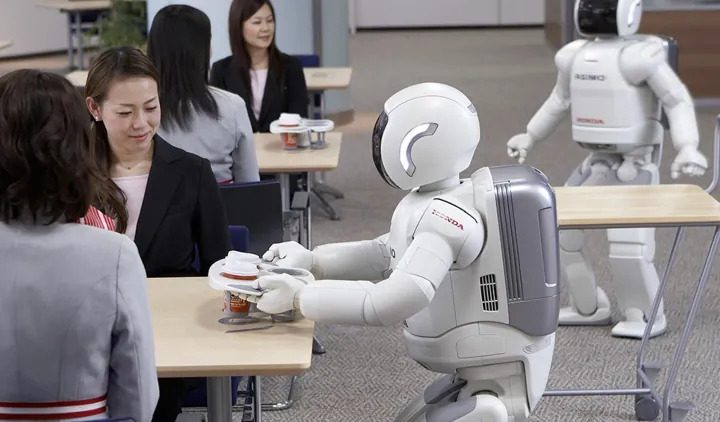
本田ASIMO機器人 本田官網
觀察者網:中美是第一梯隊,歐洲可以説是第二梯隊。那您覺得中國在本體和小腦方面做得比較好的原因是什麼?
**胡德波:**我覺得有幾個要素:一方面是中國的迭代速度非常快,我們不管做硬件還是做小腦,都可以很快地把它做出來,然後迭代去優化它。這個迭代的速度是沒有任何一個國家能比的,支撐這一高效迭代能力的基礎,是中國硬件的供應鏈和大量優質的人才資源。
另一方面,我們擁有龐大的應用場景和應用開發的能力。這其實才剛剛開始顯現出來,因為中國有最豐富的製造業場景,而在應用開發與落地層面,中國人一向是具有創新性和最能快速迭代的,所以那一部分的優勢我們也會逐漸顯現出來。
再者,包括現在對機器人的具身智能比較重要的,比如像數據的採集,中國也有優勢。在中國,可以非常低成本地、高效地採海量的真機數據,成本可控,歐美其實沒有辦法這麼做。
還有一點,以後如果説需要大規模的AI訓練,它消耗的除了算力之外,其實主要就是耗電。中國有全球最大規模的清潔能源,且有很好的電價來支撐這一塊的訓練。
現在如果狹義一點看的話,在本體、小腦這塊,中國的機器人展現出的能力已經非常強,而且進展速度非常快。所以以後真正到大腦到應用落地端,到開始開花結果的時候,中國的能力會展現得更為透徹。
觀察者網:中國現在在供應鏈上的表現怎麼樣?全球對於中國供應鏈的依賴程度又是怎樣的?
**胡德波:**硬件供應鏈一向是中國的強項。儘管在精密製造和部分加工設備方面,歐洲、日本可能還有局部領先,但就目前人形機器人所使用到的這些供應鏈來講,其實中國的國產替代或者供應鏈的能力已經越來越強了。應該來講屬於一個欣欣向榮的狀態。
國外我們也看到,它們出於一些考慮,可能想要在當地做一些自己的生產、加工,但這樣給它帶來的影響,一個是它的迭代速度會很慢,因為歐美工廠的工作效率等各方面其實是遠遠不如中國的,二是它的成本,它造出來的機器人可能會很貴,即便像馬斯克這樣非常善於製造和控制成本的,它的擎天柱的成本也是我們的好幾倍。

觀察者網·未來方法論獨家對話胡德波 觀察者網
觀察者網:你們有多少工程師?他們都來自哪些專業?
**胡德波:**我們現在的規模不到100人,絕大部分員工都是研發人員,這些小夥子很多都是學機器人的,人工智能、自動控制、計算機、機電、精密儀器、機械工程等各種專業背景都有。
實際上機器人還是一個非常跨學科的系統工程,它需要各種技術模塊的人才,甚至我們可能還需要研究熱仿真的人才,需要研究可靠性的人才,需要研究製造加工工藝的人才,需求面是非常廣的。
觀察者網:剛剛您提到很多的學科,大家如果未來想要投身於人形機器人和具身智能領域的話,都可以考慮起來,它還是一個跨學科比較強的就業方向。