釐米級觀測!我國成功突破這一技術瓶頸
近日,在南海的晨光中
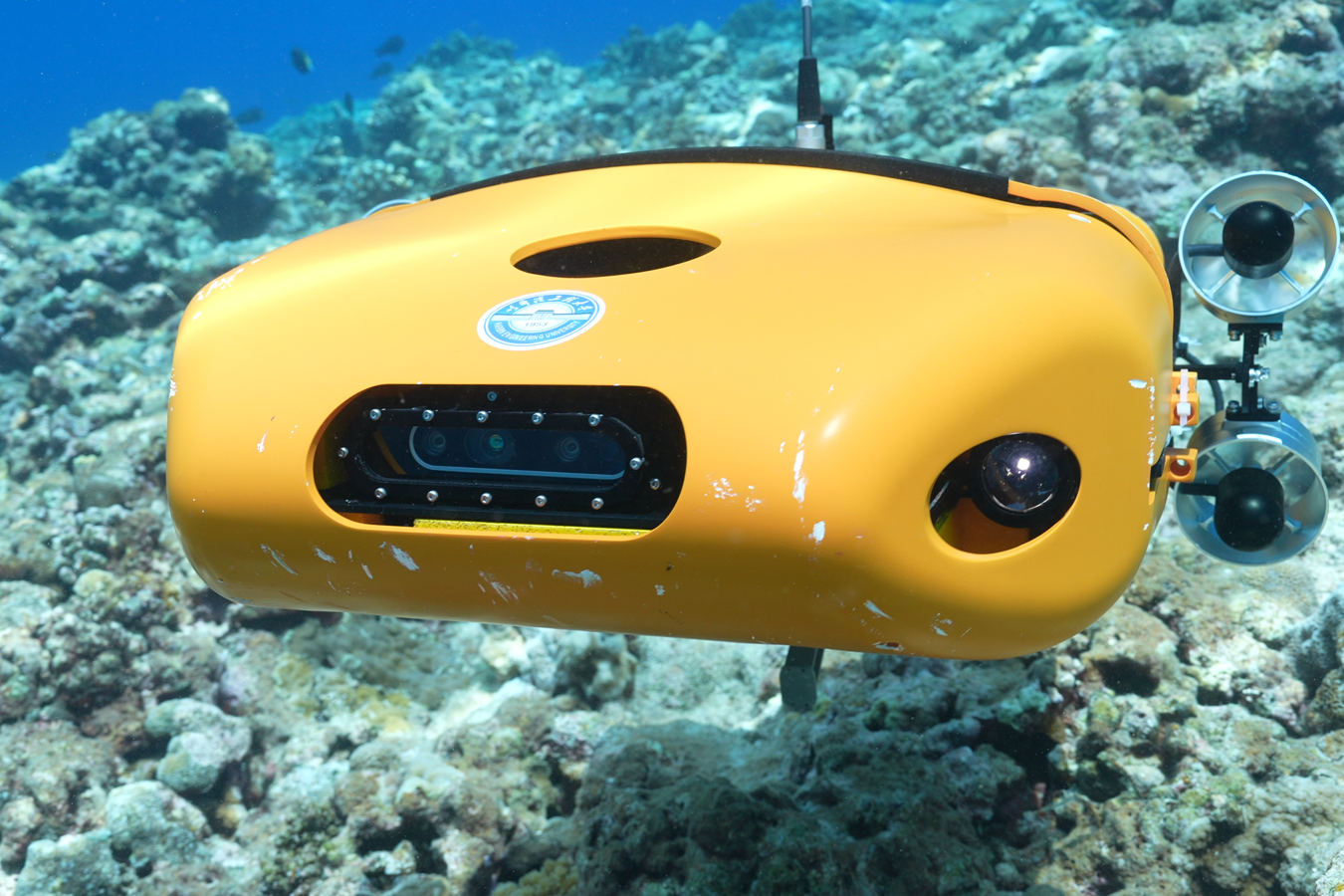
一台直徑約70釐米的水下機器人
以優雅的弧線潛入碧波
這是哈爾濱工程大學船舶與工程學院
王剛教授團隊研發的
敏捷型水下機器人“海龜”
的真實工作場景
它不僅實現了
近海底環境觀測的釐米級突破
更以靈動身姿顛覆了傳統水下機器人
“笨拙”“僵硬”的刻板印象
開啓一個更加精準、高效、環保的
水下探測新時代
“我們發現海龜傾斜拍動前肢
的推進方式既能減少水體擾動
又能保持高效推進”
團隊成員劉開鑫回憶
經歷了無數次失敗後
團隊推導出了
機器人低擾動航行性能與推進器佈局
以及機器人外形參數之間的數學公式
極大地提高了研發效率
對比試驗中
“海龜”機器人憑藉其
精準佈局的推進器
在航行時幾乎不泛起漣漪
將沉積物干擾降低了90%
為了讓機器人學會瞬時感知
以確保在貼底航行時不會觸底發生意外
團隊提出了“三點慣性測量感知方法”
使機器人數據噪聲降低約76.2%
響應時間縮短1.1倍
傾角控制的穩定性提升7.16倍
經過持續攻關
團隊成功在跟蹤算法中
引入了姿態約束算法
大大提高了機器人的敏捷性
“海龜”機器人360度的靈活運動
成功突破了水下航行器在海底複雜地形
全域機動的技術瓶頸
不僅能用於觀測珊瑚
還能在水下捕撈、搜救等方面
發揮重要作用
採寫:科技日報記者 朱虹
供圖:哈爾濱工程大學